医用下肢外骨骼机器人发展现状及风险研究
2023-02-28 12:52吴少帅
中国食品药品监管 2023年12期
吴少帅
河北省药品医疗器械检验研究院
河北工业大学
李挥
河北省药品医疗器械检验研究院
杜胜利
河北省药品医疗器械检验研究院
王月英*
河北省药品医疗器械检验研究院
随着科技的快速发展,医疗水平也在迅速提高,人们的健康得到了更好的保障,平均寿命也明显延长。同时,伴随着出生率的降低,世界人口老龄化现象越来越明显。老年群体基数的增多带来的肢体残疾、卒中后遗症、脊柱损伤等各种运动障碍患者数量也在不断攀升,康复医疗服务需求不断增多,安全、高效、成本低廉的康复治疗方案和设备也在不断更新迭代。其中,医用下肢外骨骼机器人(medical lower limb exoskeleton robot)在下肢康复训练中应用越来越广,也是近年来康复领域的研究热点[1]。
外骨骼机器人(exoskeleton robot)实质上是一种穿戴在人体外部的机械结构,在为穿戴者提供如保护、助力、身体支撑等功能的基础上,能对人体进行辅助或者主动助力来满足人体的各种运动需求。医用下肢外骨骼机器人正是利用这些功能,为下肢残疾或运动功能受损的患者提供相应康复训练,进而达到改善病症甚至康复的目的。根据目标康复部位的不同,医用外骨骼机器人可分为医用下肢外骨骼机器人、医用上肢外骨骼机器人、医用髋关节外骨骼机器人等;根据动力源的不同,可分为有源外骨骼机器人和无源外骨骼机器人;根据结构组成不同,大致可分为刚性外骨骼机器人和柔性外骨骼机器人。医用下肢外骨骼机器人的功能是代替、补偿或增强人类下肢的运动能力,辅助各类穿戴者完成行走任务,辅助下肢功能障碍患者完成康复训练活动[2]。
1 国内外研究现状
1.1 国外研究现状
在下肢外骨骼机器人的研究上,国外起步较早,已进行较长时间的研究,取得了不少成果。下肢外骨骼机器人的驱动方式、结构、交互方式等有着许多不同的设计方案,部分代表性的下肢外骨骼机器人如图1 所示。
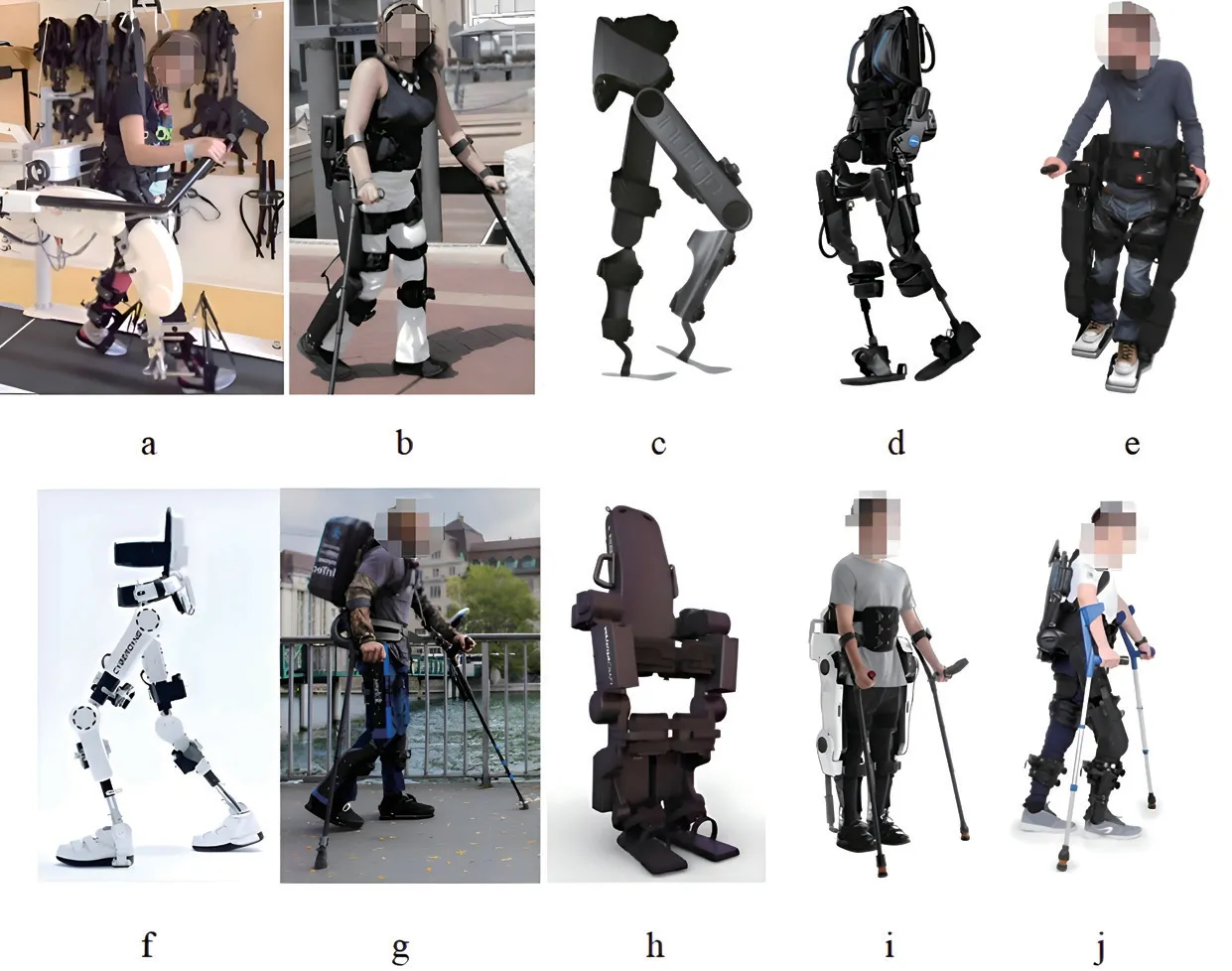
图1 国外下肢外骨骼机器人产品
瑞士Hocoma 公司和苏黎世Balgrist 医学院康复中心共同研发的Lokomat 下肢外骨骼机器人(图1a),能够实现在跑步台上实施减重步态康复训练,在许多国家医疗机构中得到广泛应用。以色列ReWalk 公司生产的ReWalk 下肢外骨骼机器人(图1b),先后获得了欧盟CE认证和美国食品药品监督管理局(FDA)认证,首次以医疗器械的方式被产品化,适用于包括手臂在内的上半身运动功能健全的患者。美国Parker Hannifin 公司研发的Indego 下肢外骨骼机器人(图1c),采用了模块化设计的思路,下肢外骨骼机器人的各部件可拆分为小的模块,便于携带。Indego 下肢外骨骼机器人可结合功能性电刺激来改善肌肉力量。