飞机机身油箱晃动数值仿真分析
2023-03-06 02:56:38王芳丽朱亲强张宪政童明波
科技创新与应用 2023年5期
秦 浩,王芳丽,2,3,保 鑫,朱亲强,张宪政,童明波*
(1.南京航空航天大学,南京 210016;2.金陵科技学院,南京 211169;3.中国特种飞行器研究所,湖北 荆门 448035;4.航空工业江西洪都航空工业集团有限责任公司,南昌 330024)
油箱晃动属于流固耦合问题。目前有众多学者对油箱晃动问题进行了大量的研究。叶休乃[1]对油箱晃动和振动试验进行了研究,确定了油箱晃动和振动的试验要求和方法。刘富等[2]对贮箱液体晃动和结构防晃进行了研究。闵朗等[3]使用VOF法研究了防晃板对油箱晃动的影响。张丽娜[4]对直升机油箱在不同飞行状态下的油液晃动进行了研究。方雄等[5]研究了盘旋状态下油箱晃动对油箱结构安全性的影响。杨尚霖[6]对机动飞行时油箱晃动进行了研究。韦杰创[7]对油箱晃动和油箱的振动疲劳特性进行了研究分析。赵博伟等[8]研究了机翼油箱晃动。唐浩等[9]对导弹油箱晃动进行了研究分析。杨瑞[10]利用ALE方法对机翼油箱晃动的影响进行了研究。
目前的油箱晃动研究主要以简单几何和简化的内部结构布局为主,其流固耦合仿真结果难以较好地反映实际情况下飞机油箱晃动特性,并且针对复杂机身油箱的油箱晃动研究较少。因此,针对此问题,本文以某飞机机身完整结构模型为研究对象,采用有限元软件LS-DYNA,建立机身油箱的有限元模型。基于SPH方法对机身油箱晃振进行数值仿真分析,研究了不同运动状态和不同充液比对油箱重心变化的影响。
1 数值计算方法
1.1 控制方程
流体流动的基本方程包括质量守恒方程、动量守恒方程。质量守恒方程又叫连续性方程,通过流体微元控制体推导得来,流体微元在三方向的质量流量总和等于流体微元质量随时间的变化量,其形式为[8]
式中:ρ为密度;t为时间;ν为速度张量;x为距离;β为坐标系方向。
动量方程的定义为在单位时间内流到控制体动量与作用在控制面和控制体的外力之和等于控制体动量增加,其形式为[8]
