
基于降噪多分支CNN和注意力机制的滚动轴承故障诊断方法*
2023-03-02 06:59:42吴海军周华西
组合机床与自动化加工技术 2023年2期
刘 俊,吴海军,周华西
(1.江苏电子信息职业学院数字装备学院,淮安 223003;2.上海交通大学机械系统与振动国家重点实验室,上海 200001;3.南京理工大学机械工程学院,南京 210094)
0 引言
滚动轴承的健康状况对机械系统的稳定运行具备重要影响,但高速变载的恶劣工作环境不仅容易使其发生故障,还会对其采集信号产生强烈干扰[1]。研究在强噪声环境下的轴承故障诊断技术对故障的及时发现、机械系统的安全运行具有重大意义。
传统的信号处理方法如奇异值分解(singular value decomposition,SVD)、经验模态分解(empirical mode decomposition,EMD)、独立分量分析及小波阈值降噪被广泛应用于滚动轴承的故障特征提取[2-4];虽取得良好的诊断效果,但大多存在以下问题:①识别方法均是针对某种特定情况下专门设计的,泛化能力较差;②人工提取的方法难以获取轴承故障的深层特征;③当噪声干扰强度增大到一定程度后,很难直接从采集信号中提取出轴承特征频率。
随着人工智能技术的高速发展,基于深度学习的特征提取技术成为机械部件故障诊断的强有力工具[5-6]。卷积神经网络凭借其强有力的非线性映射特性和深度特征自适应提取能力成为当前轴承故障诊断的主流方法。赵小强、吴楠等[7-8]虽证实了CNN在轴承故障诊断中有效性,但未能考虑到轴承实际运行中的强噪声干扰。昝涛等[9]结合信号谱分析和CNN对强噪声环境下进行轴承故障诊断,但其在信噪比(signal-to-noise ratio,SNR)为10 dB下的诊断正确率仅为56.4%;董绍江等[10]以SVD和EMD降噪处理的信号作为输入,利用注意力机制驱动的CNN中进行识别,虽然在强噪声环境下表现良好,但其基于SVD和EMD的信号处理过程需要消耗大量的计算成本;刘恒畅等[11]结合多分支网络架构结和可分离CNN在SNR为-2 dB环境下的实现了准确率为91.2%的轴承故障识别,但与其在SNR为8 dB时的99.6%准确率相比产生了较大的落差,说明其模型在抵抗噪声干扰方面仍有待提高。
因此,本文提出一种基于降噪多分支CNN和注意力机制的滚动轴承故障诊断方法,设计对始信号及其频谱、滤波信号同步处理的多分支CNN特征提取结构;并引入注意力机制对各分支的输出进行权重分配,在增强有效信息的同时抑制无效信息对诊断结果的影响。实验结果证明了本文方法在强噪声干扰下对轴承故障识别的有效性和鲁棒性。
1 基础理论
1.1 卷积神经网络
