基于VMD-RobustICA 与时频分析的永磁同步电机噪声源识别
2023-02-28 16:10:14牟保军郑立辉王岩松
智能计算机与应用 2023年11期
牟保军,郭 辉,袁 涛,孙 裴,郑立辉,王岩松
(上海工程技术大学机械与汽车工程学院,上海 201620)
0 引 言
PMSM 具有功率密度高、效率高、调速范围宽等优势,在电动车中得到广泛应用。 特别是分数槽集中绕组永磁同步电机,具有端部绕组短、齿槽转矩小、易于加工、弱磁调速能力强、容错性好等特点,使其成为更好的选择[1-2]。 随着电动汽车发展,电动汽车已经逐步成为城市交通中重要噪声来源,使得噪声控制和减少噪声污染已成为PMSM 研究的重要方向。 因此,对于PMSM 识别主要噪声源和针对其进行控制成为主要研究热点。
PMSM 的主要噪声源是机械噪声和电磁噪声。电机中机械噪声主要来自转子和轴承的动态不平衡等因素,与其他旋转机械的噪声特性相似,许多文献研究了机械噪声的阶次特征[3]。 电机中产生的电磁力一方面驱动电机旋转,另一方面作用于定子表面产生电磁噪声[4]。 电磁噪声的阶次特性与电机本身的极数和槽数有关,并受一些非理想因素的影响[5]。 Jae-Woo 等学者[6]分析混合动力汽车使用的内置永磁电机的齿槽转矩脉动、电磁转矩脉动、径向电磁力和切向电磁力的特性,并通过弱化36 阶电磁励磁降低了电机噪声2 分贝。 目前,电磁力的研究中,在不同空间阶数的径向电磁力对振动噪声的影响是主要的关注方向[7]。
PMSM 的振动和噪声信号是一个非定时变信号。 传统的信号处理方法只能分析信号的统计平均特性,不能充分揭示信号频率随时间变化的规律。时频分析可以提供时域信号和频域整体或局部变化结果,揭示信号中包含的频率分量的时变特性。Hilbert-Huang 变换(HHT)是分析具有不稳定和非线性特征信号的一种有效方法[8]。 HHT 已应用于旋转机械的故障诊断,如转子、轴承、齿轮等,在许多研究工作中,HHT 常用于提取振动信号[9]。 EMD已经过评估,能够有效检测电机故障[10]。 在旋转机械故障诊断中,利用VMD 提取转子系统故障特征、滚动轴承故障诊断、松动底座故障诊断等性能较好[11-12]。 VMD 还结合不同的方法对旋转机械设备在不同工况下的故障进行诊断。 Zhang 等学者[13]基于VMD 的能量熵和小波包(WPD)分解模式研究了铣削过程中的颤振检测。 卷积盲源分离(BSS) 和VMD 相结合,分析从具有较大驱动速度变化的风力涡轮机收集的轴承裂纹信号[14]。 Bi 等学者[15]通过EEMD 结合RobustICA 方法对汽油机发动机噪声源进行识别,成功分离识别出了排气噪声、燃烧噪声和活塞撞击噪声。 目前,电机的噪声源复杂,致使电磁噪声和机械噪声难以区分。
因此,本文的目的是对永磁同步电机的机械噪声和电磁噪声进行分离识别,以进行诊断、评估和分析。 8 极48 槽PMSM 的噪声测试在半消声室中进行。 然后,将测试结果应用VMD 结合RobustICA 的方法对PMSM 中的电磁噪声和机械噪声进行分离识别。
本论文首先介绍了VMD 和RobustICA 算法的求解原理,并根据其特点进行仿真分析。 然后,经过试验得出该方法在永磁同步电机噪声分析结果。 最后,通过结果分析得出该方法可以有效分出电机的电磁噪声和机械噪声。
1 理论基础分析
1.1 变分模态分解
VMD 方法是Dragomiretskiy 等学者[16]提出一种自适应得出约束变分问题最优解的时频分析方法,可以较好地处理EMD 和EEMD 中出现的模态混叠问题。 约束变分问题可以用方程(1)描述:
其中,{uk}={u1,u2,…,uk} 为模态分量的缩写;{ωk}={ω1,ω2,…,ωk} 为模态分量对应的中心频率;K为变分模态分量的数量;∂t为t的偏导数;δ(t) 为脉冲函数;;ω为圆频率2πf。
为了比较EMD、EEMD 和VMD 的特性,使用频率接近仿真信号进行对比,可用式(2)来表示:
总信号S由4 个子信号组成,如图1 所示。 然后,采用EMD、EEMD 和VMD 三种方法对模拟信号进行分离和识别,结果如图2 所示。

