
极地船舶冰区航行性能的试验预报技术发展现状
2023-03-05 07:13孙剑桥田育丰
船舶 2023年1期
黄 焱 孙剑桥 田育丰
(1.天津大学 水利工程仿真与安全国家重点实验室 天津 300350;2.天津大学 建筑工程学院 天津 300350;3.天津大学 港口与海洋工程天津市重点实验室 天津 300350)
0 引言
对于航行船舶来讲,快速性与操纵性是描述其基本性能的两大方面。快速性是指船舶在主机额定功率下以一定速度航行的能力,通常包括船舶阻力和船舶推进两大部分:前者研究船舶航行时所遭受的阻力,后者研究克服阻力的推进器及其与船体和主机之间的相互协调一致。操纵性一般包括船舶在航行中按照驾驶者的意图保持既定航向的能力(即航向稳定性)和改变航行方向的能力(即回转性)。对于冰区航行的极地船舶来讲,上述两类性能将受到航行过程中遭遇的海冰环境条件及其载荷过程的显著影响。同时,即便面对同样的海冰条件,船型的差异也会导致海冰破坏与运动过程发生改变,进而造成载荷过程的变化[1]。由此可见,极地船舶具有十分复杂的冰区航行特性,而对这些特性形成系统性认识和合理描述,则是形成航行安全性保障技术的关键和基础。
对于极地船舶而言,设计建造中必须依据先验性的航行安全性能认识,而目前国际上可以借鉴的实船航行经验与公开数据极度匮乏,这就必须借助有效可靠的预报方法。然而,当前海冰力学与工程学的发展仍处于机理性探索阶段,因此,在理论解析与数值模拟上难以形成对冰区航行船舶安全性进行可靠预报的方法。据此,国际学术界和工程界已形成共识,冰水池模型试验是当前预报与评估船舶冰区航行性能的唯一可靠途径,并已在极地船舶相关规范和指南中予以明确[2-3]。
从历史研究来看,冰水池模型试验自20 世纪50 年代起便服务于极地破冰船的设计[4],并随着极区海域资源开发和商业航行的兴起而不断发展与更新。冰水池试验是利用低温拖曳冰水池,在室内模拟极地海冰环境,通过探究模型冰与船体(或其他类型的海洋工程结构)之间的相互作用过程,为极地船舶的设计和运行提供必要的参考。目前,在极地船舶冰区航行性能冰水池试验预报技术的发展方面,国际拖曳水池会议(ITTC)冰委员会(the specialist committee on ice)扮演着重要的角色。ITTC 冰委员会由世界各主要冰水池组成,通过试验技术交流开展对比验证试验,定期发布ITTC 冰水池试验推荐规程,促使不同冰水池开展的各类试验能够取得一致性结果[5]。本文以国内外相关研究与试验技术的发展动态回顾为基础,结合ITTC 相关试验规程,从阻力、快速性与操纵性3 个方面,对极地船舶冰区航行性能的试验预报技术发展现状进行介绍,并对其中的关键技术进行梳理。
1 冰阻力试验
开展冰区船舶航行阻力试验的目的是测量已知船、冰条件下船体受到的冰阻力,并评价船体线型在破冰和清冰过程中的有效性。一般来讲,冰阻力试验可根据所模拟的冰环境特征分为4 类:
(1)平整冰条件下的连续破冰航行阻力试验;
(2)浮冰区中的非连续破冰航行阻力试验;
(3)碎冰航道中的航行阻力试验;
(4)碎冰层叠区/冰脊中的航行阻力试验。
因此,业界在针对船舶冰区航行阻力的试验模拟与预报技术的早期研究中,一方面关注针对复杂海冰环境条件的有效模拟,以提高试验场景的相似性与结果的预报精度;另一方面则关注冰阻力的构成及产生机理,并研发相应的测试技术。
1.1 复杂海冰环境的室内模拟
极地船舶在航行过程中所遭遇的冰条件呈现出多种突出性特征,除了常规的平整冰(level ice)、浮冰场(pack ice)以外,还包括变形冰(deformed ice)。变形冰是高纬度极地海域特有的海冰存在形态,是天然海冰在海洋水动力环境以及人类经济活动作用下发生相互作用或变形破坏,并进一步演变出的海冰存在形态,包括反复冻结的碎冰航道(brash ice channel,下页图1)、碎冰场(rubble field,下页图2)与冰脊(ice ridge,下页图3)等。碎冰航道是不同船舶多次驶过同一航道时,航道中的碎冰经过“冻结-碾压-破碎-再冻结”的反复过程而形成。碎冰场通常是指由专业破冰船或冰区管理船在人工干涉的情况下,将平整冰破碎后形成较大范围的碎冰区。碎冰场的制造一般是为了减小极地海域海洋平台的冰载荷。冰脊是漂浮的海冰在风、流的推动下,边缘互相挤压、重叠、堆积而形成。冰脊一般由3 部分组成,即水上的碎冰堆积层(sail layer)、中间的冻结层(consolidated layer)及水下的碎冰堆积层(keel layer)。根据已公开发表的文献资料[6],冰脊水下碎冰堆积的深度可达到其水上堆积高度的5 倍以上,水下堆积的宽度一般为水上堆积宽度2~ 3 倍。