美国Ekso Bionics 公司研发的Ekso 下肢外骨骼机器人(图1d),可为截瘫患者提供辅助起坐和平地步行训练的功能[3]。新西兰Rex Bionics 公司生产的REX下肢外骨骼机器人(图1e),是专门为下肢瘫痪的患者设计的,用户可通过操纵杆完成前后向和侧向的移动、旋转、上下楼梯及其他运动练习。该外骨骼机器人每条腿的髋和膝部各有2 个主动自由度;踝部有一个,鞋底非常宽大,它可在不借助拐杖、助行器等平衡工具的情况下通过缓慢静态步态实现自主平衡运动,即在步行过程中可主动保持平衡,显著提高了系统安全性[4]。
日本Cyberdyne 公司研发的HAL 下肢外骨骼机器人(图1f),可应用到截瘫、偏瘫患者的步态训练上。HAL 下肢外骨骼机器人采用内置步态与肌电信号相结合的方式,可基于肌电信号调整出更适合患者的运动模式。来自美国佛罗里达州的研究团队研究出了Mina 下肢外骨骼机器人(图1g),其尺寸针对特定穿戴者的体型设计,采用滚珠丝杠作为传动装置。法国Wandercraft 公司生产的Atalante 下肢外骨骼机器人(图1h),是一款自主平衡的下肢外骨骼机器人。Atalante下肢外骨骼机器人在髋关节和踝关节增加了主动控制自由度,其中髋关节拥有完整的3 个主动控制自由度,可提供起立、坐下、平地步行、上下楼梯和上下坡等运动模式[3]。韩国Angel Robotics 公司与韩国西江大学合作研发的WalkOn 下肢外骨骼机器人(图1i),在设计上增加了一个弹簧阻尼结构来辅助减震,有效缓解了康复运动中的地面冲击力影响,提升了患者舒适度。WalkOn 下肢外骨骼机器人提供了多种地形下的辅助步行功能。俄罗斯ExoAtlet 公司研发的ExoAtlet 下肢外骨骼机器人(图1j),可为瘫痪患者提供步行训练功能。ExoAtlet 下肢外骨骼机器人采用了高背包结构设计,并且提供了固定肩带来帮助患者维持躯干姿势。此外,ExoAtlet 外骨骼机器人还配备了康复数据云平台,可实时传输数据到云服务器,对患者训练过程进行在线监测和分析。
1.2 国内研究现状
国内对于下肢外骨骼机器人的研究起步较晚,同时也参考了国外的同类产品研究路线,在结构设计以及功能上进行了一定程度的创新改进,代表性的成果如图2 所示。

图2 国内下肢外骨骼机器人产品
香港中文大学研发的CUHK-EXO 下肢外骨骼机器人(图2a),设计有7 个自由度,能够为截瘫患者提供辅助起立和平地步行的功能。CUHKEXO 下肢外骨骼机器人的躯干、腿部及配套的安全辅助拐杖上都装有姿态传感器,在脚底安装有压力传感器,可以基于全身的姿态信息和脚底压力信息判断人机系统的运动状态。北京大艾机器人科技有限公司研制的AiWalker下肢外骨骼机器人(图2b),用于帮助下肢截瘫患者康复训练。AiWalker 下肢外骨骼机器人采用了钛合金材料,适合体重不超过100kg 的患者使用,提供辅助起坐以及平地步行的功能,并通过支架保护穿戴者安全[5]。