
参数扰动下基于制动控制的人地碰撞损伤防护风险*
2023-03-08 05:53:36邹铁方
汽车工程 2023年2期
邹铁方,周 靖
(长沙理工大学汽车与机械工程学院,长沙 410114)
前言
车人碰撞事故中,行人所受伤害主要来源于与车辆的首次碰撞及随后与地面的第二次撞击。总体而言,车辆易造成行人更大的受伤风险[1-4],但亦有大量研究表明地面所致损伤不能忽略[4-5]。2013年,冯成建等[6]通过仿真发现,当碰撞速度≤30 km/h时,地面所致损伤可能比车辆所致损伤更严重;2017年,Li 等[7]强调当车辆以20-30 km/h 的速度撞击行人时,人地碰撞损伤不能忽视;同年,邹铁方等[4]通过事故再现发现胸部直接损伤主要来源于地面碰撞;2018年,Shang 等[8]通过分析1 221例德国行人事故案例发现,当碰撞速度低于40 km/h时如能消除地面相关损伤则可减少2/3 的总伤害费用,并在2020年通过尸体实验研究,发现低速碰撞中地面所致颅脑伤害比车辆更严重[9]。相关成果表明,低速下地面造成的行人损伤不可忽视,研究人地碰撞损伤的防护方法很有必要、极具价值。
为降低人地碰撞损伤,学者们提出了各种装置与方法。比如文献[1]中提出了在车头设置多个安全气囊以阻止人体落地的设想,Khaykin等[10]发明了将事故后人体粘到车上的技术方案,Li 等[7]提出了行人友好型车头。但文献[1]和文献[10]的被动安全装置很难实现;而文献[7]的最优车头以保护人车碰撞为主,仿真显示80%案例中行人头部先触地且30%案例中人地碰撞损伤高于车辆所致损伤;说明目前防护人地碰撞损伤的可用方法极少。因此,Zou等[11]在2019 年首次从主被动安全一体化角度提出一种车辆制动控制方法,通过控制车辆制动进而影响行人运动姿态从而降低人地碰撞损伤;进一步地,他们通过穷举法研究了此类方法的最大效益,发现最优情况下可以降低90%的地面伤,表明通过控制制动降低人地碰撞损伤的上限很高[12]。同时,他们结合大量事故案例验证了此方法在真实事故中的可行性[13-14]。但是,相关研究均未能给出车辆再次制动时间t2的实践方案。为此,2021年,邹铁方等[15]提出了3 条车辆再次制动规则,并结合已有研究形成了一套完整的降低人地碰撞损伤的车辆制动控制方法,仿真结果表明其可以有效降低人地碰撞损伤且不会增加车辆所致损伤。此方案的提出将基于制动控制的人地碰撞损伤防护方法向实践方向推进了一大步。
邹铁方等[15]提出的车辆制动控制方法中,需在行人头部与车辆首次接触时刻(t1)松开车辆制动,仿真中t1取最大头-车碰撞加速度时刻。实践中,不仅要求相关车载监控设备能及时且准确测量到t1,还要求汽车电控单元(ECU)及时响应。而ECU在工作中常需一定延迟时间[16];加之受行人穿戴、发型和事故中人体手臂等部位的影响,精准测量t1极具挑战,这显然会给相关技术带来不可预估风险。而文献[17]中指出,降低风险能提升这些技术的接受度,那么t1扰动会导致哪些风险?若t1早于头车碰撞时刻,车辆所致行人损伤是否增加?若t1晚于头车碰撞时刻,人地碰撞损伤防护效果是否改变?为此,本研究将在文献[15]中所提车辆制动控制方法的基础上,结合MADYMO 设计实验并仿真,以评估t1扰动所致的可能风险。
1 方法
1.1 车辆制动控制方法