图1 碎冰航道

图2 碎冰场

图3 冰脊示意图及水下照片
与模型冰制备工艺存在多样性[5,7]的情况类似,国内外各大冰水池针对以变形冰为代表的复杂海冰环境条件的室内模拟方法也不尽相同。ITTC 在针对变形冰模拟的推荐规程方面,也经历了多次的论证、增删与修改,直至近年才提出了较为全面且操作性强的指导方案[8]。国内天津大学冰水池在过去十年中,基于成熟的室内低温模型冰制备技术与国际首创的覆雪平整冰模拟技术[9],研发了变形冰的冰水池模拟技术,并在极地多用途船与双向破冰极地油船的穿越冰脊试验[10]中予以应用,如图4所示。

图4 天津大学冰水池开展的冰脊试验相关场景
1.2 冰阻力的分项解析与测试
针对船舶冰区航行阻力,冰水池试验研究工作大多致力于将阻力成分进行分解,并将各阻力成分与船体参数、冰条件之间的联系,通过半理论半经验的公式予以表达,进而指导极地船舶的优化设计。在加拿大学者JONES 发表的文献综述中[11],KASHTELJAN 等[12]被认为是首次对破冰船在平整冰区航行中的阻力构成进行分析,通过对Ermak号破冰船的模型和实船试验数据进行分析,提出了一个计算总阻力的公式,公式中包含4 个阻力分量:冰破碎力、与重量相关的力(包括碎冰下潜与翻转造成的力、船体位置改变引起的力、干摩擦阻力等)、船体穿越碎冰所受到的力和水流阻力。EDWARDS等[13]开展了一系列针对五大湖破冰船Mackinaw 号的现场及模型试验工作,为后续学者的研究提供了大量的数据。VANCE[14]通过对5 组模型试验与现场观测数据进行统计和分析,得到了1 个“最优回归方程”,用来计算船舶在冰区航行的阻力。此方程中的总冰力由3 部分构成,即冰破碎力、冰下潜力和1 个与速度相关的阻力项。ENKVIST[15]针对3 艘冰区船Moskva 号、Finncarrier 号和Jelppari 号进行了模型试验,并将试验结果与现场观测结果进行了比较;基于对试验结果的分析,并结合量纲分析与一定的理论假设,提出了1 个半经验方法——Enkvist 法,对船体在平整冰区航行中的冰力组成进行评估。后续,ENKVIST[16]为对冰破坏阻力所占比例形成评估,提出了基于“预切割冰”(presawn ice)试验的碎冰下潜阻力测试方法,并在冰水池实验室和现场试验中予以应用,如图5[16]所示。ETTEMA 等[17]通过一系列模型试验,对自由运动和固定约束下船模的冰阻力差异进行分析,并得出了在较明显升沉和纵摇运动条件下的船模冰阻力均值和极值,均大于固定拖曳模式下冰阻力均值和极值的结论。此外,他们的研究还表明,在较小冰厚和较大航速下,自由运动和固定约束下船模的冰阻力差异逐渐缩小并趋于一致。上述研究工作也为ITTC 冰阻力试验推荐规程的制定和更新奠定了基础。目前的ITTC 规程针对冰阻力试验推荐了2 种船模拖曳方式:一种方式是将船模放置于拖车下方,通过1 个多轴测力传感器连接;另一种方式是船模位于拖车后方,通过拖曳杆连接,测力传感器布置在拖曳杆一端。这2 种拖曳方式均要求保证船模可自由横摇、纵摇和垂荡,并限制纵荡、横荡和艏摇,这与ETTEMA 等[17]的研究结论保持一致。若要通过阻力试验评估特定船型的破冰性能和排冰性能,除了掌握船舶在特定冰况和航速下受到的总阻力之外,还需对总阻力中的关键成分进行分解。针对此问题,ITTC 以平整冰为例,给出了如式(1)所示的表达形式:

图5 Enkvist 开展的船模预切割冰阻力试验场景
式中:RIT为冰中总阻力,N;Rbr是冰破坏所产生阻力,N;Rc是动态清冰阻力(包含冰块的翻转、加速等),N;Rb是静态清冰阻力(冰块的浮力),N;RIW是冰条件下的水阻力,N。
针对上述阻力分项的测试,ITTC 结合敞水阻力试验,引入了ENKVIST[16]提出的“预切割冰”试验方法予以实现。其中,敞水阻力试验即在冰水池中清理出一片无冰水面,按照阻力试验方法测试敞水阻力RIW。预切割冰阻力试验即在平整冰面预先按照船首破冰的形状进行切割,如图5 所示,从而近似地认为在冰阻力中排除破冰阻力Rbr成分。将预切割冰试验结果减去敞水阻力试验结果,即可得到清冰阻力成分Rc+Rb;在极小航速下(例如VM=0.02 m/s)开展预切割冰试验,即近似地认为冰块的翻转、加速等动态进程可以忽略,则可以得到静态清冰阻力成分Rb,由此即可获得各项阻力成分的大小。
上述ITTC 冰阻力试验操作规程,仅适用于常规的平整冰阻力的解析。随着极地船舶向大型化、高冰级方向的不断发展,船舶在冰区所面临的破冰场景也越来越多样化,如冲撞式破冰、双向破冰与穿越冰脊等。早期建立的一些冰阻力经验公式在新型船舶应用上的误差越来越大,诸多破冰场景也逐渐超出了其适用范围。在此背景下,针对这些多样化破冰场景及冰阻力经验评估方法修正后的冰水池试验研究得以进一步细化和深入。ETTEMA 等[18]针对船舶在碎冰场中的航行阻力进行了模型试验,并重点考察了碎冰尺寸对阻力的影响。GLEN 等[19]通过一系列的模型试验比较了船体在4 种不同艏部构型下的冰阻力,并初步给出了各艏部构型的适用条件。LEIVISKÄ[20]针对船舶穿越冰脊的航行阻力进行模型试验,将船体穿越冰脊的过程分为了9 个阶段,并构建了冰脊阻力与船体参数和冰脊参数的关系。JUURMAA 等[21]针对新型阿芙拉级极地双向航行运输船,分别进行了不同冰条件下艏向和艉向航行的冰阻力模型试验,并指出在较为严重冰条件下艉向航行的优越性。LEIVISKÄ 等[22]对船舶在碎冰航道中的航行阻力进行了试验分析,并对阻力随航速及航道-船宽比的变化关系进行考察。HERREROS等[23]针对球鼻艏船在不同冰条件下的航行阻力进行了模型试验,并对不同冰条件下的航行阻力大小进行比较。MÅRD[24]针对冰区三体船进行航行阻力试验,重点对三体船航行过程中的冰排的破坏模式进行观测,并考察了阻力随主-侧船体间距的变化关系。MYLAND 和EHLERS[25-26]通过一系列模型试验考察了不同破冰船首线型对破冰阻力的影响,通过对破冰尺寸的观测和数据统计(如图6 所示),提出了Lindqvist 冰阻力经验公式[27]的修正方法。

图6 MYLAND 和EHLERS 给出的船底碎冰尺寸及分布形态
国内对冰阻力的试验研究起步较晚,但在近年来的技术攻关下,取得了一些有益的结论。为弥补“预切割冰”法中总阻力与冰破坏阻力“非同步测量”的缺陷,黄思洋[28]采用柔性触觉式表面压力传感器(如图7 所示),实现了对船体冰破坏阻力成分的直接测量及其与总阻力的同步提取,在此基础上分析了受船体线型变化影响的冰阻力分布特征(如下页图8 所示),并对3 种不同船型的破冰能力与排冰能力形成了量化评价。该项试验技术后续在某型极地破冰船的艏部线型优化中予以应用。HUANG 等[29]在国际范围内首次实现了冰水池实验室覆雪冰条件的模拟,并将此用于覆雪条件对极地船舶冰阻力影响的试验评估上,如下页图9 所示,同时讨论了Lindqvist 公式在覆雪冰条件下的修正策略。
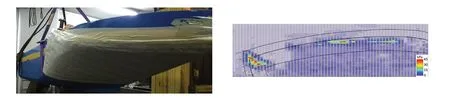
图7 触觉传感器在船模冰阻力试验中的应用
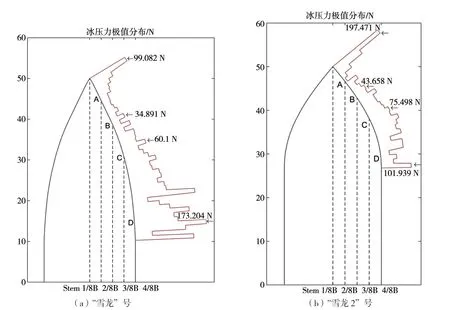
图8 试验测得的船首冰压力分布

