柔性直流输电系统的构网型控制关键技术与挑战
2023-02-27 07:38马秀达汪楠楠
电力系统自动化 2023年3期
马秀达,卢 宇,田 杰,汪楠楠
(南京南瑞继保电气有限公司,江苏省南京市 211102)
0 引言
随着“碳达峰·碳中和”目标的提出以及低碳能源战略的实施,中国将加快构建以新能源为主体的新型电力系统,非同步电力电子设备大量并网,新能源跨区传输规模逐步提升,“双高”电力系统将面临弱系统接入、惯量低以及电压支撑弱等系统问题[1-2]。
柔性直流输电(以下简称“柔直”)是采用全控型电力电子器件的电压源换流器型高压直流输电(voltage source converter based high voltage direct current,VSC-HVDC),相比于常规直流,柔直能够灵活调控有功和无功,可灵活接入有源和无源系统,为大规模新能源送出和区域电网互联提供了新的解决方案[3]。传统的柔直联网控制采用基于锁相环(phase locked loop,PLL)的矢量控制,通过采样并网电压相位进行坐标变换,控制输出电流实现有功和无功控制,表现为电流源特性,控制框架可归类为跟网型(grid following,GFW)控制。随着电网中同步机比例逐渐下降,电网强度降低,当系统出现极弱工况时,PLL 难以准确跟随电网电压,容易出现小干扰失稳问题[4-5]。
为解决新能源领域的弱系统接入以及系统支撑问题,国内外相关学者提出了变流器构网型(grid forming,GFM)控制概念,并对控制策略、稳定分析以及多机并联等问题开展了广泛研究[6-9]。构网型控制的具体实现策略虽有不同,但本质基本一致,英国并网技术规范对构网型控制定义为:1)表现为电压源特性;2)可实现电网频率和电压支撑;3)能够维持弱系统稳定运行;4)具有故障时快速电流注入能力[10]。构网型控制需求已写入欧洲相关国家技术规范或标准[10-13],并在微电网、风电和储能中得到工程应用。2020 年投运的英国69 MW Dersalloch风电场采用构网型控制,可实现孤岛运行以及频率和电压调节[14];2017 年投运 的澳大利亚150 MW/193.5 MW·h Hornsdale 储能是当时世界上最大容量储能系统,基于构网型控制为南澳大利亚电网稳定运行发挥了重要作用[15];中国2016 年在张北风光储工程应用了虚拟同步机控制技术,支撑了系统的惯量和调频需求[16]。
构网型控制在柔直领域的研究主要集中在控制策略和稳定分析方面。其中,文献[17]实现了模拟同步机的柔直控制,可实现惯量和频率调节,同时对各个控制参数影响特性进行了分析;文献[18]从稳态、小干扰稳定及暂态稳定3 个角度分析了采用功率同步控制的柔直与交流系统交换功率的影响因素,并对强弱系统下控制适应性进行了稳定分析,得到了强系统下不适于采用功率同步控制的结论;文献[19]针对海上风电送出场景,对采用构网型控制的多端柔直控制策略和短路特性进行了分析。在工程应用方面,德国规划建设的海上风电柔直工程BorWin6 以及陆上柔直工程SuedLink DC4 的招标文件中已明确提出了对构网技术的需求;纳米比亚和赞比亚互联的Caprivi 柔直工程采用构网型控制,以满足弱系统接入和惯量支撑能力[20-21];中国于2022 年4 月在渝鄂工程(南通道)首次实现构网型控制主网架应用,以解决局部电网检修期间发生N-2 故障时的弱系统稳定运行问题。
