
一种基于3×3 光纤耦合器的短距离光纤频率传递的噪声抑制方法
2023-03-06 06:17胡珍源岳耀笠张颜艳高帅和杨西光眭明潘志兵张首刚李阳
光子学报 2023年1期
胡珍源,岳耀笠,张颜艳,高帅和,杨西光,眭明,潘志兵,张首刚,李阳
(1 中国科学院国家授时中心,西安 710600)
(2 中国科学院大学,北京 100049)
(3 中国电子科技集团第三十四研究所,桂林 541004)
0 引言
原子钟组可以产生频率稳定度极高的频率信号,在科研、生产、生活各方面都有着广泛的应用。近年来原子钟性能指标不断提升,铯喷泉原子钟的不确定度已经达到10-15量级[1],光钟系统的不确定度已经达到10-19量级[2]。原子钟性能提高,对时间频率信号比对的性能要求也相应提高。目前,远距离的时间频率比对,有无线和有线两种方式。无线方式主要通过射频链路[3]或激光链路[4]进行;近年来有线方式中使用光纤直接传输微波或光学频率信号的方法也取得了进展[5-15]。
采用无线比对时,将钟组产生的频率信号传递到射频或激光比对设备的这段路径一般采用有线方式。在这一部分,传统的方法是采用稳相同轴电缆传输射频信号。这段路径上通常存在温度变化、振动等环境因素,这些因素会影响传输电缆或光纤的长度,进而影响传输信号的频率稳定度。
目前,卫星与地面站之间的时间频率比对全部采用无线的方式进行。星上原子钟与星上对地比对链路设备间需要信号稳定传输。有些情况下,例如空间站实验舱内原子钟到舱外比对设备之间的距离约30 m 长。电缆和光纤的温度系数一般都在1×10-5/℃量级,传输距离为30 m 时,直接使用电缆或光纤传输频率信号,要求线缆上的频率稳定度的附加噪声优于钟的稳定度,对温度控制要求比较高:假如要满足1×10-15@1 s、1×10-18@1 day 的稳定度水平,对应的电缆上信号延迟变化需要小于1 fs/s、86 fs/day,对应线缆长度变化需要小于0.3 μm/s、25.8 μm/day,如果只通过温度控制进行噪声抑制,在30 m 长度的线缆上,需要整段线缆的温度变化小于0.001 ℃/s、0.086 ℃/day。对整段线缆进行这种精度的温度控制,工程上实现有较多困难。
为了应对精密控温难以实现的问题,本文研究了通过测量线缆长度获得时延量后对延迟进行补偿的方法。在钟组和比对设备间使用光纤传输信号,测量信号接收设备端反射的信号,连续实时测量线缆长度,并通过延迟补偿器件对光纤长度进行实时补偿,抑制光纤上的噪声。目前在地面系统中使用光纤进行频率信号传递,通常采用测量接收端的反射光信号来计算光纤延迟变化以进行噪声抑制。常用方法中,将携带有频率信息的光信号分两路,一路用作本地参考,另一路通过光纤传输至接收设备。接收设备接收端的端面反射光沿光纤返回后经过环形器等器件,与本地参考光进行干涉测量。上述方法需要将一部分光信号分光后作为参考,有一定的功率损失,并且在路径上光纤连接器较多的应用中,对反射返回光的功率大小也有要求。系统中使用的光梳功耗等资源有限,输出光功率为40 mW,在接收端希望接收到的光信号功率尽量大的情况下,希望使用不同于光梳光信号波长的另外一个波长的激光对光纤的长度进行干涉测量,同时光梳的脉冲激光仅用作频率信号传递,以减小功率损失。基于以上思想,本文设计了频率传递系统,该系统基于3×3 光纤耦合器干涉仪[16-19],使用条纹计数法实时取得光纤长度变化数据,通过压电陶瓷(Piezoelectric ceramics,PZT)和半导体制冷器(Thermo Electric Cooler,TEC)控制光纤长度进行补偿,并开展了实验研究。