图9 HUANG 等给出的覆雪与无雪条件下平整冰的破坏差异
2 冰区快速性试验
开展冰区快速性试验的主要目的是:预报特定冰条件下可达到的航速和所需的推进功率;获取推进系数,确定船舶推进系统效率;明确冰与推进系统(如螺旋桨)之间的相互作用关系等。从国内外各大冰水池的操作实践来看,推进试验的方式可分为冰水池拖曳自航试验、敞水过载试验和冰水池全自航试验。
2.1 冰水池拖曳自航试验
俄罗斯克雷洛夫国家科学中心冰水池、德国汉堡水池、国内天津大学冰水池等常采用冰水池拖曳自航试验的方法进行推进试验。该项试验常以拖车拖曳船模穿越冰盖的方式进行,试验中力的平衡关系如图10 和式(2)所示。

图10 冰水池拖曳自航试验船模受力状态
式中:Teff为螺旋桨发出的有效推力,FX为拖曳力,RI+RIW为冰中航行总阻力,N。
当拖曳力FX=0 时,船模有效推力和阻力达到平衡,由此确定船模的自航点。在拖曳自航试验中,螺旋桨转速的选取十分重要,然而实际操作中,由于冰阻力的波动较大,往往很难找到适当的螺旋桨转速使得船模所受到的推力恰好能够克服船体阻力。因此,自航点的确定通常需要设定多种转速,即低于自航点的低转速和高于自航点的高转速(参考系柱试验结果),然后通过拟合插值得到。在得到自航点后,可根据船模自航试验曲线,得到对应的转速和扭矩。通过模型比尺还原至原型后,进而得到特定冰厚和航速下,船体克服冰区航行阻力所需要的收到功率。
通过进行多航速条件下的试验,可得到特定冰厚下螺旋桨收到功率随航速的变化关系,即P-V曲线。通过P-V曲线还可以得到在既定功率和冰厚下,船舶可以达到的稳定航速。在此基础上,通过对多种冰厚进行试验,还可以得到船舶稳定航行速度与连续破冰厚度之间的关系,即h-V曲线,进而对船舶的连续破冰能力形成评价。
2.2 敞水过载试验
敞水过载试验,是在冰水池内开展船舶冰阻力试验后,相应的推进试验转至常规拖曳水池或无冰条件下进行。所谓“过载”,是将螺旋桨提升至较高转速,使得螺旋桨发出的推力远大于船模敞水阻力。此时,拖曳系统对船模的拖曳力即成为限制船模保持特定航速的强制力。当强制力等于同等航速下先期阻力试验中获得的净冰阻力时,船模达到自航点。敞水过载试验的主要缺陷是无法考虑漂移碎冰对船后伴流场及螺旋桨水动力性能的影响。为对此进行修正,需额外进行1~ 2 次同等冰厚条件的冰水池拖曳自航试验,用于考察船后桨冰相互作用情况。敞水过载的试验方式在加拿大国家研究委员会(NRC-IOT)冰水池中较多使用。通过此种方法,JONES 和LAU[30]对Healy 号破冰船的破冰能力进行预报,并与实船测试结果取得良好的一致性。
2.3 冰水池全自航试验
在全自航试验中,船模不受拖曳力作用,处于完全自由航行的状态。此时,船模航速主要受螺旋桨推力控制。由于螺旋桨输出推力并非恒定,因此需要在试验中保证足够长的试验段,以试验段测得的航速均值作为船模速度。全自航试验与船舶真实破冰航行场景相似,为保证试验结果的准确性,航行中各载荷值均需具有良好的相似性。这是因为确定自航点的依据是螺旋桨推力与总阻力的平衡,模型冰力学特性的偏离将直接导致自航点的变化,从而导致螺旋桨与冰相互作用过程的改变,进一步放大试验偏差。因此,对模型冰力学参数和摩擦系数的相似性要求高于拖曳自航试验。得益于大量的实船设计与测试经验,芬兰Aker Arctic 冰水池常采用该种方式对船舶的冰区快速性进行预报。
2.4 冰桨相互作用评估
对于冰条件下螺旋桨的载荷与水动力性能分析,同样是冰水池推进试验的重要研究内容。为评价船舶在冰区航行中的冰桨作用情况,第17 届ITTC 大会中提出了“冰效率系数ηI”。在同等转速和进速下,定义螺旋桨的推力差为dTeff=TI−TOW,桨轴上的扭矩差为dQ=QI−QOW。式中的下标I、OW分别表示冰和敞水情况。冰效率系数ηI通过下式(3)计算:
船舶在冰区航行过程中的冰桨相互作用受到多种因素的影响,如船型、冰条件和破冰场景等,学术界针对这些因素的影响规律已开展了大量试验研究工作。TAMURA 等[31]通过斜板下压冰块的方式,模拟了碎冰块与导管桨的水下碰撞过程,并重点考察了冰强度与冰块尺寸对螺旋桨水动力性能的影响。LEIVISKÄ[32]针对一配备全回转吊舱式推进器的极地运输船,开展了敞水与平整冰中的船模拖曳自航试验,并重点考察了冰中艏向与艉向航行的推力减额分数差异。WANG 等[33]针对吊舱式推进器进行了一系列冰水池切削试验,指出了桨叶切削冰过程中的遮蔽效应。黄焱等[34]针对典型冰困情形下螺旋桨的铣冰过程,在冰水池内进行了一系列模型试验,如图11 所示,并初步探讨不同切削深度下螺旋桨推力、扭矩及冰载荷的变化规律。针对吊舱式推进器在穿越冰脊过程中的冰载荷评估问题,黄焱等[35]在冰水池内开展了不同转速、舵向角及浸没深度下的单吊舱穿越冰脊试验,如图12 所示,并将试验的载荷预报值与规范计算值进行了对比。这些工作对相关试验规程或船舶设计规范的更新起到了推动作用。

