
拉曼-米激光雷达探测对流层气溶胶与水汽研究
2023-03-02 03:17孟淑贤王守亚吴神兵孟德硕
太原师范学院学报(自然科学版) 2023年4期
赵 明,孟淑贤,张 科*,王守亚,吴神兵,孟德硕
(淮南师范学院 电子工程学院,安徽 淮南 232038)
0 引言
气溶胶和水汽均为对流层大气中活跃的微量成分,对气象、气候和大气环境有着重要的影响.气溶胶是指悬浮在大气中的固体和液体微粒,它通过吸收和散射太阳辐射,影响着地-气系统的能量收支[1];同时与大气中的气体组分发生非均相反应,影响大气化学进程[2];另外,气溶胶是主要的大气污染物之一,影响着人们的身体健康[3].水汽在红外波段有着丰富的吸收带,能够吸收一部分太阳辐射和下垫面辐射,是重要的温室气体[4];另外,水汽在大气动力学、气象学、全球水文循环中扮演着重要的角色[5-7].气溶胶和水汽还是成云和降水过程中的关键因素[8].气溶胶和水汽的这些重要作用与其时空分布特征有着密切关系,因此,准确、及时地测量气溶胶和水汽的垂直分布,对大气科学研究、气象预报、环境监测具有重要意义.
目前,能够同时探测气溶胶和水汽垂直廓线的手段较少.借助探空气球、系留飞艇、机载平台等进行原位探测,可以获得气溶胶和水汽的垂直分布特征,但无法实现长时间的连续观测[9-11].激光雷达[12,13]作为一种主动光学遥感设备,具有时空分辨率高、精度高、可连续观测等优势,适用于大气参数的垂直探测.激光在传输过程中,与大气分子发生多种散射作用,其中拉曼散射相对于入射激光发生频移,并且频移大小仅取决于散射分子的成分[14].因此,由拉曼散射回波信号强度,可反演出特定气体成分的浓度.拉曼-米激光雷达[15,16]具备同时接收大气分子和气溶胶的瑞利-拉曼-米散射信号的能力,可同步观测气溶胶光学参数和水汽混合比的垂直廓线.
本文采用希腊Raymetrics公司生产的LR112-D400型拉曼-米激光雷达,首先给出了激光雷达的系统结构和主要技术参数,然后介绍了探测气溶胶和水汽的基本原理和数据反演方法,最后对该系统在南京地区的一次典型观测结果进行分析和讨论.
1 拉曼-米激光雷达结构
LR112-D400型拉曼-米激光雷达的仪器外观和系统结构分别如图1(a)和(b)所示.该仪器主要分为发射系统、接收系统、信号探测和采集系统、控制系统四个部分.发射系统采用355 nm脉冲激光器,激光脉冲经3倍扩束镜后,发散角被压缩至0.4 mrad以下,并垂直发射到大气中.接收系统采用400 mm口径的卡塞格林式望远镜,用于收集大气散射回波.大气散射回波经过分色、滤波,被分别导入355 nm、387 nm、408 nm三个探测通道.其中355 nm通道接收气溶胶米散射信号和大气分子瑞利散射信号;387 nm通道接收氮气分子的拉曼散射信号;408 nm通道接收水汽分子的拉曼散射信号.三个探测通道的光信号被光电倍增管(Photomultiplier tube,PMT)接收,转化为电信号,并由瞬态记录仪(TR40-160,德国Licel公司)采集.瞬态记录仪的采样频率为40 MHz,根据光速计算,可得对应的距离分辨率为3.75 m.由工控机控制整台系统的运行,并储存和显示探测数据.激光雷达系统主要技术参数见表1.拉曼-米激光雷达系统可实现连续观测,一般设置为每15 min测量一组数据,每次测量发射3 000发激光脉冲进行累积,以提高信噪比.测量间隔时间和每组激光脉冲数均可设置.
