基于半车振动模型的轮边驱动电动车平顺性分析
2023-03-03 05:44高雄GAOXiong
价值工程 2023年5期
高雄 GAO Xiong
(福建华威钜全精工科技有限公司,福州 350001)
0 引言
针对轮边电机驱动引起的电动车平顺性问题,国内外进行了大量的研究工作。文献[1]基于轮边驱动系统非簧载质量增加恶化了车辆平顺性问题,研究了电机在不同输出扭矩下,通过调节主被悬架的参数来探讨改善车辆平顺性的可行性措施,文献[2]通过动力学模型,从理论上研究抑制驱动电机转矩波动和激振力的有效方式;文献[3]研究了电机本体中的定子形状对驱动电机振型电磁性能的影响,提出了电机设计模型、振型、激振力这三者之间的一个近似关系;文献[4]采用有限元法对驱动电机激振的电磁力波频域和时域进行了分析,研究了驱动电机激振磁力波随输入电流、转子位置的变化规律,文献[5]对某纯电动汽车的固有振动频率、车速及路面不平度之间的关系进行了研究。
分析过往的研究,通常以簧载质量、电机激振、路面不平度中的某个来研究轮边驱动电动车的平顺性,而以电机-路面耦合激励作用的研究较少。
本文基于电机和路面耦合激励的半车四自由度振动模型,采用白噪声滤波法对时域内的随机路面进行平顺性仿真分析,探究在电机-路面耦合激励作用下的轮边驱动电动车平顺性的影响及研究方法。
1 半车振动模型的建立
1.1 半车四自由度模型