哈尔滨工业大学的轻薄化设计,完成了下肢外骨骼机器人质量小于10.15kg,局部最大厚度为40mm(图2c)。该下肢外骨骼机器人采用了基于正余弦函数的参数化步态轨迹控制算法,通过参数调整可以在线识别、控制膝关节角度。台湾福宝科技股份有限公司研发的Free Walk 下肢外骨骼机器人(图2d),可帮助患者完成站立、行走和坐下等功能,进一步实现康复训练目标,并设计有多种不同安全防护措施。
深圳迈步机器人科技有限公司生产的Bear-H1 型下肢外骨骼机器人(图2e),采用自主研发的柔性驱动器,可实现关节力矩反馈和关节力矩控制,支持主动训练、被动训练和助力训练模式。杭州程天科技发展有限公司研发的UGO 下肢外骨骼机器人(图2f),可为截瘫和偏瘫患者提供步行辅助和步态训练功能。UGO 下肢外骨骼机器人提出一种用于自平衡和防跌倒的机电装置,并通过控制力矩陀螺产生反转力矩,以控制机器人的平衡,提升使用安全性。此外,UGO 下肢外骨骼机器人还支持训练数据上传云端,方便训练数据的统计与分析,进而了解患者康复进度以及便于制定下一阶段康复方案。中国科学技术大学研发的针对偏瘫患者的康复外骨骼机器人(图2g),可结合表面肌电(sEMG)信号估计人体下肢关节的刚度,并构建基于偏瘫患者健侧肢体刚度参数的自适应协同控制策略。上海傅利叶智能科技有限公司生产的Fourier X2 下肢外骨骼机器人(图2h),主要为截瘫患者提供辅助起坐、平地行走以及上下楼梯的功能[6]。
综上所述,虽然国外下肢外骨骼机器人技术发展较早,但我国相关科研院所和企业在国外已有的研究经验基础上,也研发出了诸多产品,不少产品具有一定的创新性;对下肢外骨骼机器人的风险识别和防护也做了很多研究工作。
2 风险研究
安全性和有效性是医疗器械研发上市最重要的两个指标考量方向。医疗器械的安全性是一个相对性的描述,并不是通过试验取得注册证的医疗器械产品就是绝对安全的,任何医疗器械在整个生命周期内的使用都是伴随着风险的。安全性的定义是基于风险的可接受性的,美国FDA 在法规中描述:在预期用途和使用条件下,且具备充分的指导和对不安全使用的警示情况下,使用该器械对健康带来的可能收益超过可能风险,则器械的安全性得到了合理保证。因此,当预期风险超过收益时,即认为是不可接受风险,也就是医疗器械的安全性是不可靠的[7]。
我国国家标准GB 9706.1—2020《医用电气设备 第1 部分:基本安全和基本性能的通用要求》[8]中提出: 基本安全是指当医用电气设备在正常状态和单一故障状态下使用时,不产生由于物理危险(源)而直接导致的不可接受的风险。GB 9706.1—2020 于2023年5月正式实施,新版标准更加突出了医疗器械相关责任人对产品风险的识别、评价、预防等方面的要求。这也要求医疗器械相关责任人在产品研发过程中,对产品的风险要充分研究,才能保证产品的安全性,也才能更顺利地完成注册上市。