车辆制动控制方法为邹铁方等[15]提出的方案(见图1)。当汽车检测到事故不可避免时完全制动车辆以降低碰撞车速,故在人车碰撞发生的t0时刻减速度已达最大;以头-车碰撞时刻为t1时刻,至t1时刻车辆开始松开制动以追上抛出的人体进而影响人体运动学响应;考虑制动系统协调时间0.2 s后制动完全松开,然后车辆开始无制动向前运动到t2,考虑制动系统协调时间0.2 s后完全制动直至车辆静止。t2时刻按照以下3 个规则确定:(1)当监测到人体下肢、主要部位(头、胸及臀)超出车体两侧时再次完全制动;(2)当监测到人体臀部超过车辆前挡风玻璃下沿或行人双脚超过头部时再次完全制动;(3)当监测到行人头、臀部位置低于发动机罩盖前沿中任意一种情况时再次完全制动。
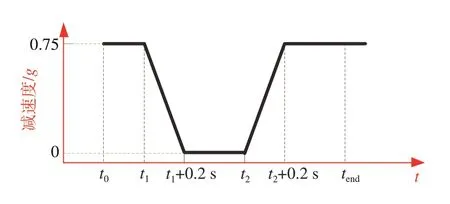
图1 车辆制动控制减速度曲线
1.2 实验设计
Li 等[11,18]结合MADYMO 软件提出了一套人车碰撞仿真系统,该系统包括6 种车速(21、31、41、51、61 和71 km/h)×5 个行人模型(6 岁儿童、5th%女性、5th%男性、50th%男性、90th%男性)×2 种步态(50%和100%)共60个仿真,仿真结果包含了低于41 km/h的人地碰撞损伤,其有效性已通过真实事故数据验证。本研究所采用的车辆制动控制策略是以降低中低速下人地碰撞损伤为目的,且不适用于6 岁儿童行人模型[11,15]。因此,结合Li 等提出的人车碰撞仿真系统,本研究选择3 种车速(21、31 和41 km/h)×4 个行人模型(5th%女性、5th%男性、50th%男性、90th%男性)×2 种步态(50%和100%)共24 个仿真组成本研究的虚拟仿真系统,其中行人速度为1.58 m/s,方向为面部朝向。
由于当车辆为货车时,控制车辆制动不能减少地面伤害;当车辆为跑车时,地面伤害发生率较低[12],并根据文献[19],本研究选择了大轿车、大型SUV、小轿车和小型SUV,如图2所示[15]。
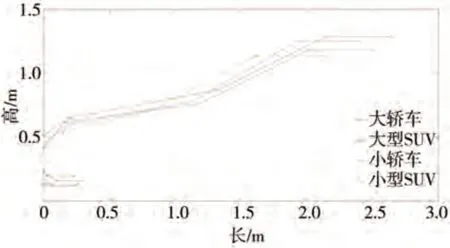
图2 研究中采用的4种车型
所有的仿真均用MADYMO 完成,仿真中人车和人地碰撞的摩擦因数分别为0.3 和0.6,仅考虑车头各结构的单一刚度水平[7,19]。碰撞场景见图3,车辆垂直撞击行人侧面,人体相对于车体中心线向人体后退方向偏离400 mm 以确保人体头部能与车体接触。
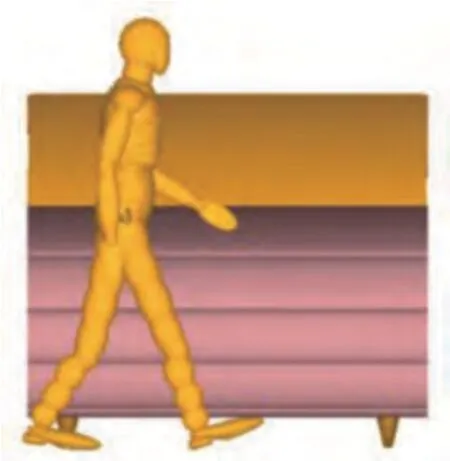
图3 仿真实验所采用的碰撞场景
通过观察4(4 种车型)×24(虚拟仿真系统)=96个仿真视频发现:在头车碰撞时刻后0.1 s时,大部分车辆速度已小于人体速度,且部分仿真视频中人体已脱离车辆;头车碰撞时刻前0.08 s 为部分仿真实验人车首次接触时刻。这两个时刻均具有明显的行人特征,有利于车辆监测。为了在较大范围内研究t1扰动对行人损伤防护效果影响,如图4 所示,以头车碰撞时刻为0 时刻,以0.01 s 为间隔,将[-0.08,0.1]中各间隔点作为t1扰动时刻(t1=0 时为无扰动时刻),当t1=∞时,车辆为完全制动。综上所述,共计模拟仿真实验3(车速)×4(行人模型)×2(步态)×4(车型)×20(t1)=1920次,其中控制制动仿真1 824次,完全制动仿真96次。

图4 t1扰动取值范围及所选节点
1.3 评价指标