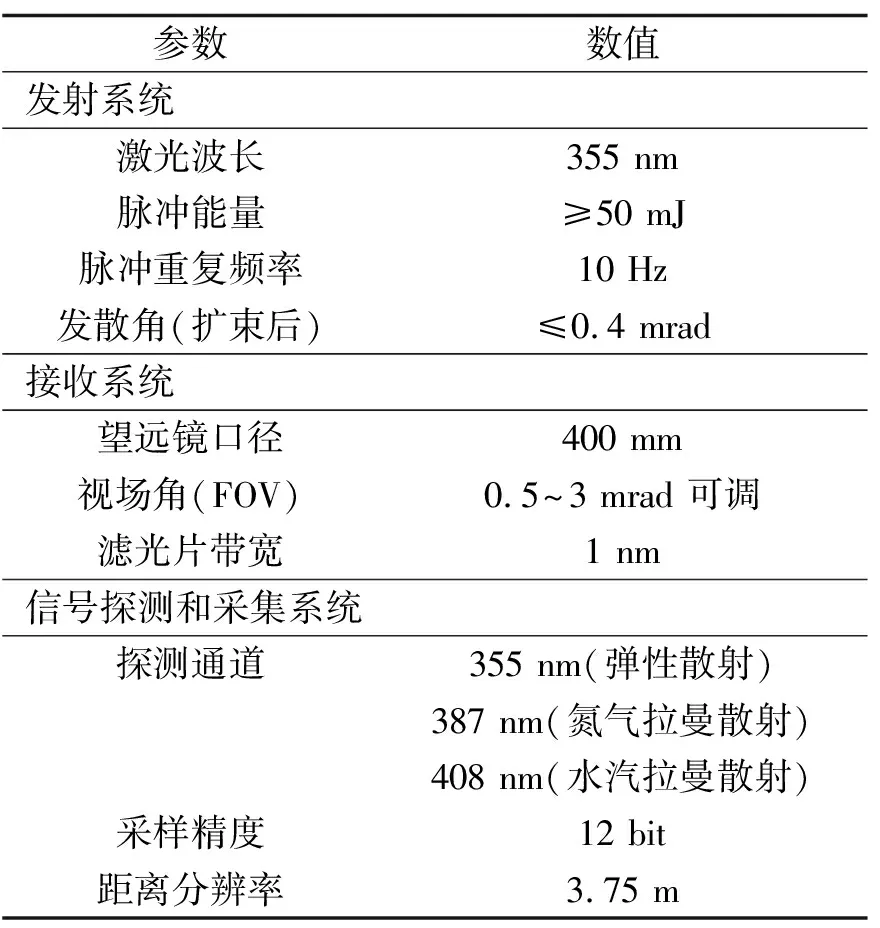
表1 激光雷达系统主要参数
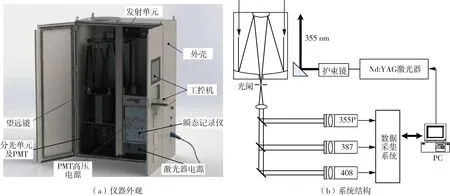
图1 拉曼-米激光雷达的仪器外观和系统结构
2 探测原理
拉曼-米激光雷达可根据355 nm通道信号反演气溶胶消光系数廓线,并由气溶胶垂直分布特征得到大气边界层高度变化;根据408 nm信号和387 nm信号的比值,计算水汽混合比廓线.下面对各参数的探测原理和数据反演方法进行介绍.
2.1 气溶胶消光系数
激光在传输过程中,与大气分子和气溶胶分别发生瑞利散射和米散射.这两种散射与发射激光的波长一致,均为355 nm,因此统称为弹性散射[14].激光雷达接收到的信号强度廓线,可以用激光雷达方程表示:
(1)
其中P(z)为高度z处的回波信号强度;K为激光雷达系统常数,包括激光能量、光学效率、探测器量子效率等;O(z)为系统收发重叠因子[17],对于本系统,重叠因子在500 m以上高度为1;β和α分别表示大气成分的后向散射系数和消光系数,下标m和a分别代表大气分子和气溶胶.方程中的βm(z)和αm(z)可由标准大气模型中的温度和压强廓线计算得到[18],而气溶胶光学参数βa(z)和αa(z)均为未知数,为求解方程,需假设两个参数之间的关系.根据Fernald方法[19],假设气溶胶消光系数与后向散射系数之间的比值,即激光雷达比[20]为常数,即可求出气溶胶的消光系数:
(2)
其中X(z)=P(z)·z2,为距离平方修正信号;Sm为大气分子的激光雷达比,等于8π/3;Sa为气溶胶的激光雷达比,这里假设为30 Sr;zc为标定点高度,一般选在对流层顶附近的洁净区域,并假定已知此处的气溶胶消光系数.
2.2 水汽混合比
激光在大气中传输,除了与大气发生弹性散射,还会与氮气分子和水汽分子发生拉曼散射.对于355 nm的发射激光,氮气和水汽分子的拉曼散射波长分别为387 nm和408 nm.通过水汽拉曼信号和氮气拉曼信号的比值,可以计算水汽混合比[21]:
(3)
其中,λR,N和λR,w分别是氮气分子和水汽分子的拉曼散射波长;Cw是水汽混合比标定常数.它是由两个拉曼通道的系统常数和一些物理常数决定的:
(4)
式中kN和Kw分别为氮气拉曼通道和水汽拉曼通道的系统常数;nN和ndry分别是大气中的氮气分子数密度和干空气分子数密度;Mw和Mdry分别是水汽分子和干空气分子的摩尔质量;σN和σw分别是氮气分子和水汽分子在发射激光波长的拉曼散射截面.