国内外均有一些医用下肢外骨骼机器人已完成注册上市,但目前国内外关于医用下肢外骨骼机器人的专用标准还不甚完善,绝大部分产品的研发主要依据通用的国家行业标准,如电气安全、电磁兼容性、医用康复器械等国家行业标准,因此,不同研发企业对产品的风险认识水平也有所不同。伴随着技术的进步、标准体系的日臻完善,相关的研发、检验、审评、审批人员对医用下肢外骨骼机器人的风险认知也会不断提升。本文从以下几方面举例介绍医用下肢外骨骼机器人研发过程中考量的风险点。
2.1 电气安全风险
医用电气设备应符合GB 9706.1—2020《医用电气设备 第1 部分:基本安全和基本性能的通用要求》,医用下肢外骨骼机器人同样需要符合通用标准的要求。
2.1.1 电介质强度
电介质强度是电气安全评价中非常重要的一个指标,也是医用下肢外骨骼机器人设计中需要考虑的一个重要风险点。医用电气产品在使用过程中,与其连接的电网因雷电、开关过度或感应等情况而带来瞬态过电压,会造成绝缘材料的损伤甚至击穿。电介质强度测试是检验医用电气设备固态电气绝缘性能的重要方法,它是通过对设备施加一个高于其额定值的电压并维持一定时间来判定设备的绝缘材料和空间距离是否符合要求,即利用高电压的手段来检验电气绝缘结构中是否存在薄弱环节和缺陷。虽然绝大部分医用下肢外骨骼机器人是内部电池供电运行的设备,但是在其充电过程中还是需要与电网相连接。因此,该类产品的绝缘设计应考虑网电源可能产生的瞬态高压风险,即适配器部分的初级电路应按照预期连接的网电源电压设计绝缘结构。
2.1.2 超温防护
无论是柔性驱动还是刚性驱动,大部分医用下肢外骨骼机器人的驱动设备是电动机,而电动机运行过程中会产品热量。作为可穿戴设备,为了保证更好的康复训练效果以及患者安全,通常的医用下肢外骨骼机器人是通过绑带紧紧将患者与设备固定在一起的。因此,研发人员在研发过程中应保证所有与患者接触的部分,尤其是电机附近结构的工作温度能满足标准规定,可以通过增加与患者隔离、改进电机技术、散热技术等来降低超温灼伤患者的风险。
2.1.3 控制系统可靠性
医用下肢外骨骼机器人功能通常不是单一的,从训练模式来看,一般会包括主动模式、被动模式、助力模式,甚至一些厂家会针对不同病症造成的运动障碍情况制定训练模式,如偏瘫模式、帕金森模式等。因此,为了保证康复训练的安全顺利开展,软件控制系统应是可靠的,即使出现程序故障,也不应导致医用下肢外骨骼机器人出现引起不可接受风险的错误操作,如产生过大的扭矩对患者造成二次损伤,又或者程序异常停止后,外骨骼部分不能复位,导致患者跌倒等情况的发生。
2.2 电磁安全风险