图1 EMD、EEMD 和VMD 仿真信号Fig. 1 EMD、EEMD and VMD simulation signals

图2 EMD、EEMD 和VMD 分解结果Fig. 2 Signal separation results of EMD、EEMD and VMD methods
从图2(a)可以看出,当使用EMD 方法对信号进行分解时,可以通过红圈标记部分看出结果中出现了模态混叠问题。 从图2(b)可以看出,当使用EEMD 方法对信号进行分解时,可以通过红圈标记部分看出原始信号中的S1、S2和S4可以很好地分离,但对于原始信号中的S3,模态混叠问题一定程度上存在。 从图2(c)可以看出,当信号通过VMD方法分解时,可以准确地分离出混合信号S的4 个子信号。 比较3 种方法的分离结果可以得出结论,由于EEMD 仍然存在模态混叠问题,因此VMD 在信号分解方面比EEMD 更有优势。
1.2 独立分量分析
在处理盲源分离问题时,独立分量分析(ICA)被广泛使用。通过对混合矩阵A进行估计和混合信号S(t),可以计算出源信号相似的独立分量。 ICA的工作原理如图3 所示。

图3 ICA 的原理图Fig. 3 The principle diagram of ICA
FastICA 是基于负熵目标函数并应用牛顿迭代法原理进行优化处理的一种并行分布算法[17]。 算法的优势在于收敛速度高,但是遇到弱相关性的源信号会出现分解不充分或者失效问题。 因此,Zarzoso 等学者[18]提出一种具有更好鲁棒性的RobustICA 方法,该算法是一种基于峭度和最优步长的盲源分离算法。 为了能够体现其性能,应用了一组仿真信号进行对比分析,如图4 所示。 仿真信号由4 个信号组成:正弦信号、曲线信号、锯齿信号和方波信号。 这组原始模拟信号通过随机混合矩阵进行线性混合,形成一个由4 个信号组成的信号。然后,将其作为FastICA 和RobustICA 的信号输入,结果如图5 所示。 从结果可发现,FastICA 结果中部分信号不能够较好地还原其信号特征,见图5 中红圈部分,而RobustICA 方法分离出来的结果可以较好地体现原始信号特征。

图4 源信号Fig. 4 The original signal

图5 FastICA 和RobustICA 分离结果Fig. 5 The calculation results of FastICA and RobustICA
2 PMSM 噪声试验布置
PMSM 噪声测试在半消声实验室中进行的,背景声压级低于10 dBA。 测试配置如下:
(1)设备:西门子40 通道LMS-SCM05、PCB 专业麦克风、CAL200 麦克风校准器和三向加速度传感器。
(2)采样频率:25 600 Hz。
(3)试验工况:12 000 r/min 空载工况。
实验中采用采用了LMS TestLab 软件进行数据采集,PMSM 参数见表1。 测点采用1/4 半球面布置,如图6 所示。

表1 PMSM 基本参数Tab. 1 Table of parameters

图6 PMSM 实验测试系统Fig. 6 PMSM experimental system
3 PMSM 声源识别
针对采集到的信号,为了提高分析效率,本文对实测PMSM 噪声信号进行了重采样。 重采样频率为12 800 Hz。 图7 显示了从PMSM 顶部收集的噪声信号的时域和频域信息。

图7 噪声信号时域和频谱图Fig. 7 Noise signals in the time domain and frequency domain
根据得到的信号,采用VMD 进行分解得到变分模态分量,应用变分模态分量与原始信号之间相关系数进行分量的取舍。 将结果作为RobustICA 的输入,得到剩余的变分模态分量中的独立噪声源。通过FFT 和CWT 分析结果的时频特性,对PMSM的噪声源进行识别。
将重采样信号进行VMD 分解,信号分解为一系列分量,见表2。 当分解层数K选择为11 时,后2个中心频率10 844 Hz 和11 730 Hz 之间的小于1 000 Hz,可以认为信号存在过度分解。 因此,选取的最优分解层数K值为10。 根据分解结果与原始信号的相关系数,提取了8 个变分模态分量的主要成分,见表3。 然后,使用RobustICA 从包含原始信号大部分特征的变分模态分量u1~u8中提取独立的噪声源,结果如图8 所示。