T(λR,N,z0,z)和T(λR,w,z0,z)分别是激光雷达(高度为z0)到高度z之间的大气在波长λR,N和λR,w上的透过率:
(5)
它们的比值称为大气透过率校正项.
实际工作中,Cw一般通过与无线探空仪的水汽数据对比获得;大气透过率校正项由激光雷达测得的气溶胶光学参数计算得到;根据(3)式,即可反演水汽混合比.
2.3 边界层高度
气溶胶主要集中在边界层内,由于湍流作用,边界层内的气溶胶混合较为均匀,但在边界层顶附近,气溶胶含量急剧减少,因此,激光雷达回波信号也会在边界层顶急剧减小.根据气溶胶分布的这一特征,本台激光雷达采用梯度法,以355 nm距离平方信号X(z)的梯度绝对值最大处,即信号减小最快处,作为边界层高度[22].
3 观测结果
图2所示为2019年10月19日0时至21日0时,在南京大学仙林校区所测得的数据.图2(a)所示为气溶胶消光系数在0.4~5 km高度范围随时间的变化,图中的白色点迹标示出了边界层高度.由图可见,早上7:00左右边界层高度最低,受下垫面温度升高影响,湍流增强,边界层高度上午和中午逐渐升高,至15:00前后达到最大高度,随后开始下降.10月19日边界层高度的最大值和最小值分别为1.65 km和0.98 km;10月20日边界层高度的最大值和最小值分别为1.39 km和0.56 km.气溶胶主要聚集在边界层内,边界层顶以上的气溶胶含量稀少.在本次观测期间,边界层内的气溶胶消光系数在0.19~0.62 km-1之间变化.图2(b)所示为水汽混合比的时空分布,由于水汽拉曼信号很微弱,白天受天空背景光影响,信噪比很差,因此,图中只给出了夜间的观测结果.由图2(b)可见,边界层内水汽较为丰富,水汽混合比在3.3~7.7 g/kg之间.边界层之上存在着较稀薄的水汽层,这一水汽层的高度上限可延伸至2.5~4.5 km,水汽混合比约为1.0~2.6 g/kg.
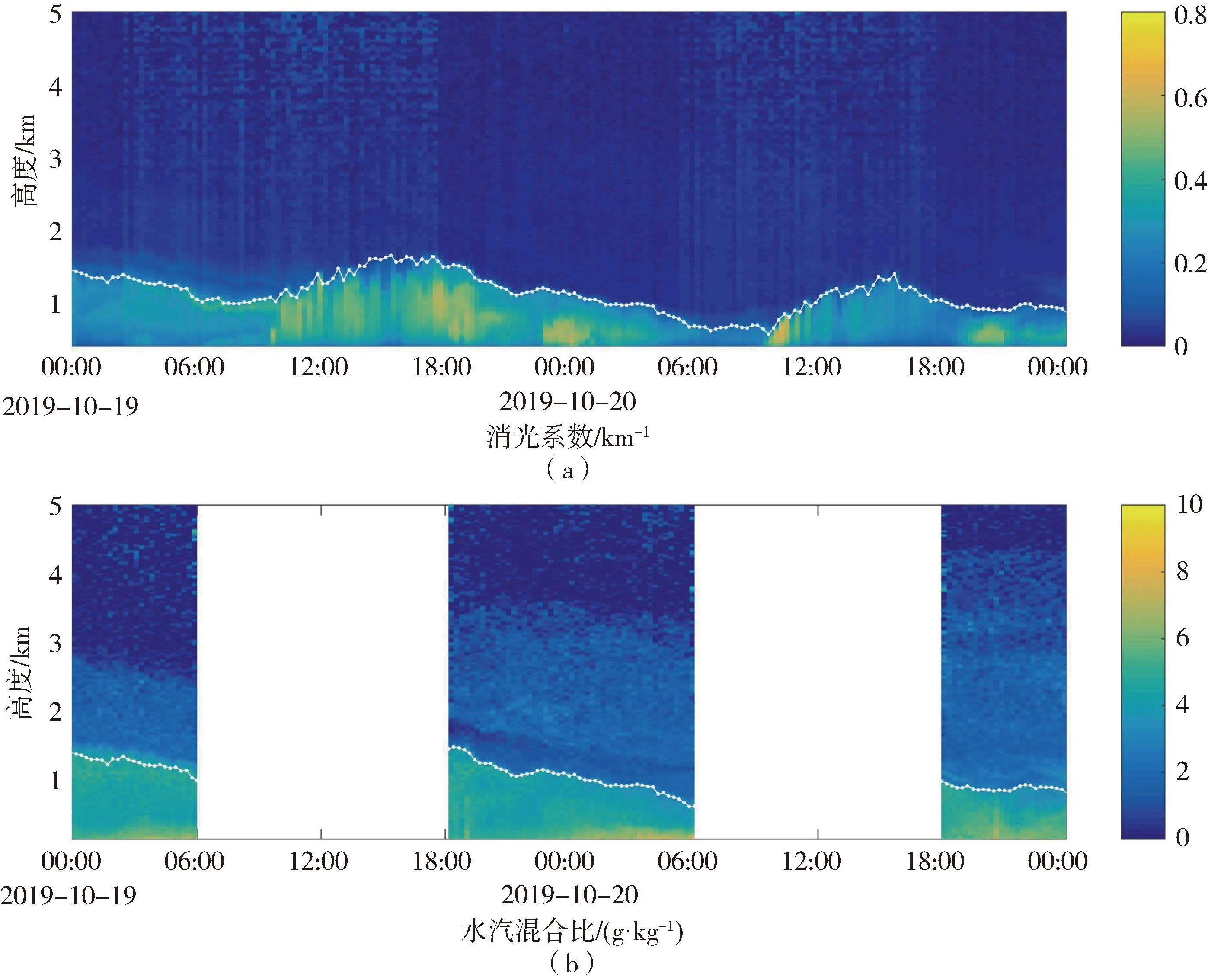
图2 气溶胶消光系数、水汽混合比、边界层高度的时序变化图