包括医用下肢外骨骼机器人在内的有源医疗器械在注册过程中,都需要通过电磁兼容性试验。GB/T 4365—2003《电工术语电磁兼容》给出了电磁兼容性的定义:设备或系统在其电磁环境中能正常工作且不对该环境中任何事物构成不能承受的电磁骚扰的能力[9]。即医用电气设备应具备一定抗电磁干扰能力和不超过规定限值的电磁发射水平。医用下肢外骨骼机器人应符合YY 9706.102—2021《医用电气设备 第1-2 部分:基本安全和基本性能的通用要求 并列标准:电磁兼容 要求和试验》[10]标准规定。该标准对医用电气设备的发射试验和抗扰度试验作了明确规定。
2.2.1 静电抗扰度
静电是两种不同物质摩擦时,正负极性的电荷积累在两个不同物体上形成的。静电源与其他物体接触时,电荷高速移动,就发生了静电放电现象。静电放电电压通常能达到数千伏特甚至上万伏特,很多电子元器件是静电敏感的,很容易被静电损坏。
对于医用下肢外骨骼机器人静电放电所带来的风险可能有:①损坏元器件导致设备损坏;②引起电路信号错误,使设备产生错误动作,进而给患者带来风险。医用下肢外骨骼机器人与患者或者操作者接触的部分较多,可接触的金属部分,是静电放电的主要区域,研发人员应做好内部电路与这一类金属外壳的静电防护,以防止静电放电造成的设备损坏或误操作的发生。
2.2.2 浪涌(冲击)抗扰度
浪涌(冲击)抗扰度是指医用电气设备受到由开关装置动作或者雷电瞬变引起的单极性浪涌(冲击)信号的干扰,而能保持正常工作的能力。浪涌干扰信号电压可高达2000V,上升时间快,持续时间较短,通过供电网传输至医用电器设备。浪涌冲击可能会造成医用电气设备的故障、数据丢失甚至严重损坏等结果。医用下肢外骨骼机器人在进行康复训练时,大部分产品通常是内部电池供电运行,因此在康复训练过程中并不需要考虑浪涌冲击的风险。但在充电过程中,仍要考虑这一风险,若适配器、充电电路甚至内部次级工作电路不能做好浪涌冲击信号的隔离,很可能会在充电过程中导致设备的故障或损坏。更严重的,在医用下肢外骨骼机器人功能异常的情况下给患者穿戴并进行康复训练,对患者产生伤害的风险将大大提高。
2.3 机械安全风险
医用下肢外骨骼机器人是通过穿戴在患者身上,带动或助力患者完成运动康复训练的。在此过程中,机械安全的风险是显而易见的。
2.3.1 防倾倒
医用下肢外骨骼机器人一般由控制电路、电池包、外骨骼组件、绑带、控制器及电源适配器等部件组成。在医用下肢外骨骼机器人注册单元中,通常厂家还会配备辅助康复训练用的支架、拐杖等配套设备,其主要功能是为患者康复训练提供稳定性支撑,防止患者在康复训练过程中摔倒造成二次损伤甚至患者死亡。也有部分产品在完成康复训练时不需要辅助平衡设备,如REX 下肢外骨骼机器人,以增大本身设备的自重为代价,实现了自平衡能力,即不需要辅助支撑设备即可让患者完成康复训练。总之,医用下肢外骨骼机器人在训练中除保证系统功能稳定性外,还需围绕系统平衡能力,研究人机系统的防倾倒保护机制,以提升使用过程的安全性。
2.3.2 关节运动限位