式中:ν为速度张量;t为时间;σ为总应力张量,包括各向同性压力和黏性应力;x为距离;F为体力;α为坐标系方向;β为坐标系方向。
对油箱晃动进行动力学分析时,其动力学方程为[11]
第二,拓展财务管理的空间。财务管理人员通过网络信息技术,将财务资源统一地进行集中管理,大量的财务数据开展集中的处理,有利于企业的财务管理工作的开展,便于企业调配资金开展经营活动,继而提升企业资金的利用率。同时,会计信息化将财务内部资源进行整合,使得管理者能够一目了然,以此使得企业财务资金得到做到最大的效用。
式中:M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;F(t)为力矢量。
1.2 SPH方法
SPH方法是一种无网格纯Lagrange方法,广泛应用于流固耦合问题。SPH方法的核心思想是用粒子来离散问题域,用积分表示场函数,用粒子近似核函数。通过对一定区域的粒子累加求和,代替场函数和场函数的导数的积分表达形式。SPH方法被广泛应用于流体动力学问题,用来处理大变形,如波浪破碎和自由表面问题。SPH方法主要包含2步:第一步为场函数近似法,第二步是粒子近似法。
场函数核近似化:使用积分表示函数对任意函数和光滑函数积分,变量场的连续函数的积分形式表示为[12]
式中:f(x)为变量场坐标x的函数;δ(x-x′)为狄拉克函数。
采用光滑函数W(x-x′,h)代替狄拉克函数,则f(x)的表达式可以转换为[12]
式中:h为光滑函数影响区域的光滑长度。
场函数粒子近似:粒子近似是对近似场函数的空间导数和SPH核近似法的连续积分表达式转化为支持域内所有粒子叠加求和的离散化形式。粒子i处的函数的粒子近似式写为[12]
式中:ρj为粒子密度;mj为j处粒子质量。
该式表明,任一粒子处的函数梯度可以用光滑函数的梯度对支持域内所有粒子的函数值的加权平均得到。
1.3 流固交界面