图11 冰桨切削过程的试验场景

图12 单吊舱穿越冰脊的试验场景
3 冰区操纵性试验
冰水池船舶操纵性试验的主要目的是研究船舶在冰区的转向性能,并评价船舶转向装置(如舵、侧向推进器和全回转吊舱式推进器等的有效性)。同时,在操纵性试验中,也研究船舶转向航行时船体周围浮冰的运动情况。冰水池船舶操纵性试验一般包括回转试验、破离航道试验和星形转向试验等。
3.1 回转试验
回转试验是为了确定船舶在冰区航行时进行回转操作所需的最小半径。由于室内冰水池操作空间的限制,目前世界上仅有芬兰、加拿大和韩国的方形冰水池可完成船模在冰中的全回转试验,如图13 所示。当回转轨迹较短时,估算的回转直径和半径结果可能存在误差。ITTC 在冰区操纵性试验的推荐规程中指出,当回转角度超过135°时,回转直径的估计误差相对较小[36]。通过回转模型试验测试得到的回转直径和轨迹,可以按照几何比尺还原至原型,回转时间的相似比尺由弗劳德数控制。

图13 芬兰Aalto 冰水池开展的全回转试验场景
另外,由于船模回转过程中,船肩、船尾会与冰层接触并令其发生破坏,保证模型冰抗压强度的相似性是提高试验结果准确性的重要条件。针对回转过程中船肩、船舯与船尾受到挤压冰载荷作用进程,吴炜和黄焱[37]开展了冰水池模型试验,通过触觉式表面压力传感器,考察了冰载荷空间分布的“点接触”和“线接触”特征随不同转向角度的变化规律。
北纬科技002148:公司是首批获得工信部批复开展移动通信转售业务试点的企业,属于电信虚拟运营商,拥有流量业务经营优势。近年来,移动互联网发展迅速,移动互联网服务成为主流,公司在移动互联网服务方面,与应用商店、手机网站及门户网站等多家渠道商形成了广泛良好的合作关系,为公司的长期稳定发展奠定了基础。公司旗下北纬国际中心园区是行业的孵化器、加速器和合作交流的平台,有望受益科创板建设。
3.2 破离航道试验
在很多情况下,船舶在冰区航行时会沿着破冰船或其他船只开辟的航道前进。当船舶需要转向时,就必须破坏航道两侧平整冰层,从而驶离航道,如图14[36]所示。为模拟船舶在航道中不同的航行状态,ITTC 在冰区操纵性试验的推荐规程中指出,船舶在破离航道试验中的初始状态可以从静止开始,或以特定速度航行;舵角可以在初始状态下设置好,也可以在航行中打舵。

