
平面弹簧预紧喷射阀系统刚柔耦合仿真与实验*
2023-03-03 08:45邓圭玲张宇驰邓珺珺
传感器与微系统 2023年2期
李 广, 邓圭玲, 张宇驰, 周 灿, 邓珺珺
(1.中南大学 机电工程学院,湖南 长沙 410083;2.中南大学 高性能复杂制造国家重点实验室,湖南 长沙 410083;3.湖南工业职业技术学院 电气工程学院,湖南 长沙 410205)
0 引 言
喷射点胶作为光电封装的主流技术,要求点胶设备趋向小型化、模块化和高速化发展[1~2]。其中压电堆以其体积小、频率高、精度高、分辨率高等优点[3,4],在喷射点胶技术中得到了广泛的应用。
在喷射点胶领域已经有许多专家进行了深入研究[5~7]。文献[8]设计了一种带有杠杆式机械放大机构的喷射点胶阀,通过双压电驱动器驱动,实现了500 Hz的点胶,但是由于结构设计的限制,外形过于庞大。文献[9]设计了带有菱形放大机构的喷射点胶阀,用一种单自由度的动力学模型实现了菱形放大机构的运动分析。王凌云等人设计了一种双压电驱动的带有三角形机械放大机构的喷射点胶阀[10],最高可以实现400 Hz的稳定点胶。文献[11]设计了一种喷针与杠杆用销连接的喷射点胶阀,减小了喷针与导向件运动时的干涉,提高了喷针的速度和行程,实现了更高粘度的点胶。
以往的压电喷射阀动力学仿真都没有使用刚柔耦合模型,本文以平面弹簧预紧压电喷射阀为研究对象,通过ADAMS软件建立压电喷射阀的刚柔耦合虚拟样机模型。通过动力学仿真得到喷针的速度和位移的变化规律,并研究了不同控制参数对压电喷射阀动态性能的影响,经过实验与仿真结果对比,验证了仿真的准确性。最后通过实验分析了压电喷射阀的胶滴体积一致性。
1 平面弹簧预紧压电喷射阀的结构与工作原理