(1)选择加权伤害费用(WIC,weighted injury cost,单位美元,$)以表征行人在碰撞中受到的整体伤害。交通事故中人体伤害包括头部、胸部、臀部和下肢等多部位的损伤,可用文献[7]和文献[21]中提出的WIC将各个部位的损伤融合为一个结果进行比较。对于某车型中1 组实验的24 个仿真,首先根据每个仿真中人体头部、胸部、四肢和骨盆所受伤害来评估各个部位的AIS水平,进而计算出其所需费用IC(injury cost,包括医疗与辅助费用),所有费用之和视为该次仿真的伤害费用[20],这些伤害费用是根据生物经济数据样本的简化模型提出的平均费用,而不是特定情况下的确切费用(ISO:13232-5,2005);然后将24 个仿真中总费用依据碰撞车速、行人高度和步态的占比加权取和为最终的WIC。其中,头部用头部损伤准则HIC15、胸部用胸部损伤指数TTI(thorax trauma index )、臀部用碰撞力、下肢用弯矩、膝盖用弯曲角度来预测损伤,各项阈值在之前相关预测AIS水平的文献中已给出[20]。故
式中:psi、phi和pgi分别为车速、行人高度、行人步态的比例;ICi为一组仿真中第i个仿真人体的伤害费用IC。显然某组仿真中WIC值越高,表明人体受到的伤害越大,反之则表示人体受到的伤害越少。
(2)WIC为综合损伤评价指标,但其不等价于单个部位所受到的伤害。为此本研究还将采用HIC(head injury criteria)头部损伤评价准则来表征行人头部在人车碰撞及人地碰撞中受到的伤害,其表达式如下:
式中:a(t)表示头部质心合成加速度;t2-t1表示HIC达到最大值的时间间隔,在实际应用中最大时间间隔取15或36 ms,本研究取15 ms。
(3)已有研究[11]认为车辆制动控制能降低人地碰撞损伤的主要原因之一是行人落地姿态的改变,则t1扰动是否影响行人落地姿态亦需关注,故本研究中将行人落地姿态作为一个评价指标。Crocetta等[23]发现行人头地碰撞损伤主要受跌落高度和旋转角度的影响,为此,他们针对事故中的行人碰撞后运动姿态提出6种落地机制(见图5),研究结果表明不同机制的头地接触速度具有显著差异。刘期等[13]在此基础上又增加了一种落地机制M6(见图6)。故本研究将采用7 种落地机制分析t1扰动对行人落地姿态带来的影响。
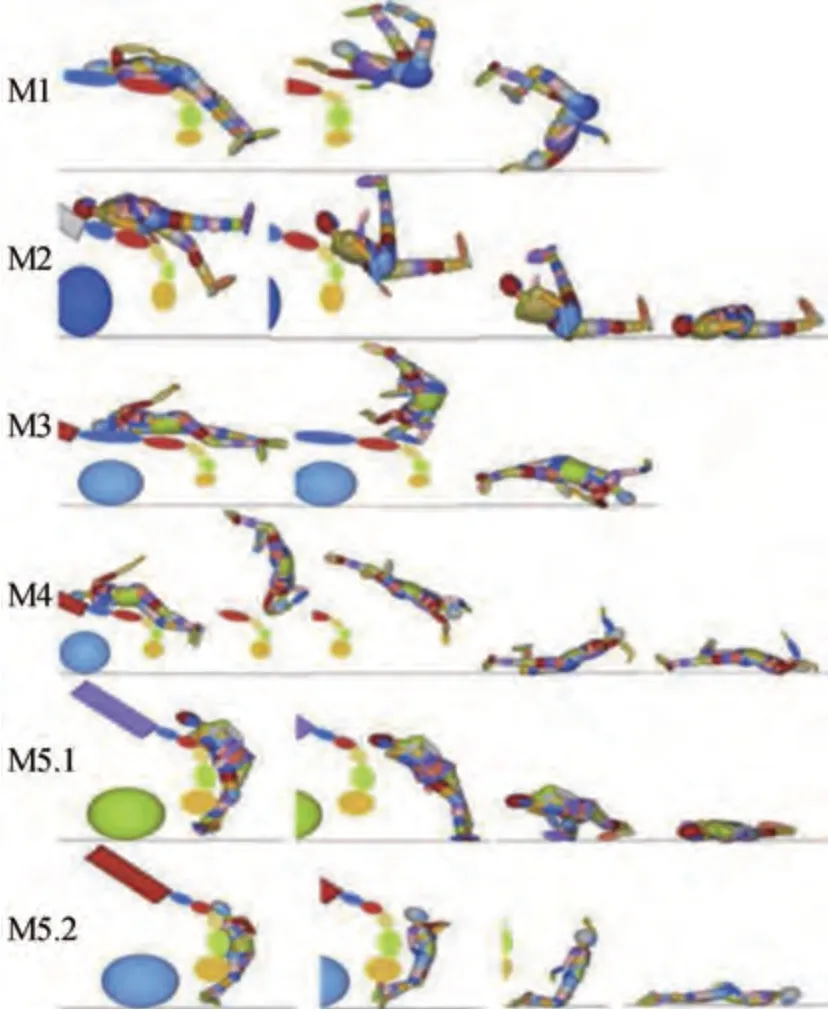
图5 文献[23]中提出的6种行人落地机制

图6 文献[13]中新增的一种行人落地机制M6
1.4 数据分析方法
采用SPSS 软件中的Jonchheere-Terpstra 检验方法对19 组案例的头部损伤以及不同落地机制下头部损伤、头地垂直碰撞速度分别进行显著性检验,采用Kruskal-Wallis 检验方法对t1扰动下4种车型的行人损伤防护效果进行显著性检验,检验水平α=0.05。根据检验结果P值判断各参数在两组案例中是否具有显著统计学差异,P<0.05 表示有显著统计学差异、P<0.01 表示有极其显著的统计学差异。采用SPSS 软件中Spearman 相关系数分析法对t1扰动下行人损伤防护效果(ΔWIC)与车头各参数的相关性进行检验。
2 结果
2.1 t1扰动对WIC的影响
大轿车、大型SUV、小轿车和小型SUV 在无t1扰动时,控制制动组车辆所致行人损伤均未增加(见图7),而地面所致行人损伤费用分别降低6 400 $、6 560 $、16 752 $、7 650 $,损伤费用降低幅度分别为60.22%、43.35%、83.62%、70.09%(见图8)。表明本研究所采取的车辆制动控制方法在t1不扰动的情况下可以有效降低人地碰撞损伤且不增加车辆所致损伤,这与Zou等[11-15]的研究结论一致。

图7 完全制动与控制制动车辆所致WIC 对比图(同一车型中左、右边竖柱分别对应完全制动、控制制动组数据)
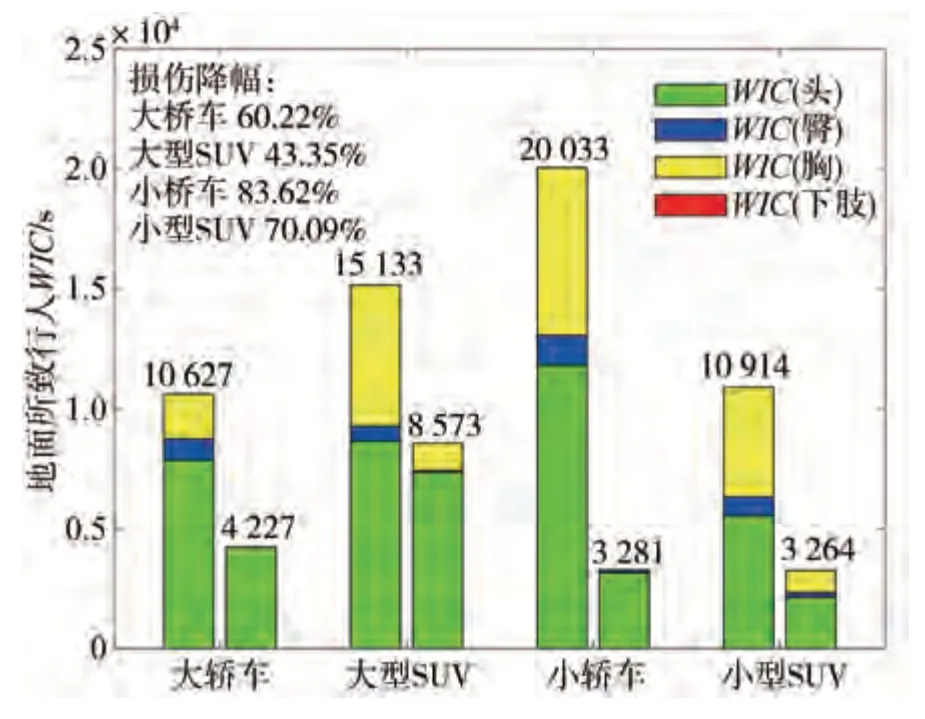
图8 完全制动与控制制动地面所致WIC及损伤降幅(同一车型中左、右边竖柱分别对应完全制动、控制制动组数据)
