
基于MEMS惯性传感器和气压计的行人室内导航系统设计*
2023-03-03 08:45邹一凡王玮冰
传感器与微系统 2023年2期
邹一凡,李 佳,王玮冰
(1.中国科学院微电子研究所,北京 100029; 2.中国科学院大学,北京 100049)
0 引 言
行人导航系统(pedestrian navigation system,PNS)被广泛应用于紧急救援、人员管理、健康护理等场景[1~3],用于在全球定位系统(GPS)不可用的室内环境中获得行人的准确定位信息。根据实现原理的不同,PNS可分为基于无线信号、基于视觉设备、基于惯性传感器3种类别[4]。其中,基于惯性传感器的PNS主要基于行人航迹推算(pedestrian dead reckoning,PDR)理论,具有不依赖于外部设备、低成本、高可靠性的特点,因此成为了该领域研究的热点。
PDR系统通过将惯性测量单元(inertial measurement unit,IMU)安装至可穿戴设备中,测量行人在运动时的加速度、角速度、空间磁场、气压值等信息,经过一定的数据融合算法,还原出行人运动的空间轨迹。PDR算法可分为基于步长—方向模型的算法以及基于惯性导航系统(inertial navigation system,INS)的算法。其中,前者通过对传感器数据进行分析、建模,对行人每一步的步长与方向进行估计,从而以步为单位更新行人位置;后者通过对传感器的空间姿态进行实时计算,将加速度转换至导航坐标系中进行2次积分,分别获得空间速度与位置。本文即基于后者进行PNS的设计。
当前,基于INS原理的PDR系统有一个通用的、经受过实践检验的算法框架,即INS+扩展卡尔曼滤波(extended Kalman filtering,EKF)+零速更新(zero velocity update,ZUPT)框架,简称IEZ框架。这一框架最初由Foxlin E[5]提出,经由Jiménez A R[6]改善,如今已在事实上成为该领域的基本算法思路[7~9]。为了修正系统在航向角上的误差,在其基础上进一步添加零角速度更新(zero angular rate update,ZARU)、罗盘(compass)、启发式偏移清除(heuristic drift elimination,HDE)、气压计修正等算法,即可获得更加精确的定位结果。
本文基于IEZ+ZARU+HDE+气压计修正的算法思路,自主研发了软硬件系统,设计并实现了完整的行人室内导航系统方案。通过实验对系统性能进行了验证,结果表明本文系统可满足实际应用需求。
1 基于IEZ框架的导航算法设计
1.1 系统总体框架
本文中,使用加速度计+陀螺仪+气压计的传感器组合进行数据采集。系统硬件中包含三轴磁力计,但并没有使用,其原因在于室内环境中,地磁场受到严重的干扰,无法用于对航向角进行修正[10]。整体的算法框图如图1所示。由传感器获得的数据被直接用于INS解算,获得对载体姿态、空间运动速度以及位置的初步估计;使用EKF对INS系统的误差进行估计,其测量值来自多个来源,将在1.2节中进行详细介绍;当脚步落地的零速区间被检测到时,即执行ZUPT与HDE过程。

图1 系统算法框图
1.2 INS算法
图1中最上层为INS部分,利用惯性导航原理对载体姿态、速度与位置进行更新。使用四元数q=[q0q1q2q3]T作为姿态表示方法,使用一阶近似对四元数微分方程求数值解,可得离散化的四元数更新方程
(1)
式中ω=[ωxωyωz]为陀螺仪采集到的三轴角速度数据,T为采样周期。利用上式计算后再将其归一化,即完成了通过陀螺仪数据更新姿态。

(2)