平面弹簧预紧压电喷射阀的结构如图1所示。采用两个平面弹簧对称布置,通过上端顶块和下端顶块夹紧压电堆的方式为其提供预紧力。放大机构是一种带有柔性铰链的杠杆式放大,加热棒用于控制胶液温度。首先由控制器控制加热棒将胶水加热到设定的温度。压电堆由信号发生器和功率放大器提供驱动电压,当信号发生器提供高电平时,压电堆充电并伸展。压电堆产生的力与位移迫使放大机构围绕柔性铰链中心旋转,撞针随放大机构向下运动。撞针将喷针往下压,当喷针往下运动时,喷针与胶水之间的挤压使储胶腔内的胶水变薄并向下流动。喷嘴出口处的压力逐渐增大,当喷针碰到喷嘴时,胶水被切断,喷嘴出口处的胶水形成胶滴被喷出。然后信号发生器提供低电平,压电堆恢复到初始状态。放大机构在柔性铰链刚度的作用下回复到平衡位置。喷针在喷针弹簧的作用下向上运动,与此同时,储胶腔重新补充胶水,一个循环结束。
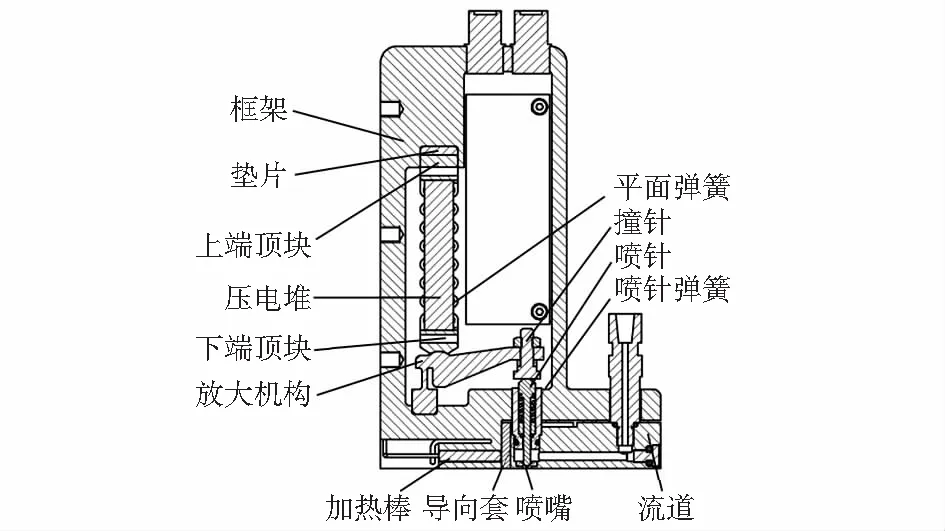
图1 平面弹簧预紧压电喷射阀
2 ADAMS仿真模型
ADAMS/View是ADAMS的一个核心模块,作为以用户为中心的交互式图形环境,提供了丰富的约束库和力库。它可以对机械系统进行静力学、运动学和动力学分析,并作出位移、速度、加速度和力的曲线。
ADAMS与SolidWorks兼容,利用SolidWorks建立喷射点胶阀零件的三维模型并装配,再将模型导入ADAMS中。使用Ansys对放大机构的柔性铰链和平面弹簧进行柔性化,生成模态中性文件(.mnf)再导入ADAMS中替换原有的刚体零件,替换后的ADAMS模型如图2所示。
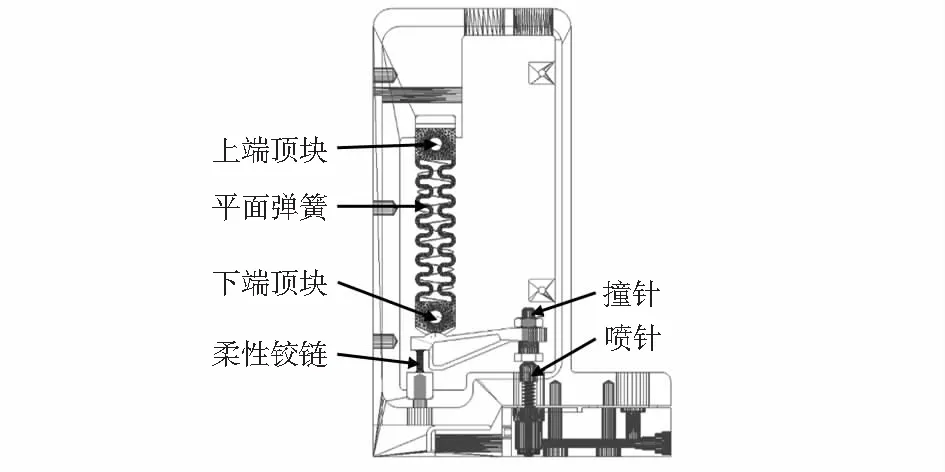
图2 ADAMS仿真模型
对各个零件进行材料设置,放大机构和平面弹簧为65Mn,喷针和喷嘴为钨钢,其余零件为不锈钢。框架固定在大地上,其余相对框架没有运动的零件设置为对框架的固定约束。柔性铰链通过固定约束与放大机构另两部分连接,平面弹簧两端的孔分别与上端顶块和下端顶块的凸台设置固定约束,喷针与套筒设置为平移副约束。使用虚拟弹簧替代喷针弹簧,添加阻尼力模拟胶液对喷针的作用;在上端顶块和下端顶块之间添加一个力和一个虚拟弹簧模拟压电堆工作;在下端顶块和放大机构之间、撞针与喷针之间和喷针与喷嘴之间添加接触力模拟零件之间的碰撞。