柔直构网型控制在理论研究和实际工程应用中依然面临着并网性能评价、宽频稳定性和暂态故障穿越等技术难点,同时,一次设备过流能力和能量来源也是限制其能力的制约因素。因此,充分发挥构网型控制技术优势、灵活应对各类技术问题,是推动柔直在新型电力系统发展的关键。本文对构网型控制的应用场景和技术框架进行了介绍,分析了构网型控制应用于柔直领域的关键技术与问题,探讨了若干技术方向。
1 技术需求
随着新能源基地的大规模开发,新能源接入电网虽然会配备一定比例的同步机组,但依然面临以下挑战:
1)运行于弱系统概率增大。系统强弱一般由短路比(short circuit ratio,SCR)来定量分析,新能源大规模接入地区一般处于电网末端,电网较薄弱,当发生电网检修、故障或同步机停机时,系统短路容量将降低。通常认为,当柔直接入电网的短路比低于2.0或常规直流接入电网短路比低于3.0 时,即定义为弱系统,系统存在运行不稳定的风险[22]。渝鄂工程北通道在出现N-2 或检修N-1 工况时,最低短路比低于1.0,柔直无法稳定运行,其通过稳控装置进行弱系统判别并闭锁柔直[23]。
2)电网缺少惯量。惯量表示频率瞬变时的有功支撑能力,若电力电子装置渗透率过高,系统发生频率变化时,各装置会因保护设备安全退出恶化电网频率特性。2019 年8 月5 日的英国大停电事故因电网惯量不足引起,事发时风机渗透率达34.71%,电网因发电机组跳闸导致频率下降后,风机脱网进一步恶化电网特性,使频率下降至48.9 Hz,最终导致部分负荷切除[24]。
3)缺少电压支撑。电压稳定表示系统受到扰动后,系统电压能保持或恢复到容许的范围内,不发生电压崩溃的能力。对于受端电网,主要是由于多直流馈入替代传统同步机源导致的“空心化”问题,使得电压跌落后恢复能力降低,易造成功角失稳问题[25];对于送端电网,主要是由于跨区送出通道中断后导致较高的系统暂态过电压,新能源无功的不可控输出会进一步推高机端电压,甚至出现机组过电压脱网[26]。
上述问题将极大影响新能源接入,相关研究或工程应用中给出的解决方案总体可分为以下三大类,如图1 所示。

图1 大规模新能源接入解决方案Fig.1 Solutions for large-scale integration of renewable energy
1)增加电网调节设备。增加调相机、无功补偿或储能等设备,以替代原有同步电机部分功能。如调相机可提高系统短路容量、实现无功支撑,以解决电网电压支撑问题,在特高压直流输电系统接入的交流电网得到了广泛应用[27]。该方案主要通过增加额外设备满足电网需求,投资较大。
2)发挥新能源支撑电网能力。作为能源并网接口,并网变流器可通过灵活控制塑造电网特性,如采用虚拟同步机控制、下垂控制和无功补偿等[28]。为发挥暂态扰动期间的有功支撑能力,新能源并网稳态运行点需低于额定功率或配备相关储能设施,经济性差。同时,多并网单元协调难度大,参数设置不合理将恶化电网运行特性。
3)柔直换流器实现电网支撑。柔直一端采用直流电压控制提供能量支撑,另一端采用构网型控制接入电网,模拟四象限运行同步机,提供有功功率和无功功率支撑,保证系统稳定运行。