图14 破离航道试验示意图
另一方面,航道冰条件也会对试验结果造成明显影响,包括航道宽度、航道边缘形状及航道内浮冰形态等。由于航道宽度有限,船舶转向破冰的加速距离很短,如果船首结构型式不利于破冰作业,会出现被一侧航道弹回的现象。当船舶被航道反弹时,船体稳性和运动状态会受到很大影响,不利于后续的破冰进程,因此,首次碰撞对破离航道十分重要。针对这一场景,国内黄焱等[38]在冰水池内开展了某极地油船的破离航道试验,如图15 所示,通过航道拓宽次数、总行程和破离时转向角等指标,对不同冰厚与航道宽度下的破离能力进行了量化评估。

图15 船舶破离航道的试验场景与轨迹记录
3.3 星形转向试验
当船舶需要在航道的有限空间内完成180°转向时,通常采用星形转向操作,即船长通过反复的“正车-倒车”操作完成狭窄空间内的转向活动,如图16 所示。破离航道可视为星形转向操纵的第一步。目前,针对星形转向场景,可供参考的试验研究工作较为匮乏,国外已开展的研究主要包括现场操作经验的总结[39]及初步的理论解析[40]。
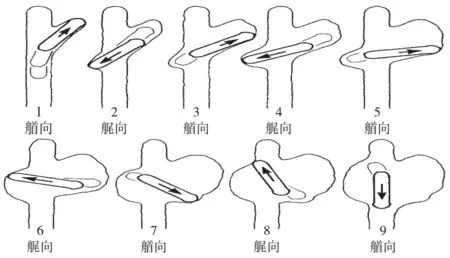
图16 星形转向试验示意图[36]
4 结语:试验技术的未来发展方向
4.1 针对冰阻力试验
如前所述,早期建立的一些冰阻力经验公式在新型船舶与复杂破冰场景的应用上,面临着预报精度较差、适用范围过窄的瓶颈。在缺乏实船冰区航行数据的情况下,冰水池模型试验成为了研究该项问题的唯一可靠途径。因此,未来仍需在多种船型、航速与冰条件的冰水池试验数据基础上,采用适当的无量纲化分析方法,形成冰阻力经验公式的修正或推陈出新。同时,需进一步探究现有“弗劳德-柯西”相似体系对复杂破冰场景(如穿越碎冰场、冰脊等)的适用性,通过对模型冰关键力学性质的控制、冰破坏与运动过程的精细化观测,实现冰阻力试验预报精度的提升。
4.2 针对冰区快速性试验
极地船舶的高冰级化发展意味着船舶将遭遇更厚、强度更大的冰条件,这将进一步加剧螺旋桨与冰的相互作用。这一情形对于艉向航行船舶而言更是如此。这便要求在快速性试验中对冰桨相互作用进程形成精细观测,并对螺旋桨在冰中的水动力性能形成可靠预报。然而,从敞水试验的操作实践来看,螺旋桨的水动力性能评估遵循着以“进速系数”为核心的试验相似体系。如何将这一相似体系与冰水池试验的“弗劳德-柯西”相似体系进行匹配、融合,是冰水池快速性试验面临的主要问题,这一问题仍需在未来研究中予以重点关注。
4.3 针对冰区操纵性试验
如前所述,针对星形转向操纵场景,已公开发表的试验研究工作较为匮乏。在全球气候变暖、极地航行日趋频繁的当今,非冰区船舶在未来可能面临极区航行任务。因此,合理的操船策略成为船长或操船人员在面临多种冰区作业场景时的必需。该策略的制定除了参考已有航行经验以外,仍需通过冰水池模型试验,在获得船舶冰区操纵性能评估的基础上,结合多工况、多组次的模型试验,形成操船策略的验证、修订或最优方案评判。
猜你喜欢
珠江水运(2023年3期)2023-03-04
微型电脑应用(2022年12期)2023-01-30
舰船科学技术(2022年20期)2022-11-28
吉林电力(2022年1期)2022-11-10
能源工程(2022年2期)2022-05-23
船舶力学(2022年1期)2022-02-10
造船技术(2021年6期)2022-01-05
党员生活·中(2021年8期)2021-08-30
中国水运(2017年5期)2017-05-22
舰船科学技术(2016年1期)2016-02-27