压电堆本质上可以看作为一个刚度极大的弹簧,因此将压电堆用弹簧代替,本文中压电喷射阀使用的压电堆是PI公司生产的P—887.91型压电陶瓷驱动器,刚度为50 kN/mm。压电堆在不同工作电压下,输出力和输出位移的关系如图3所示。
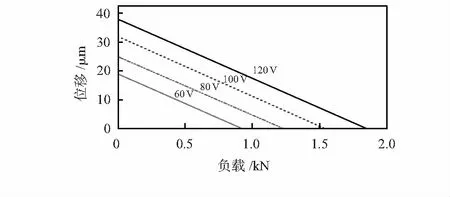
图3 压电堆特性
根据压电堆特性创建压电堆仿真模型,将压电堆等效为一个刚度为50 kN/mm的弹簧和一个加载在上端顶块和下端顶块之间的力,施加的力采用函数的形式,随时间发生大小的改变,力的函数式为
F=STEP(sin(2×π×f×t),y1,0,y2,FN)
(1)
式中f为压电喷射阀的工作频率;FN为压电驱动器在相应的电压下输出力的最大值;y1和y2为一个点胶过程中压电驱动器输出力发生变化的时间点。如图4为500 Hz频率,占空比50 %,80 V工作电压下压电驱动器的驱动力。
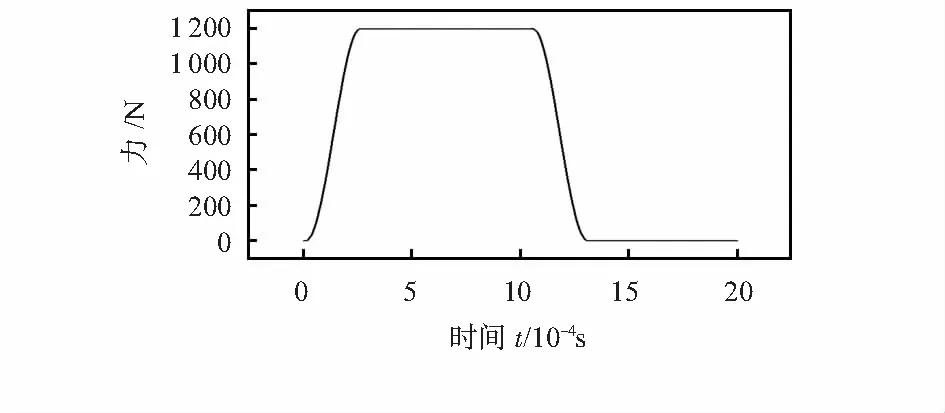
图4 压电堆驱动力
3 喷射阀动态性能仿真与实验分析
3.1 实验平台的搭建
实验平台如图5所示。
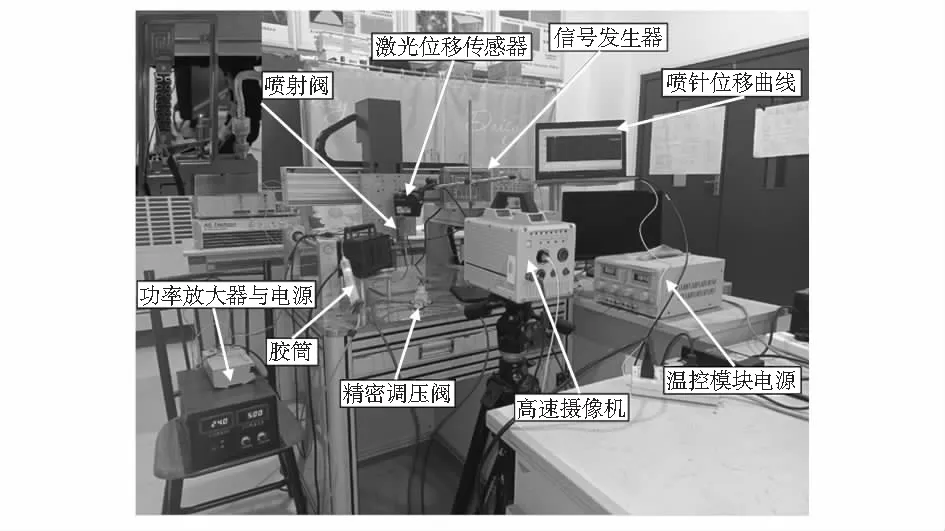
图5 实验平台
利用信号发生器输出脉冲波提供给压电驱动器专用的功率放大器,功率放大器将脉冲电压放大10倍后输入到压电堆中,利用激光位移传感器对喷射阀的撞针进行测量,获得撞针的位移曲线。忽略喷针与撞针之间的细微震荡,视喷针与撞针的运动位移情况一致。
3.2 仿真与实验对比