对于油液和油箱的接触,在LS-DYNA使用自动点面接触,将SPH粒子作为从接触,油箱结构作为主接触。LS-DYNA中的接触算法为罚函数法[12],该接触算法原理是当节点碰到目标表面时,接触发生,将罚函数和界面穿透量的乘积作为接触力。
同时,SPH方法采用人工黏度防止SPH粒子穿透,通过在结构边界上分布虚粒子来对临近的粒子产生作用力,防止边界上的粒子穿透,虚粒子和临近的粒子之间的作用力沿着粒子中心连线。
2 机身油箱建模
2.1 模型验证
为了验证SPH方法用于计算的可靠性,进行了算例验证并与试验结果进行了对比,该试验如图1所示。试验为1个水箱,水箱由2道墙组成,其中右边的墙为刚性墙,左边的墙上方为刚性墙,下方为橡胶板。橡胶板的上端与刚性墙固接在一起,下方为自由端,其中H代表液面高度,L为橡胶板高度。试验与仿真对比图如图2所示。通过SPH方法来模拟水流流动从而获得弹性橡胶板自由端位移、液面高度与时间变化曲线,并与试验对比,如图3所示。
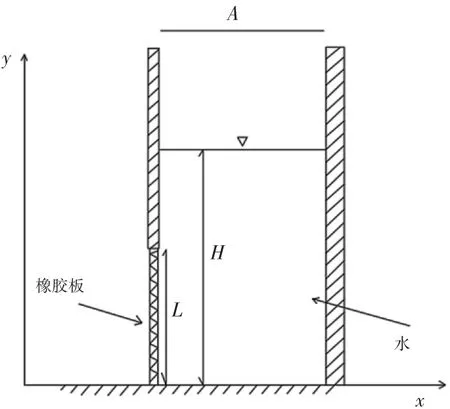
图1 水箱结构正视图
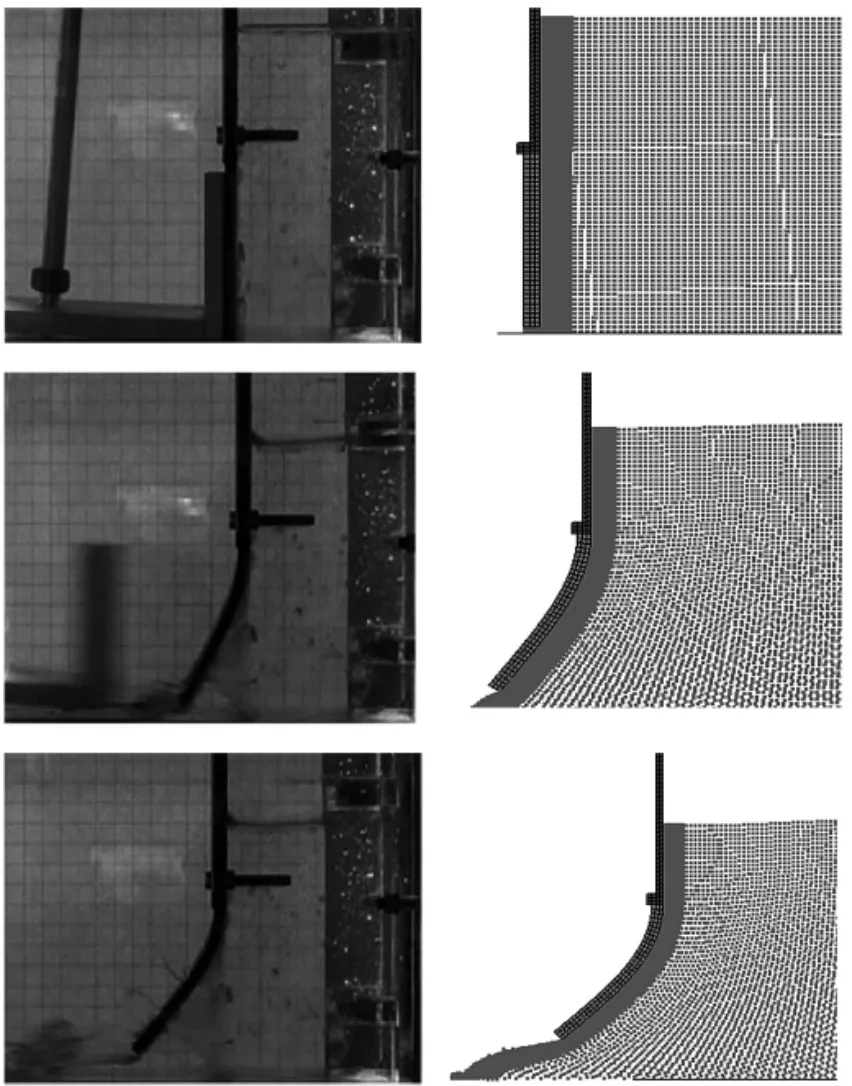
图2 试验仿真对比图
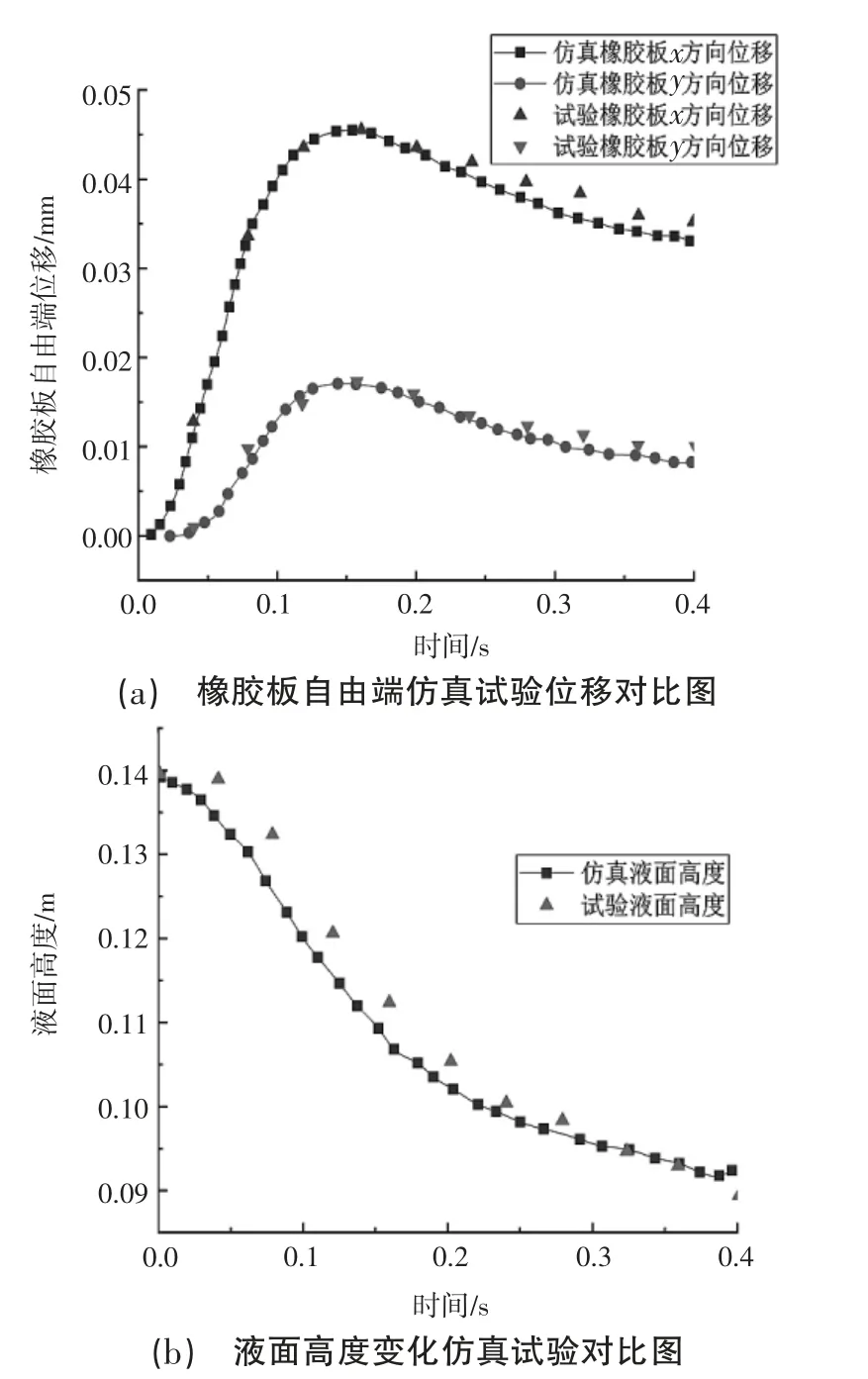
图3 橡胶板自由端与液面高度仿真试验对比图
2.2 模型参数
机体坐标系的原点位于飞机质心,以机身纵轴为x轴,指向机尾为正。以垂直于机身为y轴,向上为正。z轴的方向通过右手法则确定,x轴方向为纵向,y轴方向为垂向,z轴方向为横向。由于油箱厚度方向尺寸远小于其他方向尺寸,将其简化成为壳体模型,采用壳单元对机身油箱进行网格划分。飞机油箱结构主要由蒙皮、隔框、加强筋和油箱壁板等部件组成。油箱结构采用壳单元进行模拟,蒙皮与隔框、油箱盖板与油箱壁板之间采用共节点连接。机身油箱的有限元模型如图4所示。
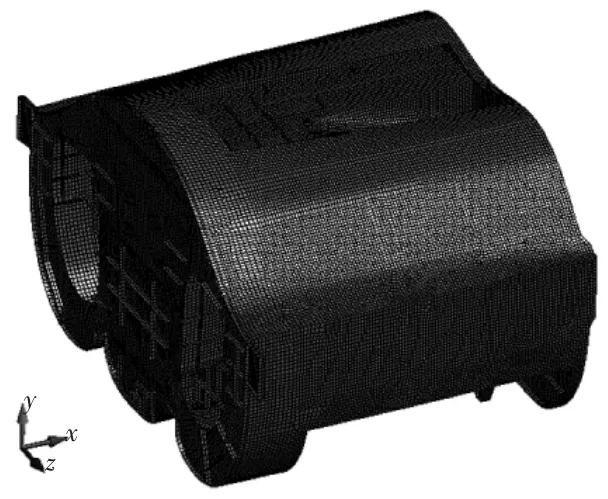
图4 油箱整体视图
利用SPH粒子模拟燃油,燃油参数见表1。