1 总体系统
该频率传递系统主要包含辅助激光器、4 个干涉仪、探测和控制电路、PZT 和TEC 控制温度的光纤组成。图1 是系统的光路示意图。

图1 系统光路示意图Fig.1 System optical path diagram
1 550 nm 波长的激光是光梳的飞秒脉冲激光,重复频率fr锁定后用于传递频率信号。光梳的脉冲光作为光源,经过a段光纤、波分复用器(Wavelength Division Multiplexer,WDM)WDM1、b段光纤输入到主动补偿装置,在进行补偿后,经过g段光纤、WDM4、h段光纤,在信号接收端通过光电探测器(Photodiode,PD)PD9 探测得到电信号,获得光梳重复频率fr等频率信号。已经有研究表明光梳可以在空间及真空环境下运行[20]。
图1 深色虚线框内是整个主动补偿装置的光路示意。虚线框中的光路都位于主动补偿装置内。1 310 nm 波长的激光,是连续激光,用于测量光纤长度变化,线宽较窄以保证相干长度足够大。1 310 nm 波长的连续激光由补偿装置内的辅助激光器产生,经两级三个1×2 耦合器分路后,分别输入四个3×3 耦合器。四个耦合器分别与其所连接的光纤、反射镜等组成干涉仪。基于3×3 耦合器的干涉仪的原理将在2.1节具体说明。
图1 上方的两个干涉仪分别用来测量输入(a'bc段)和输出(efgh'段)光纤的延迟变化。两条测量臂上1 310 nm 激光分别经法拉第旋转反射镜(Faraday Rotation Mirror,FRM)FRM1 和FRM4 反射后返回耦合器并分别被PD1、PD2 和PD3、PD4 探测,测得干涉后光信号的强弱信息。
测量时,使用a'段替代a段光纤,h'段替代h段光纤,要求a和a'段光纤长度差尽量小,h和h'光纤长度差尽量小,用来减小测量误差。实验装置中这两组差的值均小于10 mm。同样的,d段光纤没有被测量,通过使(c−i)+(e−j)光纤长度尽量和光纤d长度一致,长度差控制在10 mm 以内的方式减小误差。当温度变化引起d段光纤长度变化时,同样在c、e、i和j段光纤上,温度变化会引起长度变化。当(c−i)+(e−j)光纤长度与d一致时可以抵消这一部分温度变化带来的影响。
图1 下方的两个干涉仪(浅色虚线框内)用于检测激光器频率漂移。光纤p、p'使用同一种温度延时系数(单位为ps/km/K,K 为开氏度)的光纤,光纤q、q'使用另一种温度延时系数的光纤。已知光纤的温度延时系数,同一位置放置的光纤温度变化近似相等时,可以求解激光器频率漂移,具体计算在3.2 节。
最后,测量光纤长度的变化和1 310 nm 激光的波长变化,由系统的嵌入式处理器计算得到需要给出的补偿量,通过电路控制补偿执行器完成补偿。
2 子系统
实验系统中主要的功能子系统包括两组干涉仪和一套控制电路及补偿执行器。第一组干涉仪测量光纤长度变化,第二组干涉仪测量1 310 nm 波长激光频率漂移,控制电路及补偿执行器完成对补偿量的计算和对光纤长度的控制补偿。
2.1 基于3×3 光纤耦合器的干涉仪