实验中压电喷射阀的工作频率为200 Hz,高电平为100 V,高电平和低电平时间都为2.2 ms,上升和下降时间都为0.3 ms,喷针和喷嘴之间的距离为0.09 mm。通过激光位移传感器获得实验中喷针的位移。使用相同条件进行仿真,任意选取其中2个连续的周期与实验结果对比,如图6所示。仿真结果中喷针的位移为0.097 mm,喷针与喷嘴碰撞时的速度为335 mm/s,实验结果中喷针的位移为0.09 mm,喷针与喷嘴碰撞时的速度为320 mm/s。仿真结果与实验结果较为一致,证明了压电喷射阀刚柔耦合仿真模型的可靠性。

图6 仿真实验对比
3.3 不同控制因素的影响
1)电压的影响
当电压变化范围为60~100 V时,仿真与实验结果如图7所示。
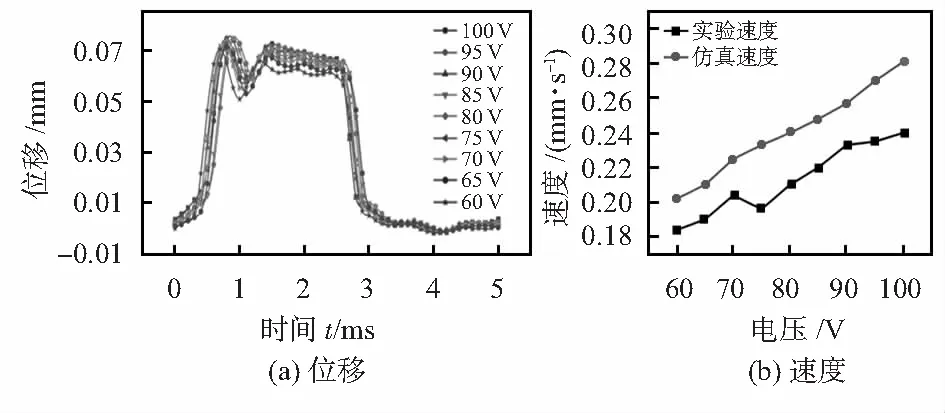
图7 电压对动态性能的影响
随着电压从60 V变为100 V,喷针的位移略微增加,位移大小从0.061 mm变为0.067 mm,增加了6 μm。随着电压的逐渐增加,喷针的速度也随之增加,这是因为电压增大,压电堆的输出力增加,喷针获得的加速度增大,喷针可以达到的速度也就越大。
2)占空比的影响
当占空比变化范围为30 %~70 %时,仿真与实验结果如图8所示。随着占空比的增加,喷针的位移大小基本没有变化,去除上下振荡,位移基本保持在0.07 mm左右。并且喷针向下运动的曲线的斜率变化不大,因此,喷针速度变化不大,基本在0.29 m/s左右,仿真与实验基本一致。
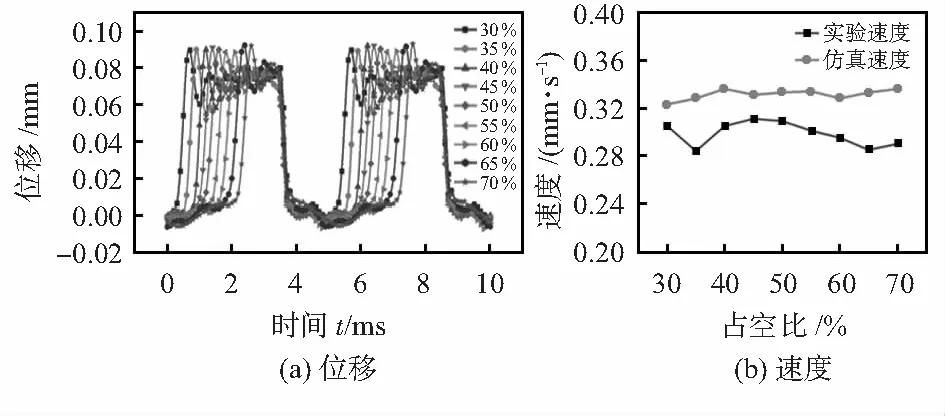
图8 占空比对动态性能的影响
3)上升时间的影响
当上升时间变化范围为0.32~0.99 ms时,仿真与实验结果如图9所示。随着上升时间的增加,喷针的位移大小基本没有变化,去除上下振荡,位移基本保持在0.07 mm左右,但是喷针向下运动的曲线斜率逐渐减小,因此,喷针速度逐渐减小。

图9 上升时间对动态性能的影响
4)频率的影响
当频率变化范围为50~500 Hz时,仿真与实验结果如图10所示。随着频率的增加,喷针的位移大小基本没有变化,去除上下振荡,位移基本保持在0.085 mm左右,喷针速度变化不大,基本在0.32 m/s左右,仿真与实验基本一致。