表1 燃油参数
在飞机质心处建立质心点,将质心点与机身油箱耦合,运动激励施加在质心,通过耦合将运动传递到机身油箱上。在机身油箱晃动中,对机身油箱晃动加载采用角度-时间曲线,振动加载采用位移-时间曲线。外部激励作用时间3s。油箱晃动方程为
振动方程为
2.3 仿真工况
工况确定的依据是HB6757—1993《飞机燃油箱晃动和振动试验要求》[13]。HB6757—1993《飞机燃油箱晃动和振动试验要求》中规定对于金属油箱,油箱振动幅值为0.80+0.05mm。对于油箱的晃动,晃动的总角度为30°。对于油箱的油量,标准中规定应该在油箱中注入2/3的燃油。其中,工况一为振动工况,工况二为俯仰工况,工况三为滚转工况。其中,工况二和工况三属于晃动工况。为了研究充液比对油箱晃动的影响,对于工况二和工况三,分别设置了2种不同充液比对其进行计算,工况说明见表2。

表2 油箱工况表
3 结果分析
3.1 不同运动状态对油箱重心影响分析
不同运动状态下油箱在三方向重心变化量如图5所示。油箱关于XOY平面对称,对于振动工况,油箱振动作用加载方向为横向,因此油箱沿着横向运动,但是油箱重心在横向变化范围幅度很小,这是由于所施加的振动激励函数幅值较小引起的,重心在横向变化量与振动激励加载幅值呈正相关,由于在机身垂向和纵向没有加载运动激励,因此油箱重心在垂向和纵向变化量不大,几乎为零。俯仰工况和滚转工况在三方向上重心的变化情况呈现出正弦运动规律,主要是因为油箱是按正弦运动运动加载曲线驱动转动导致的。对于俯仰工况,油箱绕横轴运动。油液在横向变化几乎为零。但在纵向变化较大,变化范围为-37.3~33.7 mm,油箱重心在垂向变化范围为-22.6~10.1mm,因此对于俯仰工况,重心在纵向的变化远大于在垂向方向的变化量,俯仰运动对油箱重心纵向变化影响较大。对于滚转工况,油箱绕纵轴运动,油液在纵向变化可以忽略不计,油箱重心在横向变化范围为-35.3~35.1mm,油箱重心在横向变化峰值对称,这是因为油箱结构关于XOY面是对称的。油箱重心在垂向变化范围为-5.7~0mm,油箱在垂向变化的峰值为5.7mm,相比横向重心变化较小,因此在滚转运动时,横向重心变化量显著大于垂向变化量。