图9 给出了4 种车型在t1扰动下制动控制方法的有效率,表1 给出的4 种车型在不同t1扰动时刻下车辆和地面造成的ΔWIC和完全制动组WIC,可以得到如下结果。

表1 4种车型在t1扰动时刻下的ΔWIC、完全制动组WIC
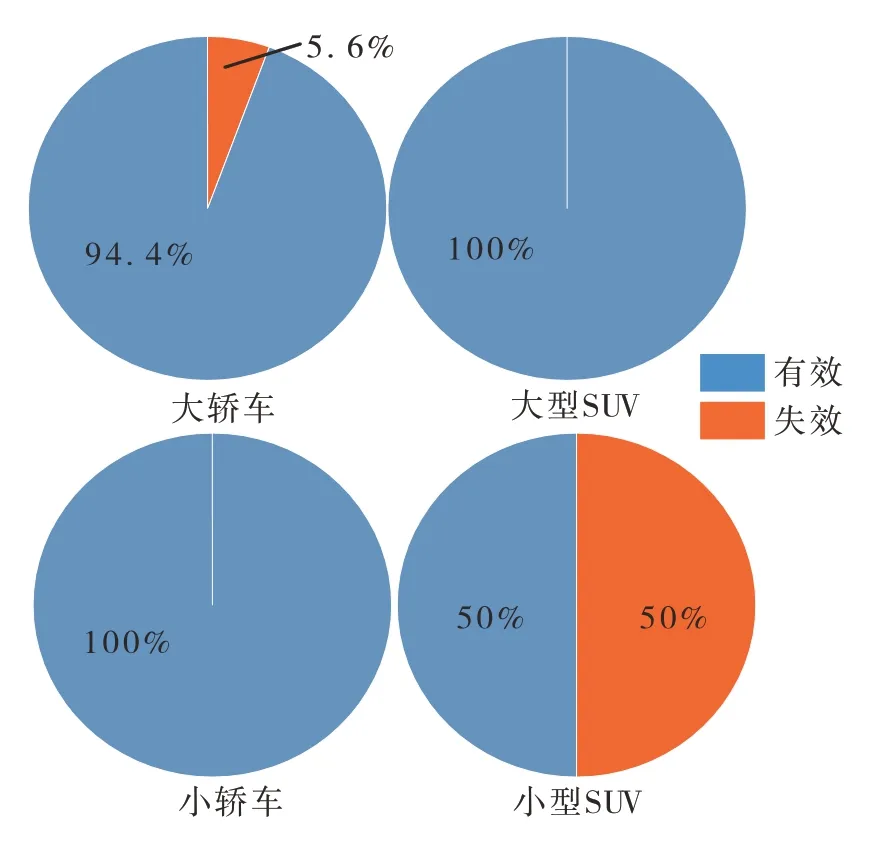
图9 t1扰动下制动控制方法的有效率
(1)大轿车:当t1提前扰动0.07 s时,控制制动组的行人损伤比完全制动组大,当t1在-0.08 和[-0.06,0.1]区间内扰动时,控制制动组行人损伤均小于完全制动组行人损伤。18 个t1扰动时刻中,17个t1扰动时刻的控制制动组行人损伤小于完全制动组,车辆制动控制方法有效率为94.4%,平均每组行人整体损伤费用降低4 207 $,损伤费用降低幅度为7.69%。
(2)大型SUV:当t1在[-0.08,0.1]区间内扰动时,控制制动组行人损伤均小于完全制动组行人损伤,车辆制动控制方法有效率为100%,平均每组行人整体损伤费用降低8 600 $,损伤费用降低幅度为21.29%。
(3)小轿车:当t1在[-0.08,0.1]区间内扰动时,控制制动组行人损伤均小于完全制动组行人损伤,车辆制动控制方法有效率为100%,平均每组行人整体损伤费用降低15 293 $,损伤费用降低幅度为24.24%。
(4)小型SUV:当t1在[-0.08,-0.06]、[0.05,0.1]区间内扰动时,控制制动组的行人损伤大于完全制动组,当t1在[-0.05,0.01]、[0.03,0.04]区间内扰动时,控制制动组行人损伤小于完全制动组。18 个t1扰动时刻中,9 个t1扰动时刻的控制制动组行人损伤小于完全制动组,车辆制动控制方法有效率为50%,平均每组行人整体损伤费用降低-700 $,损伤费用降低幅度为-1.25%。
总体上,t1在[-0.05,0.04]范围内扰动时依然可保证制动控制方法的效率;所有t1扰动组中,有62组(占比86.1%)WIC降低;WIC总降低量493 203 $,总体降幅12.80%。表明所研究的制动控制方法能在较大范围内抵抗t1的扰动。
但结果亦显示,t1扰动时,不同车型的行人损伤防护效果不同。小轿车的行人损伤防护效果最好,18个t1扰动时刻下均维持了车辆制动控制方法的有效性,且能较大程度地降低行人损伤(降幅24.24%);小型SUV 的行人损伤防护效果最差,控制制动下的18个t1扰动时刻中,仅有9个t1扰动时刻控制制动组行人损伤小于完全制动组,且平均每组WIC增加700 $(增幅1.25%)。表明车型会严重影响t1扰动下的车辆制动控制方法的有效性。进一步地,采用Kruskal-Wallis 检验方法对t1扰动下4 种车型的行人损伤防护效果(ΔWIC)进行显著性检验,检验结果P=0.000<0.05,证实4 种车型在t1扰动下的行人损伤防护效果的确存在显著差异。
2.2 t1扰动对HIC15的影响
车辆所致头部损伤统计结果显示,由于t1提前扰动量对车速的影响很小,所以当t1在[-0.08,-0.03)范围内扰动时,仅24 个案例中HIC15增大。但如图10所示,t1扰动提前量越大,HIC15增大案例越多。因此,t1越早于头车碰撞时刻,则车辆所致行人头部损伤风险越有增大趋势。当t1在[-0.03,0.1]范围内扰动时,控制制动组HIC15均等于完全制动组,表明此区间内车辆所致行人头部损伤不受t1扰动影响。

图10 车辆所致行人头部损伤增大案例数