为研究轮边电机驱动电动车的平顺性,本文采用如图1所示的振动模型。
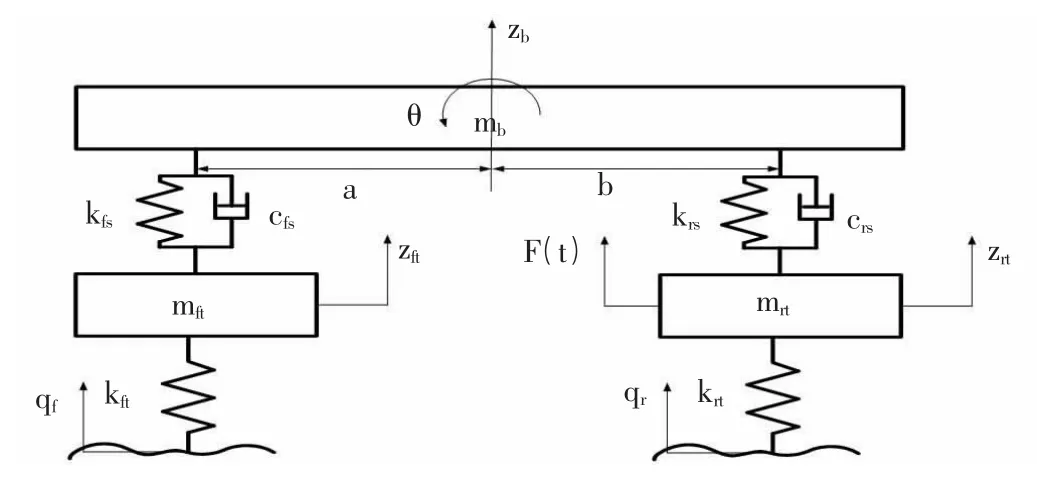
图1 半车四自由度振动模型
其运动微分方程如下:
式中,{z}为位移向量;{q}为路面激励向量;[m]为质量矩阵;[c]为阻尼矩阵;[k]为刚度矩阵;[kf]为与路面激励对应的矩阵。
1.2 平顺性评价指标
式中,n为采样点个数,a为振动加速度。
2 半车模型的平顺性分析
2.1 电机激振力
电机转速与车速之间的关系可以表示为:
Rr为车轮半径Rr=0.36m;i为传动比i=10.6。
通过公式计算电机随机振动的激振力难度比较大且影响准确度。本文的电机激振力采用台架试验实测得到,电机在500rpm下的电机垂向加速度时域信号和垂向激振力时域信号如图2所示。
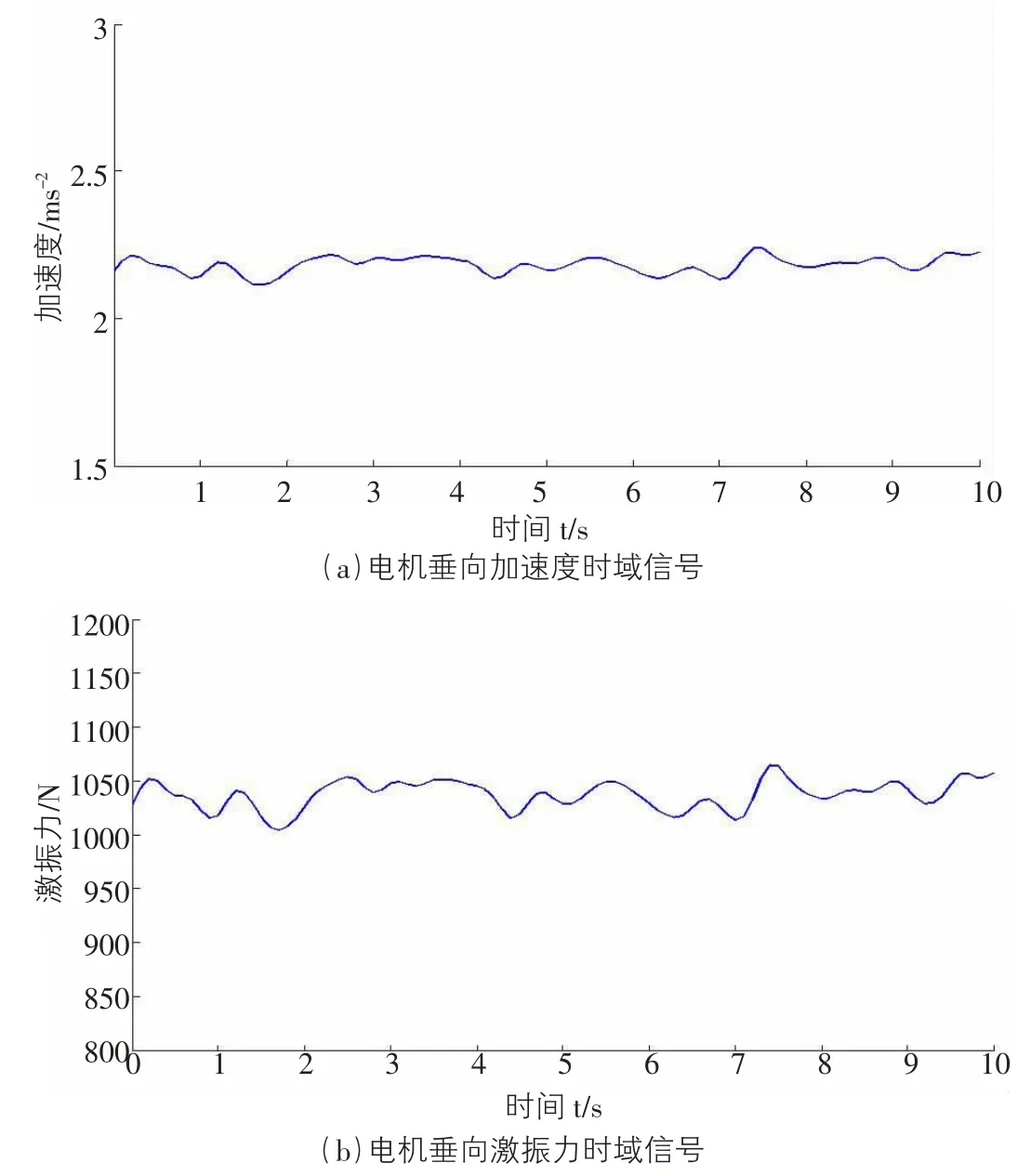
图2 电机垂向激振力测试与信号
2.2 路面激励
基于白噪声滤波方法的路面随机激励时域描述如下:
后轮所受路面激励qr与前轮所受路面激励qf之间的关系如下:
2.3 车辆参数及仿真
基于上述的分析,建立半车四自由度模型,采用Simulink软件对轮边驱动电动车进行平顺性仿真,仿真所需的车辆参数如表2所示,以B级路面作为随机路面激励的输入,两种激励结果如表3、表4所示。