使用分光比为1∶1∶1 的3×3 光纤耦合器构造迈克尔逊干涉仪。以图1 左上方的干涉仪为例,1 310 nm波长的连续激光从3×3 光纤耦合器第1 端口接入,第4 端口接传输光纤(a'bc段)作为测量臂;第6 端口接短光纤后接法拉第反射镜作为参考臂;第5 端口空置。激光经传输光纤末端FRM1 和第6 端口的FRM4 反射后,分别由第4 端口和第6 端口输入光纤耦合器,并在第1 第2 第3 端口输出干涉后的光信号。在第2 端口和第3 端口接PD1 和PD2,能够探测到第2 端口和第3 端口的光信号的功率变化。功率每增大或减小一个周期,干涉条纹移动一条,两臂反射光相位差改变2π。通过第2 端口和第3 端口功率变化相互关系,解算干涉条纹移动方向[21]。系统使用法拉第反射镜是为了使干涉条纹稳定[22]。
使用2×2 光纤耦合器只能得到光纤长度变化,无法得到变化方向。使用3×3 光纤耦合器,通过两个PD 探测干涉信号强度,既可以得到光纤长度变化,又可以得到光纤长度变化方向。具体的分析如下。
在单极化分析中,沿光纤方向任意一个位置的电场可表示为
式中,光源频率是ω,复数E是沿光纤方向的位置函数。
在3×3 耦合器各个端口分别选取参考点,式(2)中E1~E6是端口1~6 上参考点处的电场,M3是耦合器的传输矩阵。3×3 耦合器传输矩阵表示为
每个输入和输出光纤端口都有个参考点,通过调整并适当选取各端口参考点的位置,使式(3)中的b、d、e、f和h是正实数。耦合器输入输出光的能量守恒,表示为
得到等价条件
矩阵是矩阵M3的埃尔米特共轭矩阵。把式(4)展开成关于矩阵各个元素的方程,得到包含13 个参数(矩阵里5 个实数元素每个对应1 个参数,4 个复数元素每个对应2 个参数)9 个条件的方程,因此可以用4 个参数表征3×3 耦合器的功率传输特性。这4 个参数,选取复参数a、c、g和k的模量较方便。
由式(5)导出的元素方程给出以a、c、g和k表示的实参数为
式(8)中ϕ是测量臂和参考臂信号间的相位差,如果改变光纤端口参考点的选取,会给该路信号带来一个恒定的相位差ϕp,但是这个相位差ϕp不会对输出口的功率P1、P2、P3带来影响,所以在此不讨论。如果两束功率分别为P4和P6,相位差 为ϕ的激光从3×3 耦合器的4、6 端口输入,耦合器1、2、3 端口输出的光的电场矢量表示为
矢量与其共轭矢量的积αα*是矢量模的平方,电场矢量模的平方与其功率成正比。
式(6)、(7)、(9)中,字母a、b、c、d、e、f、g、h和k表示矩阵M3中元素的模,式(9)中参数m是两束光偏振分析的归一化参数,一般的情况下,耦合器是保偏的,光纤是双折射的,从而有m<1。在完全对称3×3 耦合器中,矩阵M3的每个元素的模都是,这种情况下,ϕc-ϕa=120°并且ϕk-ϕg=-120°。
现实中光纤耦合器作为物理器件,并不是完全对称的,分光比达不到理想的1∶1∶1,矩阵M3的每个元素的模是一个近似的固定值,在这种情况下,ϕc-ϕa≈120°并且ϕk-ϕg≈-120°。实验系统中使用的光纤耦合器同侧三个端口输出功率的不一致性约为0.5 dB,系统正常工作。
使用3×3 耦合器而不是2×2 耦合器构造干涉仪,是为了同时获取4、6 两个端口的光功率数据,来测量光纤长度变化和方向变化。当两个端口上相位差不是严格的120°时,并不影响长度变化的计算和变化方向的判断。
试验系统中使用的光纤耦合器隔离度为≥55 dB,系统正常工作。光纤耦合器的隔离度等参数对系统性能的影响有待进一步试验研究。
耦合器的4 端口与6 端口所接光纤上的反射光信号的相位差ϕ每改变2π,P2、P3的幅值,即PD2、PD3 上探测到的光功率会有一个周期的变化。