(3)
之后,即可对加速度na进行2次积分,分别得到空间速度nv与位置np。
1.3 EKF算法
EKF算法用于对系统中各个变量的误差进行估计。首先定义15维的状态向量
xk=[δφδωδpδvδa]T
(4)
其中,包含了姿态估计误差δφ,n系中的速度误差δv和位置误差δp,以及b系中的陀螺仪偏移δω和加速度偏移δa,均为三维向量。为了方便利用测量进行更新,此处姿态误差使用欧拉角进行表示,在对姿态进行误差修正时,将-δφ/T代入式(1)即可。
写出系统状态更新方程
(5)
(6)
式中k为第k次采样,wk为系统噪声,I与0均为3×3矩阵,[nak×]为向量nak对应的叉乘矩阵
(7)
之后,系统状态即可随着传感器采样进行迭代更新,直至获得测量值。本文系统中的测量值有:1)由ZARU获得的δω测量值。2)由ZUPT获得的δv测量值。3)由HDE获得的δφ(3)测量值。4)由气压计数据获得的δp(3)测量值。按这一顺序,写出包含所有量的测量矩阵H
(8)
可知,上述测量值并非在同一时间获得:ZARU需要在完全静止状态下测量,ZUPT与HDE需要在步行中的零速区间测量,气压计数据的更新取决于其采样频率。因此,当进行某一测量时,只需使用矩阵H中对应行的元素,例如在零速区间进行测量时,只需保留H的2,3行即可。
之后,即可利用卡尔曼滤波的基础原理,对系统状态进行估计,这里不再进行赘述。将估计所得的误差值从INS所得量中减去,即可得到系统的最终估计值。
1.4 ZUPT与零速区间检测算法
ZUPT利用行人脚步落地后速度为零的特点,将相邻两步内经由INS计算累积得的空间速度向量作为对系统误差的测量,从而用于对系统状态进行估计。易知,对脚步落地区间的测量准确度直接影响着ZUPT的应用效果,需要对零速区间检测算法进行设计。相对于简单的单传感器阈值法,使用基于广义似然比检验(GLRT)的零速检测算法具有更高的准确度,即定义函数
(9)

1.5 HDE算法
在IEZ框架下,由于重力向量本身无法提供在水平面航向上的参考信息,因此,系统在航向角上的误差会逐渐累积,使得定位结果逐渐偏离正常轨迹。同时,由于室内环境下磁干扰严重,无法有效利用地磁向量作为航向的参考。此时,HDE算法即成为解决上述问题的较好方案。
HDE算法的核心思想来自于一个先验假设,即在楼房等室内环境中,多数走廊之间呈现出互相垂直或夹角45°的规律。将这些方向设置为主方向,则行人在多数时间是沿着主方向行走的。运用这一假设,即可利用行人运动时解算所得的航向,与其邻近的主方向进行对应,从而消除航向角的累积偏差。
同时,由于文献[11]中原始的HDE算法不对运动类型进行区分,在行人作非直线运动时反而会造成更大的误差,因此,本文以文献[11]所提出的iHDE算法为基础进行改进,设计了下述算法。
首先,定义行人第k步的步长lk与方向θk如下
(10)
(11)
式中px,k与py,k分别为由INS获得的第k步的x,y位置。之后,定位2个控制变量,分别用于判断行人的步长与行进方向
(12)
(13)
可见,当单步步长大于阈值,且过去5步内的航向变化小于阈值时,两控制量值为1,这代表着行人正在以正常的步态进行直线行走。只有在这种条件下,才利用θk与主方向之间的差值作为HDE测量,从而在其他不规则运动状态时禁用HDE,避免了可能带来的定位精度下降。
2 实验验证
2.1 行人室内导航系统方案设计
本文面向实际应用需求,设计了完整的行人室内导航系统方案,包括数据采集模块的软硬件系统、上位机软件以及上文所述的系统算法。系统整体架构如图2所示。将数据采集模块安装至行人足部后,对九轴传感器(MARG)以及气压传感器数据进行采集、处理后,通过算法对行人当前空间位置进行估计,并将运算结果通过蓝牙传输至上位机。