CNN强大的特征提取能力源于自身的3个重要特性:参数共享、稀疏交互、等变表示。通过卷积核以局部连接的方式在整体输入信号上进行特征提取,CNN具有良好的模型泛化能力以及出色的训练速度[12]。在信号处理方面,由于输入信号大多为一维时序传感器信号,目前用于故障诊断的CNN大多是一维CNN(one-dimensional CNN,1-D CNN)。1-D CNN不仅继承了CNN强大的特征提取能力和非线性映射能力,还由于自身结构从二维到一维的简化提升了运算速度。典型的1-D CNN通常由输入层、多个交替连接的卷积层和池化层、全连接层和最终的输出层构成。以x表示卷积层的输入信号,卷积层的计算可表示为:
(1)
式中,w为卷积核的权重;b为偏执单元;conv1D()为卷积操作;h为隐藏层的输出;y为卷积层的输出;本文采用ReLU()作为激活函数,其目的是防止神经网络训练过程中出现梯度消失现象。在卷积层之后紧接着是池化层,有:
x′=maxpool(y,s)
(2)
式中,x′为经由一个卷积层和池化层映射后的输出;s为池化核尺寸,本文选择最大值池化,其作用是输出为池化范围内的最大神经元数值。池化层赋予了1-D CNN等变表示的能力,提升了网络的泛化能力和抗干扰能力。

(3)

1.2 注意力机制
注意力机制作为深度学习模型中的一种特殊嵌入结构,可以在模型训练过程中自动学习和计算输入数据对输出结果的贡献大小,并广泛应用于图像识别、自然语言处理等领域[13]。在基于1-D CNN的故障诊断模型训练过程中,由于深度神经网络的自适应学习机制,不同通道提取的故障特征存在着一定的差异性,其中既包含了对实现故障识别有显著贡献的特征,也存在贡献低、甚至起负激励的特征。因此,将注意力机制引入深度学习模型,可以对输入中每个部分实现不同的权重分配,从而抽取出更加有效及重要的特征,提升模型的自适应能力及准确性。
如图1所示介绍注意力机制的工作原理,其中Z=[z1,z2,…,zn]为包含n个通道的输入,zi∈RH×1表示第i个通道的特征。首先,如式(4)所示,利用平均池化操作avgpool()将输入Z的通道特征zi进行压缩,获取具备表征该通道全局信息的向量a=[a1,a2,…,an]。
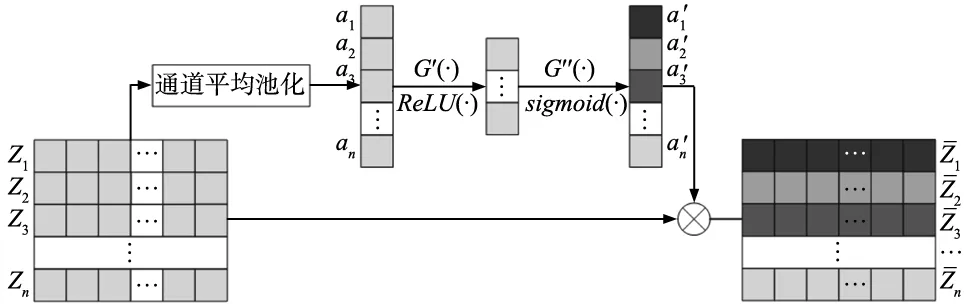
图1 注意力机制的工作原理
(4)

(5)

(6)
式中,⊗表示矩阵对应元素间的点乘。
2 本文方法
2.1 模型概览
本文所提出的基于降噪多分支CNN和注意力机制的诊断模型如图2所示。以轴承监测的原始振动信号为输入,首先分别利用快速傅立叶变换(fast fourier transform,FFT)和高斯滤波得到原始信号的频谱和滤波信号;然后将原始信号、信号频谱、高斯滤波信号分别输入到均由1-D CNN构建的直接映射分支、频谱映射分支和高斯降噪分支的多分支1-D CNN中实现特征提取;随及将多分支CNN提取的多通道特征作为注意力网络输入,获取经由注意力加权的输出;最后将加权后的分支输出作为分类CNN的输入,实现滚动轴承故障模式的端到端识别。