表2 车辆仿真参数

表3 路面激励下的仿真数据
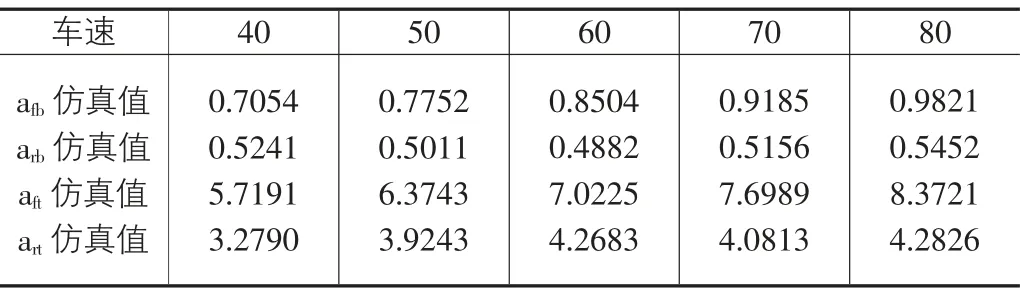
表4 电机-路面激励双激励下仿真数据
3 两种不同激励的比较分析
图3进一步说明了两种不同激励下系统的振动特性。
车辆车身加速度均方根值比较,由图3(a)可知:考虑电机激振力后车身加速度振幅明显变大,在初始的3s内表现尤为明显,在时间相位上更为延迟,即达到稳定所需更长时间。
车辆悬架动挠度加速度均方根值比较,由图3(b)可知:考虑电机激振力后车辆悬架动挠度在初始的2s内表现尤为明显,特别在车辆起步阶段,可见电机激励影响效果显著。
车辆轮胎动载荷均方根值比较,由图3(c)可知:考虑电机激振力后车辆悬架动挠度在初始的2s内表现尤为明显,特别在车辆起步阶段。
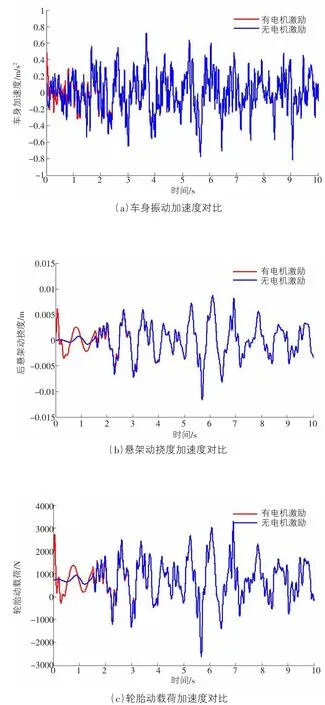
图3 两种不同激励下系统的振动特性
从以上的分析可知,驱动电机的垂向激振力对轮边驱动电动车的平顺性影响显著,不能忽略。因此,有必要对车辆的部分参数进行优化。
4 平顺性优化及仿真分析
采用AMGA法对表1参数进行优化进行多目标优化,优化后的目标参数如表5所示,其他的参数与表1一致。

表1 车速与电机转速关系表

表5 优化后的部分参数
优化前后系统的振动特性仿真效果如图4所示。
从图4可知,优化后系统的振动特性比优化前提升显著,车身振动加速度下降了7.2%;轮胎动载荷加速度下降了13.6%;尤其悬架动挠度加速度均方根值下降了27.6%,说明优化后的车辆平顺性提升明显。

图4 优化前后系统的振动特性比较
5 结论
①本文考虑了电机—路面耦合激励作用的轮边驱动电动车平顺性影响因素,建立了电机—路面耦合激励作用的半车四自由度模型,分析了有无电机激励的系统响应差别。
②仿真分析了以B级路面为代表的不同车速下的车辆平顺性。结果表明在同一路面与车速下,电机激励对轮边驱动电机的平顺性影响明显,特别在起步阶段。
③优化后系统的振动特性比优化前提升显著,尤其是悬架动挠度加速度均方根值。验证了该系统模型及优化的有效性,为后续研究轮边驱动电动车在路面、电机双激励源下平顺性分析提供了思路与方法。
猜你喜欢
装备制造技术(2020年2期)2020-12-14
疯狂英语·新悦读(2019年11期)2019-12-18
今日农业(2019年12期)2019-08-15
舰船科学技术(2017年7期)2017-08-02
专用汽车(2015年4期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
汽车与新动力(2012年5期)2012-03-25
cookie world(2010年5期)2010-06-10