下肢外骨骼设备运动是利用仿生学原理,机械结构的运动模式或者运动轨迹应符合人类下肢运动的特点。医用下肢外骨骼机器人应充分考虑患者在康复训练过程中下肢各个关节活动的角度范围,并通过物理结构或者软件程序控制增加限位功能。根据患者情况的不同,可设置不同的限位选择,如卒中后遗症患者和偏瘫患者的适用情况就有明显不同。物理限位措施相比于软件程序控制的限位措施具有更不易失效的特点,建议在关节运动预期的最大角度位置提供物理限位措施,提升在康复运动过程中对患者肢体安全的保障。
2.4 其他风险
医用下肢外骨骼机器人的风险控制应覆盖该产品的整个生命周期,除了以上风险外,还有其他方面的风险也应考虑。
2.4.1 不同组件生命周期
如果医用下肢外骨骼机器人的部件生命周期与整个产品的生命周期不同,如部分组件是易损耗件或可更换的,则应提供明确的说明与提醒,避免使用者或患者使用超过部件使用期限的医用下肢外骨骼机器人设备。
2.4.2 生物学风险
医用下肢外骨骼机器人在使用过程中要与患者紧密贴合,不可避免地要与患者接触,因此在选择设备使用材料时也应充分考虑生物学风险。
2.4.3 运输、贮存与安装
医用下肢外骨骼机器人在运输、贮存或安装过程中存在的风险也应被考虑到,如运输过程中的稳定性,产品的防碰撞、振动的能力;长期贮存过程中,电池的电能储存能力是否会衰减;安装是否牢固可靠,如有必要可增加仅允许经过专业培训的人员进行拆装等条款。
3 总结
新版GB 9706 系列标准实施以来,标准体系对医疗器械研发单位的医疗器械风险管理要求明显提高。虽然我国医用下肢外骨骼机器人的研究开始时间晚于国外,但通过近几年的发展,我国产品与国外产品的差距已明显缩小,甚至在个别方面有着赶超的趋势。
本文对医用下肢外骨骼机器人的国内外发展现状进行了调研,在此基础上,结合现有标准体系,从研发设计过程中风险控制角度进行了分析,从电气安全、电磁安全、机械安全等方面举例介绍了部分应考量的风险点。随着产业的发展,相关从业者的风险防控意识和能力都会快速提升,当然也会有新的风险点被发现。风险管理是系统性、全面性的,本文内容并不能全面覆盖医用下肢外骨骼机器人产品的风险点,希望通过本文,对该类产品的研发工作者提供些许帮助。
猜你喜欢
小哥白尼(野生动物)(2021年12期)2021-03-29
装备制造技术(2020年11期)2021-01-26
中学生数理化·高一版(2020年6期)2020-12-17
中学生数理化(高中版.高二数学)(2020年6期)2020-12-04
高师理科学刊(2020年2期)2020-11-26
中华养生保健(2020年2期)2020-11-16
消费导刊(2018年10期)2018-08-20
小天使·六年级语数英综合(2017年3期)2017-04-25
制造业自动化(2017年2期)2017-03-20
发明与创新(2015年25期)2015-02-27