测量光在真空中的波长为λ,光纤折射率为n。式(9)中,2、3 端口输出光的功率分别表示为一个恒定值Pc与一个余弦函数值Pa之和。一种较方便的计数方法是,取该恒定值Pc为计数阈值点,选取端口2 为主计数端口,从任意一个计数点开始,式(8)中ϕ每改变2π,即余弦函数过一个周期,光功率交变部分从0 增大到最大值后减小到0,然后继续减小到最小值后再增大到0。这个过程计数值为2,对应干涉条纹移动1 条,即测量臂光程对参考臂光程长度变化为。光信号在光纤中往返,光纤长度变化为光程长度变化的一半即λ2n。即计数值变化1 对应的光纤长度变化为λ4n,对应的时间延迟变化λ4c。联合2、3 端口输出功率值变化,通过计算,既可以得到测量臂光纤相对于参考臂光纤的长度变化,又可以得到长度变化的方向。测量光波长λ变化显然会影响计数结果和测量臂长度测量,其变化的影响和对应的修正方法将在2.2 节给出。
2.2 测量激光波长漂移的影响和补偿
系统中使用的1 310 nm 激光器存在频率漂移,以下对激光器频率变化对测量结果的影响进行分析。
传输光纤长度为L,迈克尔逊干涉仪的测量臂的光程为2L,测量激光中心频率为f,激光中心频率变化为Δf=f1-f2,设光纤长度不变,光纤纤芯折射率为n,激光中心频率变化引起的干涉条纹移动数量N满足
1 310 nm 激光的频率约为229 T Hz,当干涉条纹移动1 个周期时
又有L=100 m,(包括传输光纤30 m 和补偿模块等其他光纤70 m),如果仅通过激光器波长变化引起干涉条纹移动1 个周期,即条纹计数法的计数偏差为2,则对应测量激光的频率变化Δf为1 MHz,即激光器频率变化Δf为0.5 MHz 时,就会导致干涉条纹计数值偏差1。
实际系统中使用的是大族激光定制的激光器,1 310 nm 激光器线宽为9.5 kHz,由激光器线宽引起的测量误差小于0.01 个波长,对应光纤长度变化13.1 nm,对应时间延迟变化43.7 as。而激光器的频率漂移范围在100 s 内约为5 MHz,远超过0.5 MHz,必须对激光器频率漂移进行检测并将漂移数据参与计算以修正频率漂移的影响。
图1 中浅色虚线框中的两个迈克尔逊干涉仪用来检测激光器频率漂移,每个干涉仪测量原理与2.1 节中描述的一致。
FRM5、FRM6 与左侧的耦合器、PD5、PD6 组成了一个干涉仪,其两臂光纤p和p'产生的干涉条纹变化由PD5、PD6 探测;FRM7、FRM8 与右侧的耦合器、PD7、PD8 组成了一个干涉仪,其两臂光纤q和q'产生的干涉条纹变化由PD7、PD8 探测。光纤p、p'使用同一种温度延时系数,光纤q、q'使用另一种温度延时系数的光纤。这样,对应同样的环境温度变化,两个干涉仪上会有不同的干涉条纹变动,而对于测量激光波长变化,在两个干涉仪上也会产生不同的干涉条纹变化。对于每个光纤干涉仪,其测量臂与参考臂的臂长差等于测量光纤的长度。p、p'长度差记为L1,q、q'长度差记为L2。
假设光纤时延不变,即L1和L2都为恒定值,激光器从频率f1变化到频率f2产生的相干周期数量为
式中,λ1为激光频率f1对应的激光波长,λ2为激光频率f2对应的激光波长,N1和N2为包含小数部分的有理数,n为光纤折射率,c为真空光速,有c=λ1f1=λ2f2。
假设激光器工作频率为恒定值,即不产生频率漂移,测量光纤长度受温度影响产生相位漂移,测量光纤长度L1变化到,测量光纤长度L2变化到产生的相干周期数量为
式中,N3和N4为包含小数部分的有理数。
不考虑振动对光纤延时的影响的情况,光纤干涉仪检测到的相位漂移结果包含了两种相位漂移:光纤延时变化产生的相位漂移,激光频率漂移产生的相位漂移。即