图2 本文模型
2.2 信号处理
本文方法首先将原始信号进行FFT和高斯滤波处理,其中FFT[14]被广泛应用于时域信号的频谱获取,本文不再赘述。高斯滤波属于线性平滑滤波,广泛应用于高斯噪声的消除,其降噪过程本质上是经由本身和邻域范围内的其他数据点进行加权平均的过程。由于机械运转过程中的干扰噪音属于独立不同源分布,经由叠加后对轴承本身的影响近似于高斯白噪声影响[15-16]。因此,本文选择高斯滤波信号作为多分支CNN中的滤波降噪分支的输入。由于传感器数据均为一维离散的时序信号,故本文选取一维高斯离散滤波函数进行滤波处理,其表达式为:
(7)
式中,m为滤波半径,由于是高斯离散滤波,半径对应信号点个数,所以m为正整数;δ为高斯滤波函数的标准差,其大小直接影响高斯离散滤波过程中周围数据点对滤波结果的权重,本文中取m=2,δ=1。
2.3 模型架构
本文模型中的多分支CNN和分类CNN均采用1-D CNN作为基础结构进行构造。其中,多分支CNN中每个分支的CNN结构完全相同,均只包含两个相互交替的卷积层和池化层。分类CNN同样由包含两个卷积层和池化层的1-D CNN构成,但与传统1-D CNN经卷积池化映射后利用全连接层实现预测输出不同,本文中分类CNN采用全局平均池化层实现最终预测结果的输出。相较于全连接层参数多、计算量大、易产生过拟合等缺点,全局平均池化层不仅可以对神经网络中的参数数量进行缩减,提升训练速度;另一方面还能避免深度神经网络发生过拟合问题。全局平均池化层的计算表达式为:
(8)

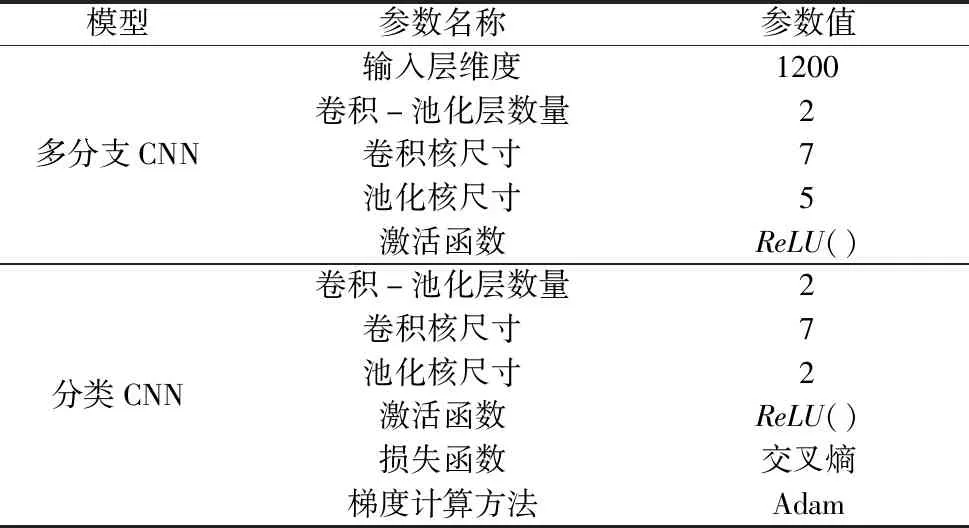
表1 故障类别
3 试验验证
3.1 数据集构造
为了验证本文模型在面向强噪声环境下的抗噪性和有效性,选取某大学轴承数据集为研究对象[17],在其采集信号的基础上人为添加高斯白噪声,获取包含不同SNR的数据集。式(9)为SNR计算公式。
(9)
式中,Ps为信号的有效功率;Pn为噪声的有限功率。
试验选取轴承数据集中转速为1772 r/min时驱动端的加速度传感器信号,其对应轴承型号为SKF6205-2RS,信号采样频率为12 kHz。如表2所示,构造的基础数据集由包含正常状态、内圈故障、外圈故障以及滚动体故障在内的10类轴承故障状态构成,以重采样的方式构造采样点数为1200的数据样本,每类故障状态对应的样本数为320,最终构成包含10类共3200个数据样本的基础数据集。在此基础上,基于式(9)向基础数据集中添加高斯白噪声,构造SNR分别为-5 dB、0 dB、5 dB、10 dB和15 dB的数据集。如图3所示,以轴承内圈故障信号为例,展现了原始信号及不同SNR值的加噪信号时域波形。由图可知,随着噪声强度的不断增加,信号中因内圈故障引起的周期性脉冲越来越不明显,表明轴承的故障特征逐渐被加入的噪声所淹没。