对于大容量跨区传输换流站,采用基于构网型控制的柔直技术,适应于强、弱和无源系统多场景,在实现功率传输的同时,基于电压源控制特性,发挥惯量/电压支撑。
2 技术框架
学术界对于实现构网型控制的具体策略尚无统一定论,相关研究中将构网型控制总体分为基于PLL 控 制 和 无PLL 控 制 两 大 类[29-30]。其 中,基 于PLL 的构网型控制通过增加有功和无功控制参考值附加量来模拟惯量和阻尼环节,表现为“受控电流源”特性,在强电网下稳态性能稳定,但在弱系统下容易引起小干扰失稳/振荡[31]。本文只讨论无PLL的构网型控制策略,其在强弱电网下运行更为灵活,且具备孤岛运行能力。
构网柔直换流器对外特性可等效为电压源,如图2(a)所示。图中:θ为电压源相位,基于不同的同步方式自产;Eref为电压源内电势幅值,通过无功/电压控制决定;Zv为构网柔直换流器等效阻抗,该参数可通过控制器的虚拟阻抗环节设置;Zg为电网等效电阻;Usabc和Isabc分别为输出电压和电流;Us,d和Us,q分别为输出电压在dq坐标系下的d轴和q轴电压;Is,d和Is,q分别为输出电流在dq坐标系下的d轴和q轴电流;Is,d,ref和Is,q,ref分别为Is,d和Is,q的参考值;Uc,d,ref和Uc,q,ref分别为在dq坐标系下d轴和q轴控制电压的参考值;Uref为电压参考值;Usrms为并网母线电压有效值;Qref为无功功率参考值;Qs为无功功率;kQ为电压/无功下垂控制系数;E0为空载电动势。构网型控制的整体控制结构如图2(b)所示,基于输入的电压源相位和内电势幅值,经交流电压控制和内环电流控制环节得到最终参考波。其中,电压源相位和内电势幅值获取方式分别如图2(c)和图2(d)所示。根据相位自产的不同同步方式,构网型控制可分为以下3 类。
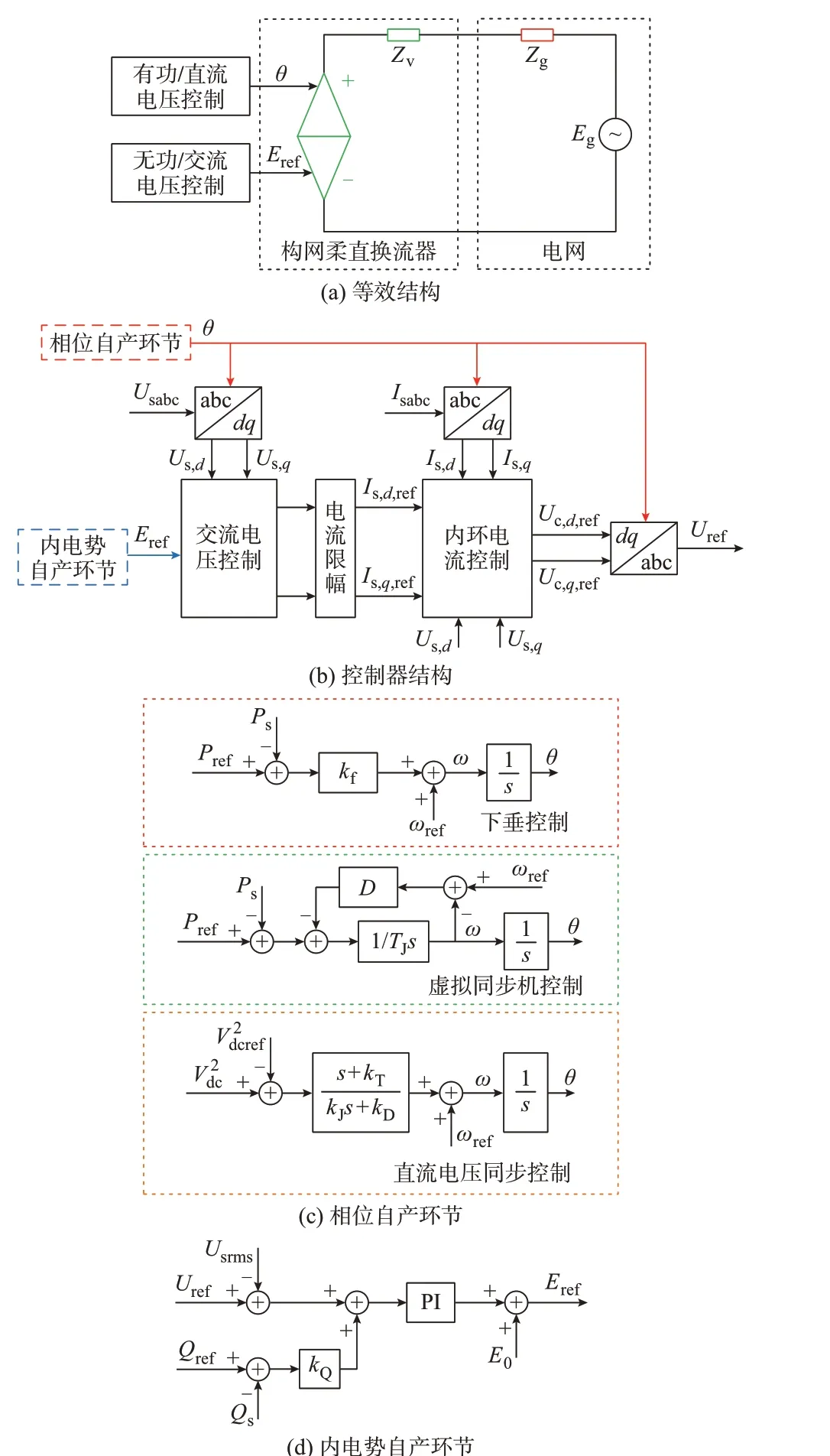
图2 构网型控制技术框架Fig.2 Technology framework of grid-forming control
1)下垂控制[32]。下垂控制是最简单的构网型控制策略之一,其相位自产方式基于有功功率-频率下垂特性。该策略具备调频能力,但不具备惯量支撑能力。同时,该策略响应速度快,易引起系统频率振荡,其可应用于有调频需求或存在多换流单元并联的电网场景。下垂控制数学模型如式(1)所示。
式中:ωref和Pref分别为频率和有功参考值;ω为控制虚拟转速;Ps为输出电磁功率;kf为有功功率-频率下垂系数。
2)虚拟同步机控制[33-34]。虚拟同步机控制相位自产方式基于发电机机电暂态方程。该策略模拟发电机的运行特性,可为系统提供惯量和阻尼环节,适用于弱电网接入和大规模新能源接入等应用场景。但在引入惯量环节的同时,也会引入传统同步电机的低频振荡问题。虚拟同步机控制数学模型如式(2)所示。
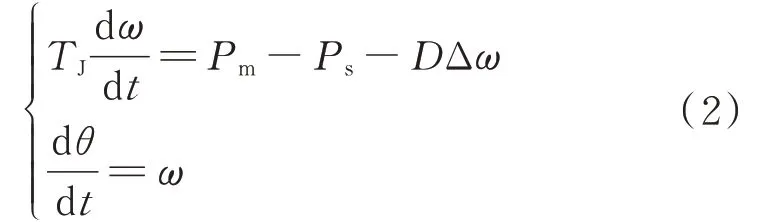
式中:Pm为发电机机械功率,控制中Pref与其等效;TJ为惯性时间常数;D为阻尼系数;ω为发电机转速,控制中表示虚拟转速。