某一特定型号光纤的温度延时系数为可以精确测量的已知量,假设测量光纤L2与测量光纤L1的温度延时系数比值为A,两种光纤在同样环境下有同样的温度变化,则有
由式(12)、(13)可得
由式(14)、(15)、(18)可得
由式(16)、(17)、(19)、(20)可得测量光纤L1和L2内激光频率漂移产生的相位漂移量为
式中,测量光纤长度L1和L2为已知量,A为两种光纤温度延时系数的比值,也为已知量,NL1和NL2为光纤干涉仪检测值,因此可以通过双干涉仪使用不同温度延时系数的测量光纤求出激光频率漂移量。
相位漂移检测电路利用解调出的相位漂移量N1,计算出激光频率漂移量Δf为
使用上述方法测量计算得到Δf,在补偿计算时修正由激光器频率漂移引起的偏差。另外,补偿设备内部通过设计一段固定长度的色散补偿光纤对光梳信号进行色散补偿。
2.3 控制电路和补偿器
测量臂长度变化引起的干涉条纹变化使得PD 探测到的光信号功率发生变化,光功率变化通过模数转换器(Analog to Digital Converter,ADC)后输入微控制器。
测量臂的光纤长度每变化一个波长,干涉条纹就相应的平移一个条纹距离,PD 探测到的光功率就会产生一个周期的强弱变化。两个PD 配合探测,可以判断出干涉条纹的移动方向和移动数量。
系统中,PD1、PD2 探测输入段光纤延迟变化,PD3、PD4 探测输出段光纤延迟变化,PD5、PD6、PD7、PD8 探测1 310 nm 激光器频率漂移。
PD 探测到的光信号功率经过ADC 后进入FPGA 处理器,处理器根据各光功率数据计算测量臂的长度变化,得到光纤长度的变化和同一时间激光器频率漂移量。并根据光纤长度变化和激光器频率漂移量计算需要给PZT 和TEC 的控制量。计算得到的控制量经数模转换器(Digital to Analog Converter,DAC)后输出给PZT 和TEC 进行长度补偿。每个控制周期为0.2 ms,系统每秒完成5 000 次测量和补偿。
补偿器件由缠绕光纤的PZT 和TEC 组成。缠绕光纤的长度为70 m。PZT 用于快速对高频变化进行补偿,TEC 用于扩展PZT 的补偿行程。系统初始化后,TEC 和PZT 均位于其行程的中间位置,开启补偿功能后,由PZT 进行小行程补偿。当测量臂长度变化接近PZT 补偿行程限制时,使用TEC 补偿该长度变化,并在TEC 控制补偿光纤变化的同时逐渐使PZT 返回中心位置,释放PZT 的补偿行程。在单一方向,可以通过这种方式由TEC 补偿多次释放PZT 行程。原理框图见图2。

图2 控制电路功能部分原理框图Fig.2 Functional part of control circuit diagram
实验系统中使用的PZT 的补偿行程约为±200 fs,补偿控制器DAC 的精度为16 位,考虑电子学的噪声,实际可用的精度为12 位,PZT 对光纤延迟的调节步进为0.1 fs。TEC 的补偿行程约为60 ps,工作温度范围为±30 ℃,调节精度为0.1 ℃,对光纤延迟的调节步进100 fs。TEC 调节步进小于PZT 调节行程,为PZT 调节行程的1/4。
在被补偿光纤单位时间内长度变化不大的情况下,TEC 释放PZT 的1/2 补偿行程的时间小于PZT 补偿占用到1/2 补偿行程的时间,可以实现协同补偿。
3 测试系统和测试数据