地面所致头部损伤结果(见图11)显示,t1在[-0.08,0.1]范围内扰动时,控制制动组HIC15的均值与中值均小于完全制动组。经统计,1 728 个t1扰动案例中,1 558 个案例(90.16%)的HIC15小于其对应的完全制动仿真案例;当t1无扰动时,96个控制制动仿真案例中,92 个案例(98.92%)的HIC15小于其对应的完全制动仿真案例。利用Jonchheere-Terpstra 检验对[-0.08,0.1]内的19 组HIC15进行显著性检验,检验结果P=0.000<0.05,可知不同t1扰动时刻的HIC15有显著性差异。结合图11的中值、均值线性拟合曲线,t1越晚于头车碰撞时刻,利用车辆制动控制方法降低行人头地碰撞损伤的效果越差。

图11 不同t1扰动时刻HIC15均值、中值和线性拟合曲线
上述结果表明,就地面所致头部损伤HIC15而言,在t1扰动下,虽然控制制动组部分案例HIC15升高,但仍可保证90.16%的案例中HIC15低于对应的完全制动案例,说明所研究的制动控制方法能很好地抵抗t1的扰动;但应该控制t1提前扰动量,从而减小车辆所致HIC15增大的风险。
2.3 t1扰动对行人落地姿态的影响
图12 给出了完全制动、无扰动控制制动和t1扰动下行人落地机制分布比例,本研究中1 920次仿真未出现M5.1、M5.2 两种落地姿态。控制制动案例中,M2、M3 落地机制占比较完全制动组大幅增加,M1、M4 占比大幅降低。Crocetta 等[22]指出M1、M4 的行人头地接触速度、旋转角度显著高于M2、M3,意味着M1、M4 可能会比M2、M3 造成更大的头地碰撞损伤。将1 920个仿真案例按照落地机制分组,并利用Jonchheere-Terpstra 检验方法对各组案例的HIC15、头地垂直碰撞速度(vz)进行显著性检验,两次检验结果P=0.000<0.05,可知不同落地机制下HIC15分布、vz分布均具有显著性差异。由HIC15、vz箱型图可知(见图13 和图14),M1、M4 对应的HIC15、vz的绝对值整体上分别显著高于M2、M3,证实M1、M4会比M2、M3 造成更大的头地碰撞损伤,此发现进一步印证了控制制动是通过影响行人落地姿态而降低人地碰撞损伤的结论。经统计,1 728 个扰动案例中,仅156 个案例(9.03%)行人落地机制较对应的无扰动案例发生变化,结合图12(b)和图12(c)可知,t1扰动对行人落地机制分布影响程度较小。
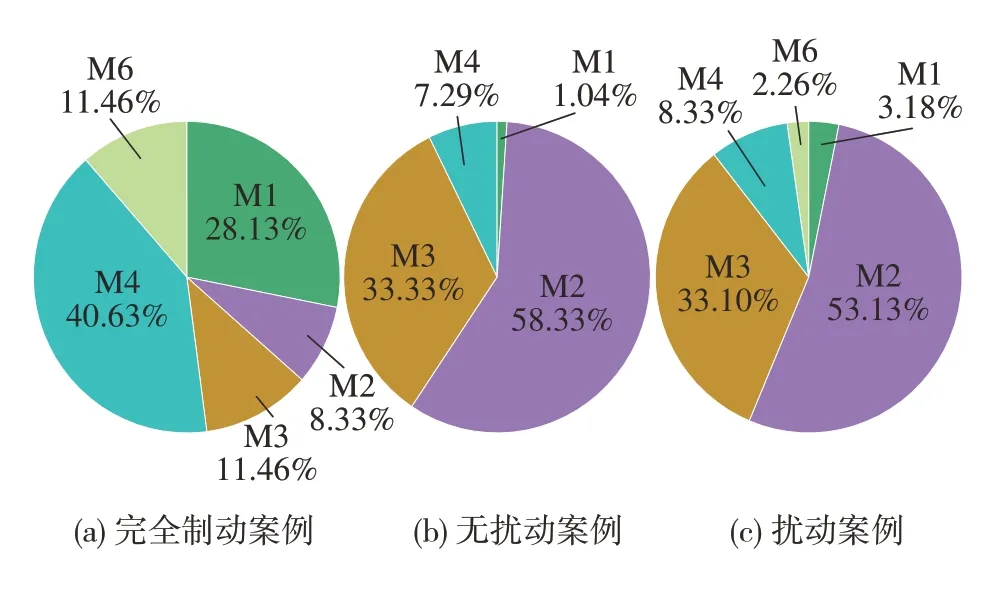
图12 行人落地机制分布
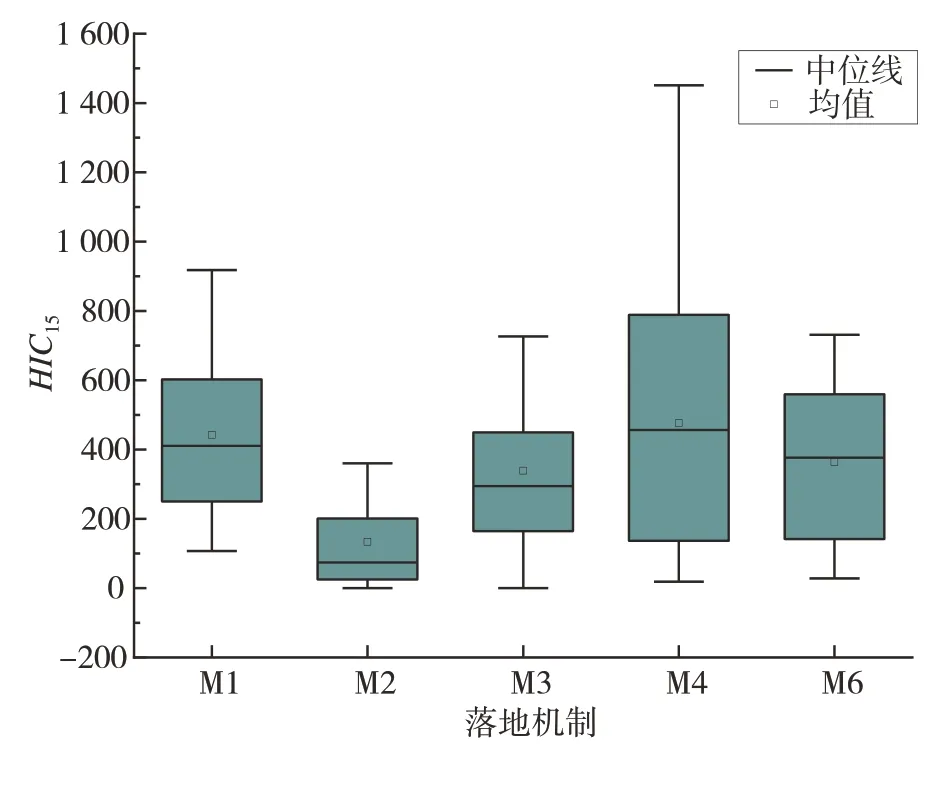
图13 5种落地机制下HIC15
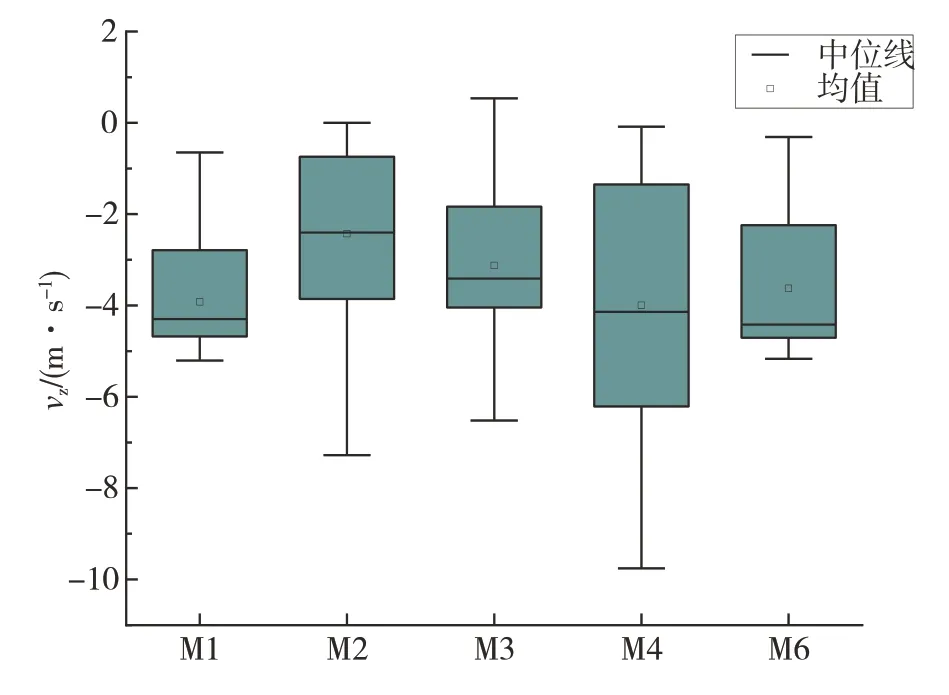
图14 5种落地机制下头地垂直碰撞速度
156 例落地机制发生变化的仿真案例中,有142例发生在[0.01,0.1]的扰动区间内。通过观察行人落地姿态发现,t1越晚于头车碰撞时刻,行人落地旋转角度就越大。如图15所示,当t1无扰动时,该仿真案例行人落地时首次触地部位为下肢,落地机制为M2;而当t1发生扰动且越晚于头车碰撞时刻,行人落地旋转角度越大,落地时首次触地部位变成头部,落地机制变为M1。因此,与无扰动案例相比,头部损伤风险增大。这亦说明,t1越晚于头车碰撞时刻,利用车辆制动控制方法降低行人头地碰撞损伤的效果越差。

图15 t1扰动0、0.05、0.1 s(小轿车,21 km/h,5th%男性,100%步态)行人首次触地时姿态