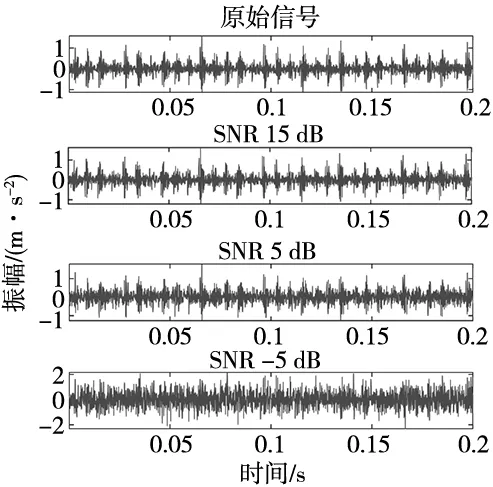
图3 原始信号及加噪信号时域波形
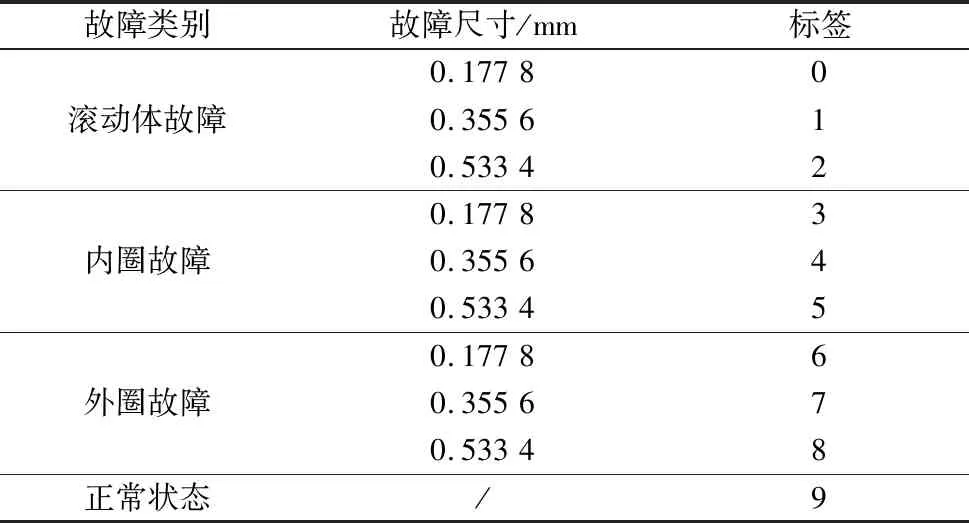
表2 故障类别
3.2 模型建立
以SNR为5 dB的情况为例,介绍本文模型的训练过程。图4中展现了模型训练过程的损失曲线及识别精度,可以看出本文模型在SNR为5 dB的情况下,迭代30次之后基本收敛,且识别精度稳定保持在99%以上。进一步地,利用混淆矩阵将模型各个类别的分类结果可视化如图5所示,可以看出本文模型在轴承内圈故障、外圈故障以及滚动体故障上均取得突出的诊断效果,能够准确分辨出轴承故障的强弱程度,仅在故障类别3(滚动体故障,故障尺寸0.021 ft)上未实现100%的准确诊断。
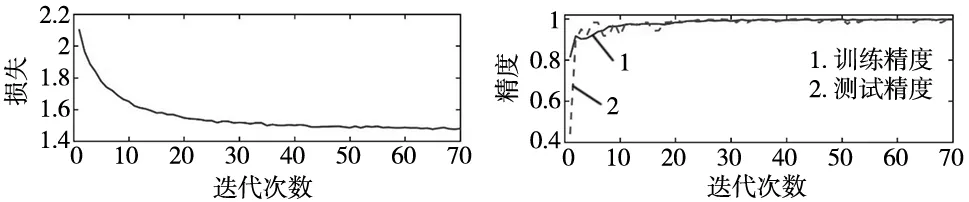
(a) 训练损失曲线 (b) 训练及预测识别精度图4 模型训练过程
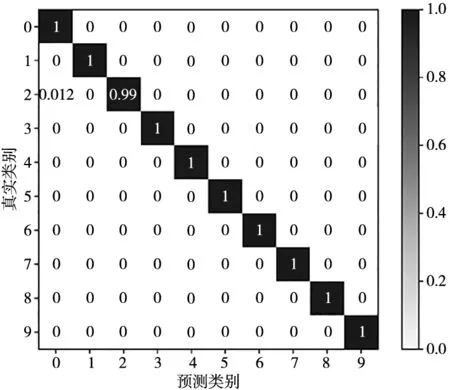
图5 诊断结果混淆矩阵(SNR=-5 dB)
3.3 对比分析
为了进一步验证本文提出方法的有效性,以支持向量机(support vector machine,SVM)、BP神经网络、1-D CNN为对象开展对比实验研究。其中SVM的核函数选择高斯核函数;BP神经网络由1个输入层、2个隐藏层及1个输出层共4层网络构成,神经元数分别为1200、512、256和10;1-D CNN的卷积部分包含3个交替连接的卷积层和池化层,全连接层由1个输入层、1个隐藏层和1个输出层构成。对比实验中所有模型使用相同的训练集和测试集,并在五种不同SNR下对模型的诊断能力进行评估。图6所示为SNR为5 dB的情况下,采用BP神经网络以及CNN方法的模型训练过程的损失曲线及识别精度。所有模型在每种SNR情况下均重复实验10次,其最终的平均诊断正确率和标准差如图7所示。
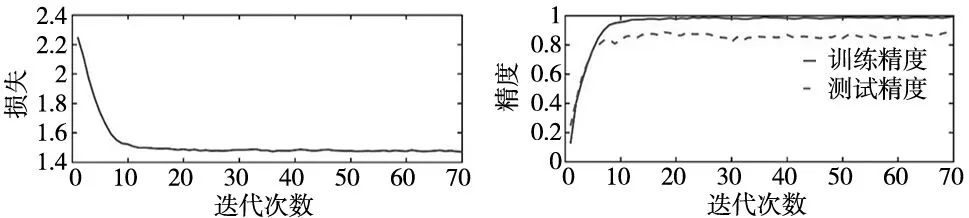
(a) BP神经网络训练损失曲线 (b) BP神经网络训练及预测识别精度
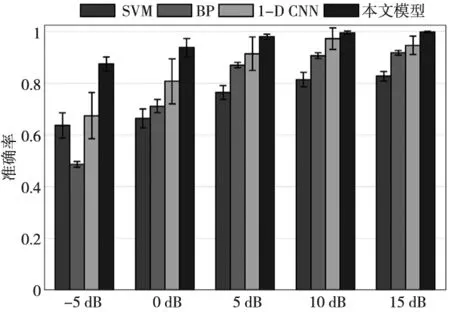
图7 不同模型对比实验结果
从实验结果可以看出,本文模型在-5 dB~15 dB的所有SNR水平下均取得了最优的诊断结果,且在0 dB的强噪声干扰下,仍取得的高达93.79%的诊断精度。在所有对比模型中,SVM模型的诊断精度相对较弱,即使在15 dB水平下也仅获得82.76%的诊断正确率,说明在噪声干扰下浅层机器学习模型相对于深层网络模型的特征提取能力较弱。此外,从1-D CNN和本文模型在SNR从低到高时诊断正确率的变化过程可以看出,在10 dB和15 dB的低SNR情况下,1-D CNN作为深层神经网络其诊断精度与本文模型差距较小,也能取得高于95%的诊断正确率;而随着噪声强度增加,1-D CNN与本文模型在诊断正确率上的差距逐渐拉大,在-5 dB水平下的诊断正确率相差接近20%,进一步证明了本文模型具备对强噪声环境的抗干扰能力。