搭建了测试系统进行测试,对使用该方法的补偿装置进行了功能性验证。补偿装置搭建完成后,先使用补偿装置和少量外围器件进行了基本的补偿功能自测试,然后联合飞秒光梳,对传输光梳信号的情况进行了测试。
3.1 补偿装置自测试
补偿装置带有通信接口,通过该接口,装置内置的控制器可以将测量数据直接输出。本测试通过补偿装置探测、记录并输出在补偿关闭和补偿开启两种条件下,光纤的长度变化情况。
测试系统主要由主动补偿装置、30 m 光纤(由TEC 控温)、波分复用器、法拉第反射镜等组成。系统连接如图3 所示。测试系统中的主动补偿装置对图3 中a'bgh'段光纤的长度变化进行测量,分别测试不进行补偿和进行补偿的情况下的光纤长度变化。g段光纤使用TEC 控温,用于模拟环境温度变化后产生的光纤长度变化。

图3 自测试系统框图Fig.3 Self test system diagram
主动补偿装置开机,启动其中的1 310 nm 激光器和干涉计数电路,在补偿器件不使能和补偿器件使能的两种情况下,通过外部的TEC 控制g段光纤温度,制造光纤长度变化,由主动补偿装置探测并记录a'bgh'段光纤上的测量计数数据。
外部TEC 控制g段光纤温度。每次测试从室温26 ℃开始,开启制冷5 min 后关闭制冷,继续测量5 min,共10 min。在一个测试周期内,g段光纤温度从26 ℃下降到5 ℃再上升到18 ℃,温度变化范围约为21 ℃。
数据采样率为500 次/s,相邻两个数据点间时间间隔2 ms,每次测试记录大约30 万个数据点,每个数据点是该时刻的光纤长度变化干涉计数值,1 计数值对应1.09 fs。使用测试数据绘制曲线,用计数值换算到光纤长度变化值,再换算为时间延迟量,得到被测光纤上时间延迟随时间变化的曲线,结果如图4 所示。补偿关闭的情况下,光纤延迟随温度变化而变化,10 ℃温度变化引起的延迟变化约为20 ps;补偿启用的情况下,光纤延迟不随温度变化改变,整体维持在±1.1 fs 以内,仅在少数点出现了超过2 fs 的变化,变化量仍小于6 fs,峰峰值小于10 fs。存在干涉条纹计数绝对值超过1 的计数点,即延迟变化超过了1.09 fs,其中变化最大的点,测到了-5 的计数,对应的延迟变化达到了5.45 fs,意味着在这些点,延迟变化虽然被探测到,但补偿装置进行补偿后,并没有在这个补偿周期内将长度补偿到计数为0 的范围内。其原因可能为环境中有高于补偿频率上限的噪声等,在后续研究中将尝试通过优化补偿算法和提高控制带宽上限等方法进行改进。

图4 补偿关闭和开启条件下时间延迟变化Fig.4 Time delay variations under compensating off and on
以上测试结果使用了1 310 nm 激光对从FRM1 到FRM2 的整段光纤的往返光程的测量值。实际应用时,误差还包括参考臂光纤长度抖动和补偿装置中未被测量到的d段光纤上的长度抖动等。
3.2 联合光梳测量重频稳定度
上文使用补偿装置内部的条纹计数的测量值进行计算,电路噪声等因素没有被测量到。为了能进一步了解系统的特性,增加了光梳等设备,使用短稳相噪分析仪5125 A,对补偿装置的性能从外部进行进一步的测量。测试使用的光梳功率40 mW,重频200 MHz,载波包络相移fceo、拍频fbeat和重复频率fr的稳定度都优于1×10-16@1s,2×10-20@104s。
搭建如图5 所示的测试系统。将飞秒光梳锁定在氢钟信号上,分以下三种情况进行了测试。情况1 直接测量:如图5(a)连接设备,将光梳输出的光信号通过1×2 光纤耦合器分为两路,将两路光信号分别直接接入PD,探测到的电信号经过带通滤波器后输入5125 A 的输入端口和参考端口,测量频率稳定度;