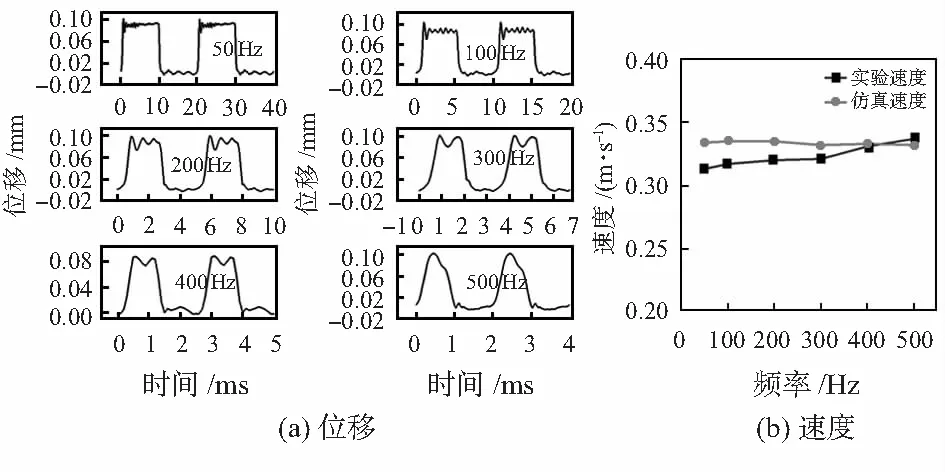
图10 频率对动态性能的影响
3.4 喷射阀胶滴一致性
高一致性的胶滴体积意味着喷射阀的稳定性高,有利于在工业上应用。对喷射阀进行48组,每组1 000滴的点胶实验。实验所用胶水密度为0.842 g/mL,使用电子天平对每组胶滴质量进行测量,测得每组实验的胶滴体积如图11所示。实验的胶滴体积的均在为39.19~40.02 nL之间,平均胶滴体积为39.59 nL,体积误差在±1.5 %以内。
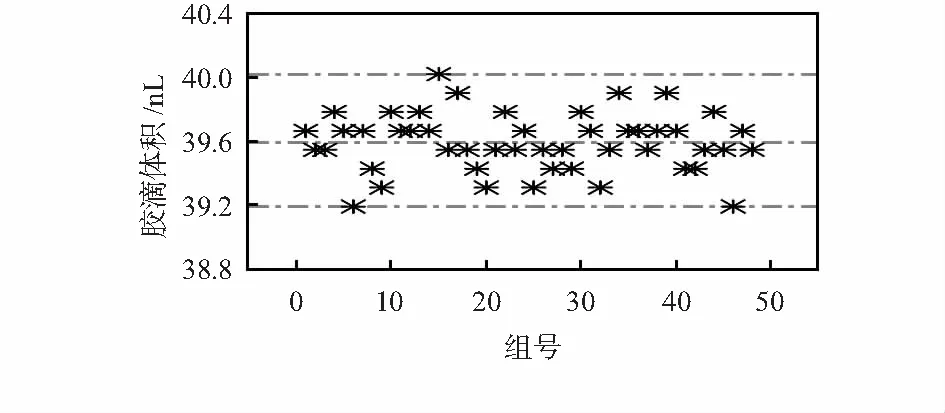
图11 喷射阀胶滴体积一致性
4 结 论
1)本文利用ADAMS创建了平面弹簧预紧压电喷射阀的刚柔耦合动力学仿真模型。通过对喷射阀的实验与仿真对比分析,验证了仿真模型的可靠性,为含有柔性零件压电喷射点胶阀的设计与研究提供了一种方法。2)压电喷射阀的动态性能主要与控制因素的电压和上升时间有关,实验表明喷针速度随着电压的增大而增大,随着上升时间的增大而减小。3)实验探究了压电喷射阀的胶滴一致性,胶滴体积的一致性不超过±1.5 %。
猜你喜欢
模具制造(2022年1期)2022-02-23
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
压电与声光(2019年1期)2019-02-22
科学与财富(2018年25期)2018-10-19
航空工程进展(2018年3期)2018-08-31
铜仁学院学报(2018年6期)2018-07-05
新高考·高一物理(2016年10期)2017-07-07
振动、测试与诊断(2014年6期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
中学生数理化·高一版(2008年12期)2008-06-15