3.4 模型分析
为了进一步论述本文模型多分支结构和注意力机制的有效性,在本文模型的基础上取消注意力机制,并将模型的输入改为仅原始信号、仅信号频谱和仅高斯滤波信号,其训练的模型分别记作原始信号模型,频谱信号模型和高斯滤波模型。各模型在不同SNR情况下均重复实验10次,其平均诊断正确率和标准差如图8所示。
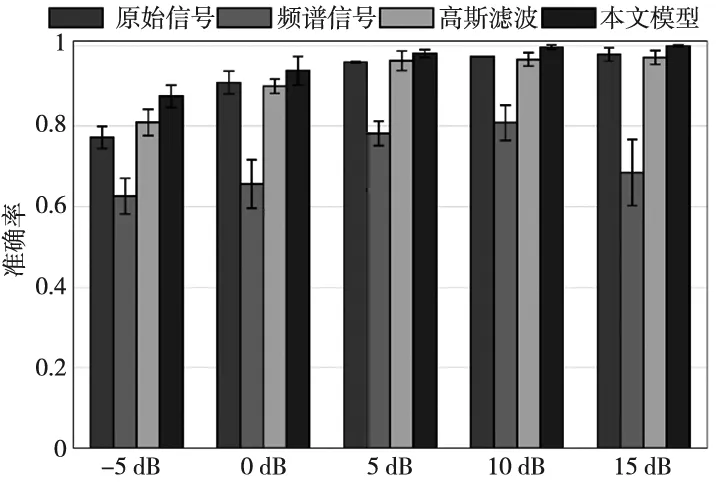
图8 不同输入对比实验结果
实验结果表明,本文多分支结构和注意力机制能在所有SNR水平下均能帮助模型获取更高的故障识别精度;且相较于噪声干扰较弱的高SNR情况,多分支结构和注意力机制在强噪声干扰的低SNR情况下能带来更为明显的提升。例如,在15 dB水平下的本文模型的诊断正确率为99.87%,而第二高的诊断正确率为原始信号模型的97.79%,正确率提升了2%左右;而在-5 dB水平下本文模型的诊断正确率为87.45%,相较于诊断正确率为80.38%的高斯滤波模型,提升了将近7%的诊断正确率。
4 结论
本文提出一种基于降噪多分支CNN和注意力机制的滚动轴承故障端到端诊断方法,实现了故障信号在原始时域和频域特征的充分提取及权重自适应分配。试验结果表明,本文模型在不同SNR水平下均能实现较传统机器学习模型SVM、BP神经网络以及深层神经网络CNN更高的故障识别精度;尤其是在强噪声干扰的环境下,本文模型表现出更强的抗干扰能力和更高的诊断精度。通过改变输入信号和取消注意力机制的对比试验,进一步验证了提出模型中多分支结构和注意力机制的有效性。本文方法可为滚动轴承在强噪声环境下的故障诊断提供有力工具。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
中华养生保健(2020年7期)2020-11-16 01:14:26
学生天地(2019年28期)2019-08-25 08:50:54
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
数学物理学报(2018年1期)2018-03-26 08:16:36
家教世界·创新阅读(2016年11期)2016-12-27 18:49:15
天津护理(2016年3期)2016-12-01 05:40:01
故事会(2016年15期)2016-08-23 13:48:41
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
山西大同大学学报(自然科学版)(2014年3期)2014-01-23 01:56:30
