
多功能工业机器人实训装置的设计
2023-03-01 06:54甘静
现代工业经济和信息化 2023年1期
甘 静
(广州市机电技师学院,广东 广州 510000)
引言
随着劳动力成本的增加,制造业转型升级的迫切需要,工业机器人在社会上的应用和维护人才需求不断增加,使得企业迫切需要功能齐全、用于工作工业机器人技术学习装置,以满足不同层次人才培养的要求备需求。工业产品设计分成设计产品、环境艺术设计、散播设计方案、工程成本管理4类,工业生产和工作职责分工所提供的工业产品设计,与其他造型艺术、生产制造主题活动、制作工艺等均有显著不一样,它是各种各样课程、技术性和审美观的交叉式物质,工业产品设计的另一半是大批量生产的商品,差别于手工业者阶段散件制做的手工工艺品。
设计好的工业产品要使用展现用的展示设备,目前的展示架没法保证多方位供消费者开展参观考察,且只可以展现单一的商品不能开展随时随地拆换,因而大家急待一种多用途工业产品设计用展现设备。
1 设计要求
实践设备以使用人学习培训工业机械手技术性为首要目地,并兼具与工业机械手工作平台配套设施的PLC、触摸显示屏、感应器和气动式技术性的学习培训。工业机械手典型性基本运用包含安装、堆垛、铝压铸、检验、运动轨迹等,规定以新项目化和智能化的形式设计方案实践项目內容,进而让用户在实训里进行各种各样典型性工业生产机器人行业运用的学习培训。对于此事,将实践设备设计方案为一个开放性的工业机械手实训平台,以满足不一样行业具体生产制造运用转变的要求。
2 控制系统设计
本设计根据下列技术规范给予完成:一种多用途工业产品设计用展现设备,包含行为主体,上述行为主体一外壁的中心固定不动衔接有分挡板,上述分挡板的底边固定不动衔接有第一承重板,上述分挡板的两边与行为主体的两内外壁均设立有滑轨,上述导槽的内部结构滚动联接有旋转设备,上述旋转设备的上表层固定不动衔接有定位装置,上述行为主体的积极与反面固定不动衔接有第一固定不动板,上述第一固定不动板的正脸根据设定联接柱固定不动衔接有第一固定不动块,上述第一固定不动块的一侧边固定不动衔接有门把,第一承重板的上表层固定不动衔接有第一微型吊机。
为了更好地仿真模拟工业机械手运送堆垛的具体工作情况,开发设计了一个送料传送控制模块。该控制模块由输送带、送料组织等构成。在作业环节中,产品工件最先在料斗中由气动式设备推倒输送带上,进行产品的送料传送,随后产品工件再经传送带输送到位后,由智能机器人抓取产品工件送进安装模块。输送带由直流无刷电机推动,配有拉紧组织,便捷调整。
依据具体制造,工业机械手务必具有下列作用,以达到实践的要求:在智能机器人使用期限内,应用智能机器人离线手机软件开展程序流程、I/O和智能机器人3D动态性姿势的监管;远程机器人系统具有备份与还原作用,全自动专用工具净重与负载检验设置作用,给予根据VB的二次开发作用,智能机器人全使用寿命维护保养全自动维护保养监测系统作用,智能机器人轨迹即时微调作用;内置I/O自定可编按键作用;具有3D即时舒服遥杆手动式电脑操作系统;充电电池环境保护、用电量节约;智能机器人系统作用可终生更新(高级客户);适用RAPID计算机语言标准,并可立即表述实行;智能机器人自动控制系统手机软件务必根据WINCE服务平台,便于智能机器人二次开发;机器人自动控制系统原配固体储存器容积不可小于1G,并适用USB拓展为副存储器。
为了更好地仿真模拟工业智能机器人铝压铸机左右料的具体工作情况,大家开发设计了铝压铸机模块控制模块。该模块由铝型材构建支撑架、压铸组织、入料组织、送料组织等构成,其铝制构件选用阳极空气氧化喷砂工艺,钢制构件则选用静电喷涂解决,组织外场安配有钣金件机罩和安全性罩,既好看又安全性。
3 功能设计
下边将融合本文执行例中的图下,对本文执行例中的技术规范开展清晰、详细地叙述。根据本文中的具体实施例,本行业一般专业技术人员在沒有作出创造力工作前提条件下所取得的任何别的执行例。
根据图1至图4,本文出示一种技术规范:一种多用途工业产品设计用展现设备,包含行为主体1,在主体1的一侧边配有显示屏可以为客户开展设备的表明,行为主体1一外壁的中心固定不动衔接有分挡板2,分隔板2的底边固定不动衔接有第一承重板3,分挡板2的两边与行为主体1的两内外壁均设立有滑轨,滑槽的内部结构滚动联接有旋转设备4,旋转设备4的上表层固定不动衔接有定位装置5,行为主体1的积极与反面固定不动衔接有第一固定不动板6,第一固定板6的正脸根据设定联接柱固定不动衔接有第一固定不动块7,第一固定块7的一侧边固定不动衔接有门把8,第一承重板2的上表层固定不动衔接有第一微型吊机9,第一电动伸缩杆9的一端与旋转设备4的下外表固定不动联接,行为主体1上外表的四角处均根据设立凹形槽A安裝有第二微型吊机10,第二固定不动伸缩管10同后盖板11联接,使用人运用滚轮403与第一微型吊机9推动旋转设备4与定位装置5往下使其收纳整理在行为主体1的内部结构,后盖板11也与此同时盖在行为主体1的上边,第二微型吊机10的一端固定不动衔接有后盖板11,盖板11下外表的两边固定不动安裝有照明灯具12,照明灯12为设备给予照明灯具,便捷消费者参观考察,后盖板11上外表的两边根据设立凹形槽B固定不动安裝有防污滤网13,在对行为主体1的内部结构开展自然通风的与此同时,防污滤网13阻拦外头的尘土进到行为主体1的内部结构,行为主体1下外表的四角处根据第二固定不动块14固定衔接有万向球滚轮15,旋转设备4包含置放盒401,放置盒401的积极与反面均根据联接柱固定不动衔接有第三固定不动块402,第三固定块402的内部结构根据驱动轴旋转联接有滚轮403,置放盒401的内底壁根据安裝固定不动座404固定衔接有电动机405,定位装置5包含第二承重板501,第二支撑板501上外表的两边均固定不动衔接有第四固定不动块502,第四固定块502的一侧边根据伸缩式扭簧503固定不动衔接有抵接块504,设定门把8与万向球滚轮15有利于设备挪动。
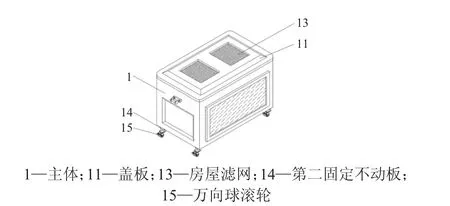
图1 系统设计图