图2 行人室内导航系统架构
数据采集模块以STM32 L031G6U6作为MCU,搭载九轴传感器ICM—20948与气压传感器BMP280,使用nRF52832通过BLE5.0与上位机进行数据通信。模块整体尺寸为35 mm×35 mm×10 mm,由锂电池进行供电,实物如图3所示。
图3 数据采集模块实物
2.2 实验设计与结果分析
为了验证上述系统及算法的有效性,通过设定运动路径,进行了多组实验。试验对象足部安装采集模块,以125 Hz采集惯性数据,以25 Hz采集气压数据,利用上述算法进行了轨迹的还原。
1)走廊直线路径实验
试验对象在静止一段时间后,沿着一段长40 m,宽1.8 m的走廊边缘,由一端行走至另一端,再沿另一边缘折返回来至出发线。使用本文设计的算法流程进行运动轨迹还原,所得结果如图4所示。
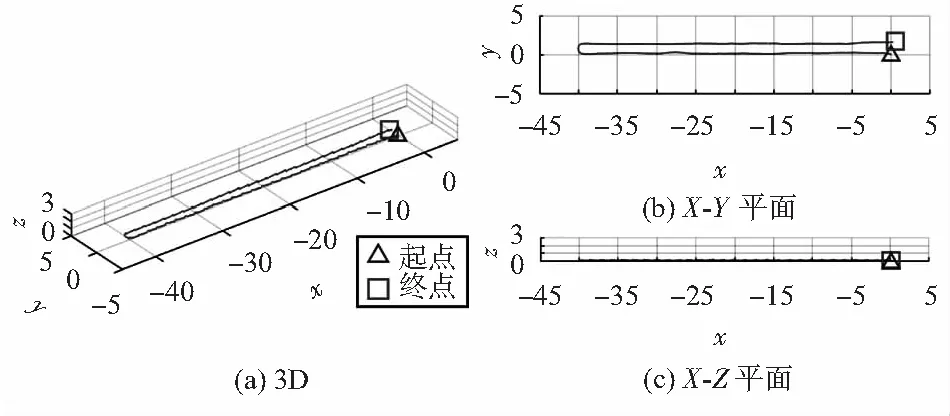
图4 走廊直线路径实验轨迹
可见,本文所设计算法能够较好地还原出行人运动的轨迹。图4中终点坐标与实际位置相差0.79 m,占总路程的0.96 %。
2)组合路径实验
在实际应用场景中,行人在室内的运动路径是多样的,既包括沿直线走廊的行走,也包括沿曲线行走、上下楼梯、乘坐电梯等。为了验证系统在多种运动路径下的定位功能,设计了组合路径进行实验。最终解算所得运动轨迹如图5所示。实验对象由出发点出发,先搭乘电梯,由6楼下降至1楼,随后沿走廊行进。点A至点B为室外行进路段,由B点进入建筑物内后,从C处楼梯上至6楼,随后通过走廊回到出发点处,即为完整的运动路径。
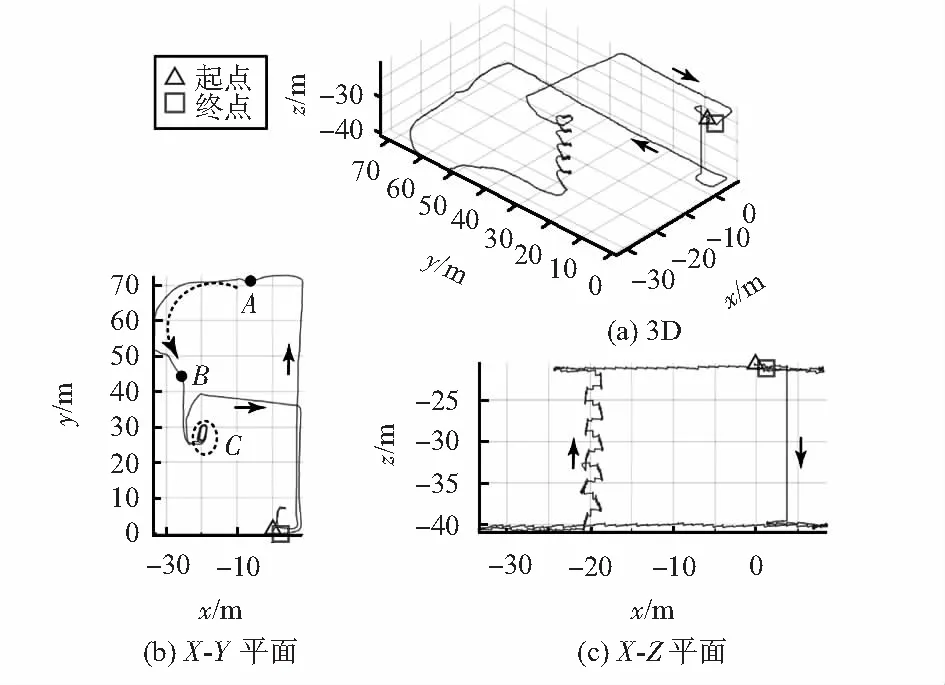
图5 组合路径实验轨迹
可见,由于将气压计应用于对海拔高度进行测量,轨迹在空间Z轴上的误差极小。经计算,完整的运动距离(total traveles distance,TTD)约330 m,轨迹还原所得起始点间的误差为1.10 m,由此可计算得系统定位误差为0.33 %。
3 结 论
本文针对实际应用中对行人室内导航系统的需求,实现了对系统软硬件及算法的设计和实现。通过将MEMS惯性传感器以及气压计安装至行人足部,利用IEZ框架,结合ZARU、HDE、气压计等多种校正方法,将传感器数据融合以获得对行人空间位置的估计。实验结果表明:系统对行人定位的空间误差在1 %以内,验证了其有效性。
猜你喜欢
意林(2021年5期)2021-04-18
哈尔滨轴承(2020年2期)2020-11-06
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
今日中国·法文版(2020年7期)2020-07-04
中国特种设备安全(2019年1期)2019-03-13
扬子江(2019年1期)2019-03-08
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
小天使·一年级语数英综合(2017年6期)2017-06-07