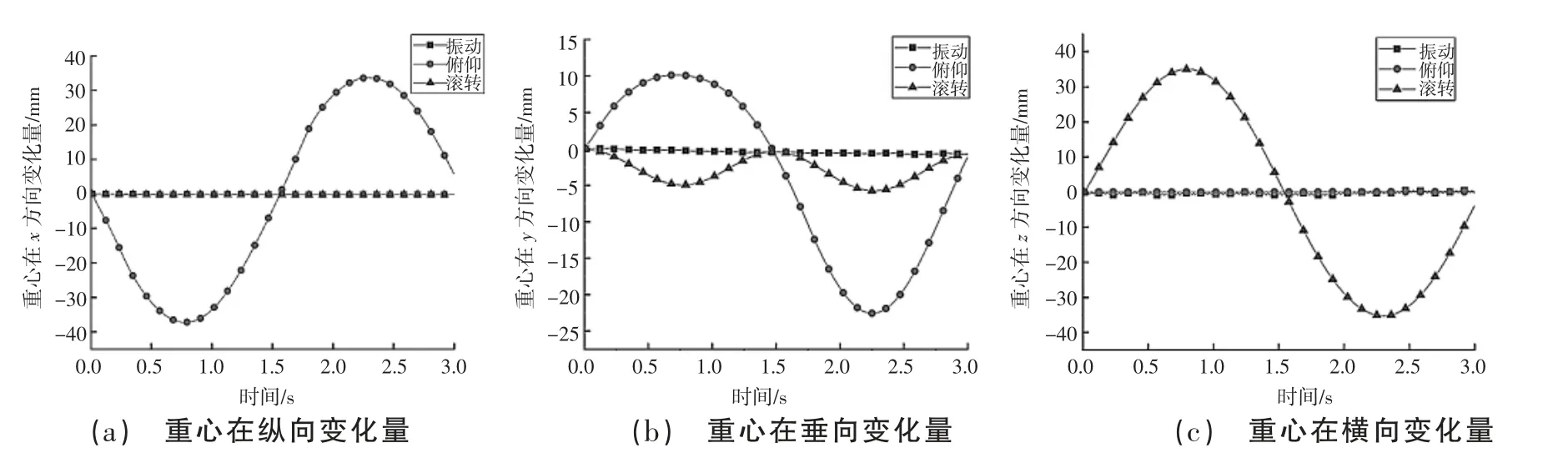
图5 不同运动状态重心变化
3.2 不同充液比对油箱重心影响分析
为了研究充液比对油箱重心的影响,考虑油箱俯仰和滚转运动,改变油箱的充液比,对油箱进行数值仿真计算,每组中油箱的充液比分别为30%、67%和95%。
不同充液比油箱的俯仰和滚转运动重心的变化分别如图6和图7所示。对于俯仰情况,由于油箱绕横轴转动,油液在横向分布变化不大。油箱重心的变化主要体现在纵向和垂向。并且随着充液比的提升,重心变化量有所上升,但在对应纵向和垂向方向上重心变化的趋势大体保持一致。对于滚转情况,由于油箱绕纵轴运动,油液在纵向晃动幅度变化不大,油箱重心在纵向的变化量可以忽略。油箱重心主要在横向和垂向变化较大,并且在相同的运动激励函数作用下,随着充液比的提高,重心变化曲线的变化趋势也是大体保持一致,只是峰值有所变化,重心变化峰值随充液比的提高而提高。
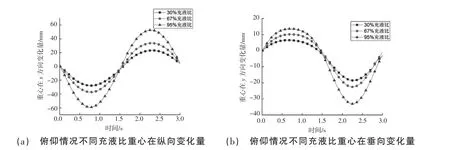
图6 不同充液比俯仰运动油箱重心变化
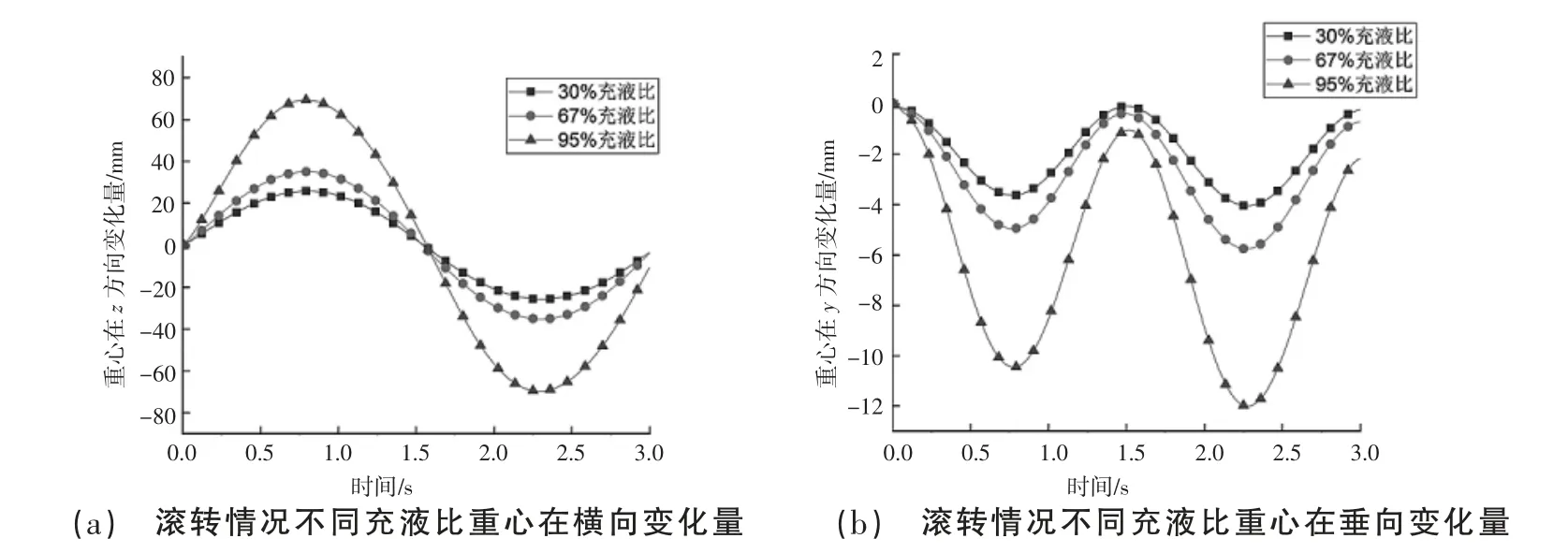
图7 不同充液比滚转运动油箱重心变化
通过不同充液比油箱的重心变化对比可以得出以下结论:①在相同的运动条件下,随着充液比的增加,油箱重心变化量也不断增大,并且重心变化在对应方向上的变化趋势大体一致。②油箱在俯仰运动状态下重心变化量大于滚转情况下油箱重心变化量。俯仰运动对于飞机重心变化影响较大。因此在飞机做俯仰机动动作的时候要重点考虑由于俯仰运动带来的重心变化影响,为了减少因为油液晃动造成的油箱重心变化,可以在油箱内增加如防晃挡板的防晃装置[14],从而防止飞行过程中重心变化过大导致的不稳定,进而增强飞行稳定性。
4 结论