边界层高度降低通常会导致气溶胶和水汽向低空聚集,以10月19日夜间到20日凌晨的大气垂直廓线变化情况为例,说明这一现象.图3(a)和(b)所示分别为0.15~4.5 km的气溶胶消光系数和水汽混合比廓线,其中绿色实线为10月19日夜间19:26的大气参数廓线,红色实线为10月20日凌晨03:32的大气参数廓线,绿色虚线和红色虚线分别对应这两个时刻的边界层高度.在此期间,边界层高度由1.34 km降低至0.97 km,气溶胶层和水汽层均随之下沉,造成近地面的气溶胶消光系数和水汽混合比均增大.在距离地面200 m处,气溶胶消光系数由0.40 km-1增大至0.56 km-1,水汽混合比由5.3 g/kg增大至7.2 g/kg.
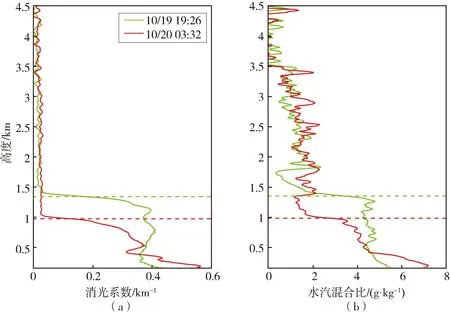
图3 不同时刻的气溶胶消光系数、水汽混合比,以及边界层高度
4 结语
本文介绍了LR112-D400型拉曼-米激光雷达的系统结构、主要技术参数、工作原理和数据处理方法,并利用该系统对南京地区的气溶胶和水汽进行连续观测.观测过程为期两天,期间天气晴好.观测结果显示,边界层高度在早上7:00左右最低,下午15∶00左右最高,呈现出了典型的日变化特征.气溶胶主要集中在边界层内,消光系数在0.19~0.62 km-1之间变化.受白天背景光影响,水汽仅在夜间观测.边界层内水汽含量较为丰富,水汽混合比在3.3~7.7 g/kg之间;在边界层以上的自由对流层中部,存在较为稀薄的水汽层,水汽混合比为1.0~2.6 g/kg.随着边界层高度降低,气溶胶和水汽下沉,造成近地面气溶胶消光系数和水汽混合比均增大.观测结果表明,拉曼-米激光雷达具备连续观测对流层气溶胶和水汽垂直分布的能力,在大气科学研究、气象预报、大气环境监测等领域具有重要的应用价值和发展潜力.
猜你喜欢
风流一代·经典文摘(2023年5期)2023-05-21
家庭医学(下半月)(2020年7期)2020-08-24
航空发动机(2020年3期)2020-07-24
四川环境(2019年6期)2019-03-04
电子测试(2018年18期)2018-11-14
高原山地气象研究(2016年2期)2016-11-10
光学精密工程(2016年1期)2016-11-07
应用数学与计算数学学报(2015年1期)2015-07-20
数学年刊A辑(中文版)(2014年2期)2014-10-30
沙漠与绿洲气象(2014年1期)2014-03-20