图4 转动装置与固定装置结构示意图
为了更好地仿真模拟工业机械手运动轨迹运用的具体情况,开发设计了运动轨迹仿真模拟模块控制模块。该模块由铝型材、基座、运动轨迹仿真模拟板、画图板、打印纸张和磁瓦等构成。该模块的基座选用Q235A静电喷塑,运动轨迹仿真模拟板选用压铸件阳极氧化处理喷沙,画图板选用茶褐色有机玻璃板,板嵌入磁瓦。

图2 拆分结构示意图

图3 图2中A处放大结构示意图
4 结语
公司设计进行的多用途智能机器人实践设备,为培养适用型工业机械手安裝、调节和维系的自动化技术专业技术人员给予了高效率、安全性实践在线学习平台。生产制造当场所采用的工业机械手均为单一工作平台,而工业机械手人才的培养是混合型技能型人才,规定技术专业技能相对高度综合型,必须熟练掌握的专业技能要包含工业生产设备人不一样行业领域的运用,如:堆垛、运送、左右料、铝压铸、同轴电缆追踪和爬取等,故学习培训设备要能进行多种多样工业生产、应用领域的专业技术培训,以降低客户的设施投进成本费,造就高经济价值。
猜你喜欢
沈阳大学学报(自然科学版)(2021年5期)2021-10-15
电站辅机(2021年4期)2021-03-29
——基于计划行为理论的解释架构
财会月刊(2018年9期)2018-03-28
财政监督(2018年5期)2018-03-09
中国公路(2017年19期)2018-01-23
发明与创新·大科技(2017年1期)2017-01-14
人民论坛(2016年14期)2016-06-21
智能制造(2015年10期)2015-11-04
中国修辞(2015年0期)2015-02-01
沈阳大学学报(自然科学版)(2014年3期)2014-03-25