本文基于SPH方法,利用LS-DYNA对某飞机机身油箱晃动进行了数值仿真,得出了以下结论:①对于振动、俯仰和滚转3个工况来说,振动情况下重心变化量与振动幅值呈正相关,且油箱重心变化与振动加载方向相关,在其他方向上的重心不受到影响。俯仰情况下,重心在横向几乎为零,在纵向和横向的变化较大,并且纵向变化量远大于垂向。滚转情况下,重心在纵向变化可以忽略不计,滚转运动主要影响飞机在横向和垂向方向的重心,并且横向变化量远大于垂向。②对比了不同充液比油箱的俯仰与滚转。结果表明,随着充液比的增加,油箱在晃动过程中的重心变化也越明显,并且在相同的运动激励作用情况下,重心变化趋势大体一致,只是变化量峰值有所提升,从数值仿真结果可以看出,充液比越高,油箱晃动时重心变化越大,因此对于满油状态的飞机在飞行过程中的影响要大于少油情况下飞机的稳定性。因此在油箱内部设计如防晃板之类的防晃结构,如横向防晃板和纵向防晃板[12,14],从而可以减少飞机在做机动飞行过程中的油液晃动程度,从而提高飞机的飞行稳定性。③通过数值仿真计算,可以看出俯仰情况对重心变化的影响大于滚转工况对重心变化的影响。因此,飞机在飞行过程中应该重点关注俯仰运动。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:35:04
锻压装备与制造技术(2021年2期)2021-07-19 08:51:00
重型机械(2020年3期)2020-08-24 08:31:40
空间科学学报(2020年3期)2020-07-24 09:23:26
汽车维修与保养(2020年11期)2020-06-09 05:42:10
贵州农机化(2019年1期)2019-01-08 10:25:03
中国军转民(2017年9期)2017-12-19 12:11:40
设备管理与维修(2015年11期)2015-03-16 05:57:21
乡村科技(2015年15期)2015-02-20 18:53:25
应用化工(2014年1期)2014-08-16 13:34:08