总体而言,t1扰动对行人落地姿态的影响较小,但t1若晚于头车碰撞时刻,与无扰动案例相比,部分案例会出现行人落地旋转角度增大,从而导致头地碰撞损伤风险增大的趋势。
3 讨论
由结果可知,t1扰动下,制动控制方法虽在个别案例中会增大行人受伤风险,但总体抗扰性强。大轿车、大型SUV、小轿车、小型SUV 的车辆制动控制方法有效率分别为94.4%、100%、100%、50%,WIC总体降幅12.80%;19 组控制制动组的HIC15中值与均值均小于完全制动组;行人落地姿态总体上不受t1扰动影响。但如文献[17]所述,为提高技术的接受度,需降低其风险。但仿真结果显示,尚有259 个案例(占比14.20%)中人体损伤增加,其中原因须特别关注。与大量研究[11-12,14]结论类似,车型对制动控制方法在t1扰动下的人地碰撞损伤防护效果影响显著,故须寻找车型参数对制动控制方法抗扰能力的影响规律。
3.1 制动控制方法失效案例原因分析
1 824 个控制制动仿真案例中,25 个案例(1.37%)车辆所致人体损伤增加,其中24 个案例头部损伤增加,1 个案例骨盆损伤增加。头部损伤增加的原因是t1早于头车碰撞时刻,车辆以更大的速度撞击头部,导致头部在第1 次与车辆撞击中受到的伤害增大;骨盆损伤增加的原因是行人第2 次与车辆接触所致。如图16 所示,该仿真案例中,行人被撞击至高空后,在重力作用下,行人二次撞击车辆发动机罩盖,此时车辆对行人造成二次伤害。上述失效案例均发生在[-0.08,-0.03)的扰动区间内,表明在控制车辆制动过程中为确保不提高车辆所致伤害,不能过早松开制动;同时也表明t1在[-0.03,0.1]范围内扰动时,车辆所致人体损伤不会增大。

图16 仿真案例中(t1扰动-0.04 s,小轿车,41 km/h,5th%女性,50%步态)行人被撞击后的运动过程
1 824 个控制制动仿真案例中,共有237 个案例(12.99%)的地面所致损伤增加,具体情况如下。
(1)59 个案例(24.89%)中,车人第2 次接触时,车头前沿与人体头、胸部接触。此类案例中人车再次接触虽然不会对行人造成二次伤害,但这一过程不仅未能有效消耗人体下坠能量,还时常改变人体落地姿态从而使其头部与地面产生更大撞击。如图17 所示,该案例中,车头前沿与人体头部接触后,行人头部朝下并以更加垂直地面的姿态落地,导致头部损伤增大。这与文献[15]中的发现一致,说明在实施制动控制过程中,随着车载监控设备的升级,在一些案例中可以尝试对车辆进行加速控制以避免此种现象。

图17 仿真案例中(t1扰动-0.07 s,小型SUV,31 km/h,5th%女性,50%步态)车头前沿与人体头部再接触后行人落地姿态的变化
(2)52 个案例(21.94%)中,其对应的13 个完全制动案例地面所致损伤已经接近于零,任何行人落地姿态的改变都只会增加而非降低损伤。图18 所示案例,完全制动情况下,行人下肢、臀部首先触地,头部最后触地,此时HIC15=0;而在对车辆实施制动控制后,行人头部首先触地,进而导致头部损伤增大。此原因与文献[15]中的发现一致,这说明不可能获得100%降低人地碰撞损伤的制动控制方法,后续研究中须探索人地碰撞损伤风险预测方法,以将制动控制方法更高效地应用到须降低人地碰撞损伤的案例中去,据此降低风险并提升效率。
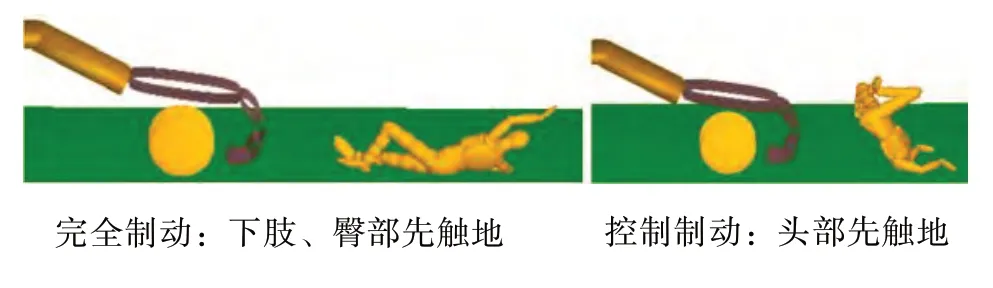
图18 仿真案例中(t1扰动0.03 s,大轿车,31 km/h,90th%男性,50%步态)行人首次触地时姿态