表2 模态层数及其中心频率Tab. 2 The modal number and their center frequencies

表3 ICs 和源信号相关系数Tab. 3 The correlation coefficients between ICs and the measured signal
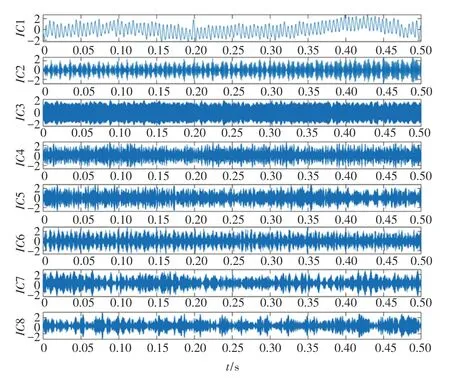
图8 噪声信号的VMD-RobustICA 分离结果Fig. 8 Separated results of VMD-RobustICA for noise signals
从图8 可以清楚地看出,混合信号应用RobustICA 提取了8 个独立分量,分离过程中的每个独立分量都可能是PMSM 对应的主要噪声源。
图8 中,IC2 的时频分析结果如图9 所示。 由图9 可知,IC2 的峰值频率主要集中在848 Hz附近,对应转频的1~3 倍左右,而且出现持续间断特点。 根据电机噪声机理分析可知,该原因是电机转子不平衡而产生的机械噪声,并且其频率特点主要为转频1~3 倍,特征频率表达式为:
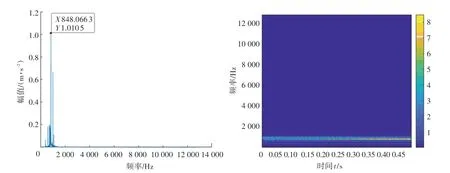
图9 IC2 时频分析结果Fig. 9 Time-frequency analysis results of IC2
IC3、IC5 和IC6 的时频分析结果如图10 所示。由图10 可知,IC6 的频率成分主要集中在1 600 Hz,IC5 的频率成分主要集中在4 800 Hz,IC3 的频率成分主要集中在9 602 Hz,且出现持续间断现象。 根据实验工况可知转速基频在200 Hz 附近,由PMSM 中电磁噪声机理可知,在理想条件下径向电磁力波的频率特征为电机槽、极数的整数倍,电磁噪声特征频率表达式为:

图10 IC3、IC5 和IC6 的时频分析结果Fig. 10 Time-frequency analysis results of IC3,IC5 and IC6
其中,i为谐波次数;Q为齿槽数;n为转速。
根据式(4)可知,IC6、IC5 和IC3 分别对应与电机8 倍频、24 倍频和48 倍频,对应电机极对数的整数倍,可以判断分量来源是永磁体磁密和电流基波磁密作用产生的电磁噪声。
4 结束语
本文基于VMD-RobustICA 结合时频分析方法来分离和识别PMSM 中的主要噪声源。 通过VMD将信号分解为一组变分模态分量,可以有效解决分解过程中的模态混叠问题。 RobuseICA 可准确提取噪声源,与VMD 相结合,VMD 将原始信号分解为10 个子信号,经过相关分析滤波后,再进行RobustICA 分析,得到可能的噪声源信号以获得主要噪声源,并且可以更有效地分离信号中的独立分量,结合时频分析的结果可以判断独立分量对应的的噪声源。 因此,VMD-RobustICA 结合时频分析的组合方法是PMSM 电磁噪声和机械噪声分离识别的有效工具。
猜你喜欢
汽车工程(2021年12期)2021-03-08 02:34:18
数学杂志(2020年3期)2020-07-25 01:39:30
数学物理学报(2019年6期)2020-01-13 06:08:18
数学物理学报(2017年6期)2018-01-22 02:26:49
数学物理学报(2016年3期)2016-12-01 05:36:30
雷达与对抗(2015年3期)2015-12-09 02:38:55
舰船科学技术(2015年8期)2015-02-27 15:38:48
电测与仪表(2014年17期)2014-04-04 11:56:48
振动工程学报(2014年4期)2014-03-01 01:15:31
振动、测试与诊断(2014年6期)2014-03-01 01:14:47