图5 测试系统框图Fig.5 Test system diagram
情况2 开启补偿:如图5(b)连接设备,将分光后的1 路光信号直接接入PD,另一路接入传递系统和一段30 m 长光纤后再接入PD,补偿装置开启补偿功能,探测到的电信号经过带通滤波器后输入5125 A 的输入端口和参考端口,测量频率稳定度;情况3 关闭补偿:设备连接方式与情况2 相同,测量时,补偿装置关闭补偿功能,不对光纤长度变化进行补偿。
对测试的数据进行计算,三种情况下的阿伦方差如图6 所示。图中绿色线条是直接将光信号分为两路进行探测的频率稳定度,紫色线条是将信号经过补偿传输30 m 的频率稳定度,两组测试结果相近,和测试设备5125 A 的底噪在同一量级;图中蓝色线条是信号不经补偿传输30 m 时的频率稳定度,与另外两组测试结果相比,在各采样周期下均变大了约一个量级。实验结果说明补偿装置有效抑制了传输线上的噪声。
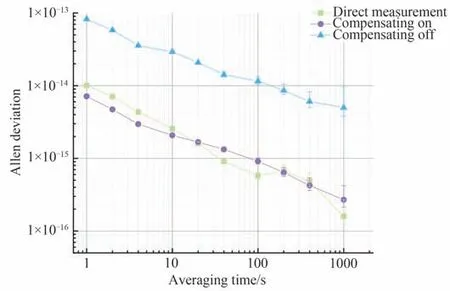
图6 频率不稳定度Fig.6 Frequency instability
4 结论
本文介绍了一种具有高时间延迟稳定性的光纤频率信号短距离传递噪声抑制方法。在3×3 光纤耦合器干涉仪基础上,选用1 310 nm 激光作为干涉光源,使用条纹记数法测量传输光纤长度变化,补偿传输光纤随环境温度变化和振动等因素引起的延迟变化,提高了传输光纤的时间延迟稳定性。在5~26 ℃的环境温度变化条件下,传输时间延迟变化量小于10 fs。该方法采用嵌入式系统,补偿算法可以通过更新程序进行优化,系统误差主要来自等长代替段光纤差异,探测电路和补偿电路的环境温度变化不影响补偿结果。另外,可以通过行程更大的温控延迟光纤,实现更大环境温度变化范围的延迟补偿,满足空间环境下光纤频率信号短距离传输的需求。
本方法与其他近年进行的光纤频率传递方法相比,其传递距离仅在数十米量级,远小于其他方法数十千米乃至上千千米的传输距离。传输距离短是受限制于该方法使用的光纤干涉测量原理:当传输距离超过辅助测量激光(本文使用1 310 nm)的相干长度后,探测不到干涉条纹,无法实现对光纤长度变化的测量,也就无法进行控制补偿。
本方法的优点是精度高和可以承受较大的环境温度变化:传输距离在可用范围内时,干涉测量可以提供较高的测量精度,相比其他方法补偿后数十fs 量级[6-8]的传递时延抖动峰峰值,经过本方法补偿后光纤上时延抖动小于10 fs;本方法的补偿系统还可以适应环境温度大范围变化的条件,可以用于短距离大温度变化环境的频率传输应用,例如地面站钟房到天线的传输,空间站钟组到舱外比对链路的传输等。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
科学家(2021年24期)2021-04-25
家庭影院技术(2020年1期)2020-06-24
电子制作(2019年16期)2019-09-27
家庭影院技术(2019年4期)2019-04-17
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
网络安全和信息化(2017年6期)2017-11-23
网络安全和信息化(2016年7期)2016-11-26
中国惯性技术学报(2015年1期)2015-12-19