(3)50 个案例(21.10%)中,控制制动显著改变了人体不同部位的落地顺序。如图19 所示,该仿真案例中,完全制动情况下行人下肢首先触地;而在控制制动情况下,行人在车辆作用下旋转270°,最终顺着发动机罩盖脱离车辆而导致其头部首先触地,进而导致头部损伤增大。这要求后续研究中须加强研究人体运动姿态预测技术和车头对人体运动学响应的影响规律,以确保按需实施制动控制且可依托其他技术手段(如车头的变化)去改善人体的落地姿势,进而降低人地碰撞损伤。

图19 仿真案例中(t1扰动-0.03 s,小型SUV,41 km/h,50th%男性,100%步态)行人在车辆作用下旋转270°,头部首先触地
(4)30 个案例(12.66%)中,如图20 所示,因车人长时间不分离,导致车辆一直载着人向前运动,虽不会对行人造成碾压,但也增加了行人地面损伤风险。图示仿真案例中,完全制动情况下,行人脱离车辆时头部速度为5.8 m/s;添加控制制动后,因车人长时间不分离,导致行人脱离车辆时头部速度为7 m/s,从而增大了人地碰撞损伤的风险。这与文献[15]中的发现相同,针对此类现象,可设计一些装置阻止人体落地,进而从根本上避免人地碰撞损伤。
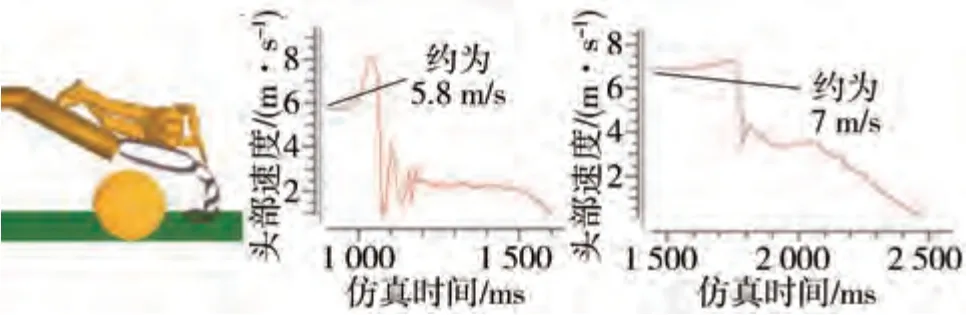
图20 该仿真案例中(t1扰动-0.03 s,小轿车,31 km/h,5th%男性,100%步态)行人脱离车辆时头部速度
(5)26个案例(10.97%)中,车辆制动控制中,人体下肢与车辆前端再次接触而使人体产生一顺时针旋转加速度,进而该旋转速度会转变为人体头部与地面的垂直撞击速度,从而加重人地碰撞损伤。如图21 所示,该仿真案例中,完全制动情况下,行人被车辆撞击后脱离车辆,头部落地时垂直速度为-8.11 m/s;控制制动中,行人下肢与车辆前端再接触,导致人体旋转角度增大且头地垂直碰撞速度为-9.31 m/s,从而增大了头部损伤风险。这类情况与文献[15]和本研究中发现(1)类似,均表明在研究中可考虑适度加速,使车辆接住行人大部分躯干,从而让人体沿着车辆滑落,以避免此种情况出现,但何时加速、加速多少、何时再减速是一个极具挑战且有伦理风险的问题,需小心应对。

图21 仿真案例中(t1扰动0.03 s,小型SUV,41 km/h,5th%女性,50%步态)控制制动情况下人体下肢与车辆前端再次接触
(6)20 个案例(8.44%)中,行人从车辆一侧落地,在与车头特别是发动机罩盖侧沿接触时产生一个明显向车辆侧边旋转的加速度进而使人体头部以更快速度撞击地面,从而导致人地碰撞损伤增加。图22 所示仿真案例中,车辆制动控制下行人从车辆一侧落地,其头地碰撞时,头部质心加速度高于完全制动,而其HIC15由532 增大至911。这与文献[15]中的相关发现一致,均表明在实施制动控制过程中人体从车辆侧沿坠落地面具有增加地面伤的极大风险,这要求在后续研究中关注车头形状设计以确保人体不从车体两边坠落。
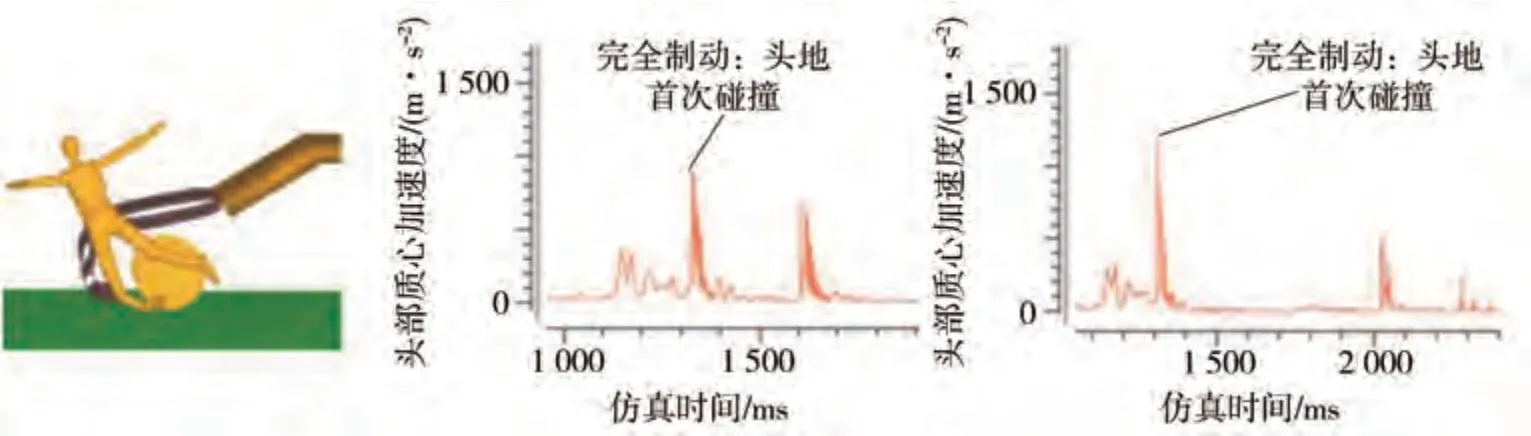
图22 仿真案例中(t1扰动-0.02 s,小型SUV,41 km/h,50th%男性,50%步态)人地碰撞头部质心加速度曲线
3.2 车型参数对制动控制方法抗扰能力的影响规律分析
利用Spss 软件中的Spearman 相关系数分析法对76 组ΔWIC(19 组t1×4 种车型)与车头各参数的相关性进行检验。以大轿车为例,参照文献[22]中车头参数组成,选取的车头各参数如图23 所示,图中,H1为保险杠底端距地面高度,H2为保险杠顶端距地面高度,H3为发动机罩盖低端距地面高度,H4为前挡风玻璃底端距地面高度,a为保险杠长度,b为发动机罩盖长度,r1为发动机罩盖倾斜角,r2为前挡风玻璃倾斜角。
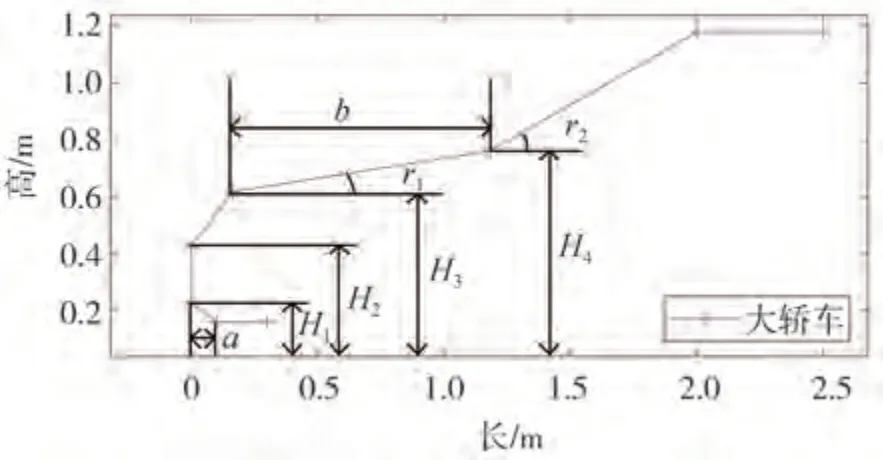
图23 车头参数选取
分析结果见表2,相关系数绝对值是0.2~0.4时为弱相关,0.4~0.6 时为中等程度相关,0.6~0.8 时为强相关。车头参数中,保险杠底端距地面高度、保险杠顶端距地面高度、发动机罩盖低端距地面高度、前挡风玻璃底端距地面高度、保险杠长度、发动机罩盖长度和发动机罩盖倾斜角7 个参数相关性显著。ΔWIC与保险杠长度具有高度负相关关系,与发动机罩盖倾斜角中等程度正相关、与其余5 个车头参数均为弱相关。上述结果表明,车头参数中,保险杠长度、发动机罩盖倾斜角对制动控制方法的抗扰动能力影响较大,保险杠长度越小、发动机罩盖倾斜角越大,制动控制方法的抗扰动能力越强。本研究所采用的小型SUV 的保险杠长度是小轿车的2.6倍,发动机罩盖倾斜角也小于小轿车,因此,t1扰动下小型SUV行人损伤防护效果最差。

表2 ΔWIC与车头各参数相关系数
4 结论
通过1 920 次(完全制动组96 次、控制制动组1 824 次)仿真实验,运用对比分析等方法获得以下结论。
(1)仿真结果证实车辆制动控制方法在无参数扰动时能够有效降低人地碰撞损伤且不增加车辆所致人体损伤,大轿车、大型SUV、小轿车、小型SUV撞人事故中地面所致人体损伤费用降低幅度分别为60.22%、43.35%、83.62%、70.09%。表明通过控制车辆运动去降低人地碰撞损伤具有可行性。
(2)t1扰动时,相较于完全制动案例,86.1%控制制动组WIC降低,98.61%案例中车辆所致HIC15不变,90.16%案例中地面所致HIC15降低;相较于无扰动控制制动案例,90.97%案例中行人落地姿态不变。表明车辆制动控制方法具有很强的抗t1扰动能力。
(3)t1越早于头车碰撞时刻,车辆所致行人头部损伤增大案例越多;t1越晚于头车碰撞时刻,利用车辆制动控制方法降低行人头地碰撞损伤的效果越差。虽然制动控制方法总体抗扰能力很强,但在t1扰动下如何不增加车辆伤并维持地面损伤防护效果,依然值得后续深入研究。
(4)仿真结果显示,t1扰动下人地碰撞损伤增加的主要原因有人车长时间不分离、人体从车体边缘掉落、落地姿态改变、完全制动组中伤害已经极低等。表明为提高制动控制方法的鲁棒性,针对具体问题应该有更细致的解决方案。但结果亦显示,可能无法找到一种100%降低地面伤的方法。
(5)进一步分析发现,保险杠长度、发动机罩盖倾斜角等参数显著影响制动控制方法的抗扰动能力,其中保险杠长度越小、发动机罩盖倾斜角越大,制动控制方法的抗扰动能力越强。这一发现可以指导人们设计更能抵抗t1扰动的车头,从而降低制动控制方法的使用风险。
猜你喜欢
基层中医药(2021年1期)2021-07-22 06:56:44
意林(2021年5期)2021-04-18 12:21:17
军事文摘(2020年22期)2021-01-04 02:16:38
扬子江(2019年1期)2019-03-08 02:52:34
证券市场红周刊(2018年21期)2018-05-14 23:11:03
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
天津医科大学学报(2015年2期)2015-12-22 09:24:34
中国卫生(2014年8期)2014-11-12 13:01:02
浙江人大(2014年1期)2014-03-20 16:20:02
上海理工大学学报(2012年2期)2012-03-20 13:54:30