3)直流电压同步控制[35]。与下垂控制和功率同步控制不同,直流电压同步控制基于直流电压实现构网,因此其主要应用于定直流电压控制的换流站(如受端换流站)。该控制策略可实现与功率同步控制相同的特性,但其控制参数匹配难度大。直流电压同步控制数学模型如式(3)所示。
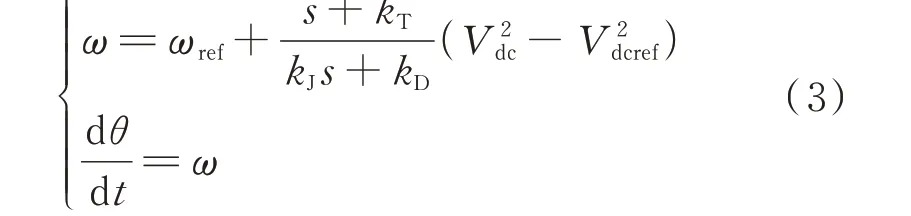
式中:Vdc和Vdcref分别为直流电压实际值和参考值;kT为阻尼系数;kJ为惯量系数;kD为直流电压跟踪系数。
3 关键技术
3.1 并网性能评价
目前,电网对传统矢量控制的柔直并网运行要求,可总结为“稳、准、快”三点:“稳”是指在稳态时不发生各种失稳和振荡问题,电网故障时能够可靠实现穿越;“准”是指稳态运行时功率偏差控制在1%以内,以满足电网运行方式调度安排和电力市场交易需求;“快”是指阶跃响应时间控制在100 ms 左右,以保证柔直快速响应稳控指令。
以往的柔直性能要求标准主要建立在柔直传输功率需求上,尚无柔直支撑电网性能评价要求,可从惯量支撑能力和电压支撑能力两方面考虑。
1)惯量支撑能力。参考同步电机可提供的惯量支撑能力,如式(4)所示[36]。

式中:SB为发电机额定容量;fn为电网额定频率;df/dt为频率变化率。由式(4)可知,惯量支撑能力主要体现的是短时有功支撑能力,有助于缓解电网频率骤变,为电网长周期(秒级以上)调频赢得时间,可基于式(4)对构网型控制柔直给出惯量要求。
发电机的惯量时间常数TJ是其固有属性,一般为5~10 s,是影响其惯量支撑能力的主要因素。与发电机不同,柔直构网型控制参数TJ可根据系统需求整定。需注意的是,构网型控制无法获取电网频率,计算得到的虚拟频率迟于实际电网频率。因此,电磁功率响应滞后于同惯量参数的发电机响应。
惯量时间常数TJ的选取可通过理论计算或仿真分析得出。文献[37]提出了如式(5)所示的电网惯量计算公式。其中,Esg为同步单元动能,SB,sg为电网中所有同步单元总容量,SB,new为电网中所有新能源总容量,Hsys为电网惯量,Hsys>4 s 表示系统惯量充足。一方面,若将构网型柔直作为系统中可提供惯量支撑的同步单元,则惯量时间常数TJ可按照该式进行理论推算,但各参数的准确获取难度较大;另一方面,可通过大规模机电或电磁仿真验证TJ设置的合理性,可考虑相角阶跃、频率突变和系统强弱切换等试验项目[11]。目前的实际工程主要基于仿真计算得出合理参数,一般为秒级。

柔直换流器的惯量支撑能力来源于对侧换流器,对于某些对侧换流器不具备能量提供条件(如新能源接入)的场景,相关文献提出了基于子模块电容储存能量以实现惯量支撑[38-39],但其惯量支撑能力较弱。为彻底解决对侧换流器能量不足的问题,需要对一次系统拓扑升级以避免上述场景。
2)电压支撑能力。电网故障时电网电压下降,若向电网内注入电流,可抬高系统电压,实现电压稳定支撑。构网型控制表现为电压源特性,电网故障时内电势不变,输出电流可瞬时增大,电源注入电网较大电流有助于系统电压恢复。
电网中对于故障期间的电流注入需求应由大电网仿真计算和成套设计校核得出,需要考虑电压稳定支撑、设备一次耐受和断路器开断容量等因素。
英国并网技术规范提出构网型控制换流器需在5 ms 内注入电流以支撑电压,并给出了故障期间注入电流大小范围与故障持续时间要求的曲线[10],如附录A 图A1 所示。其中,绿色区域满足要求,故障初期柔直可注入较小电流,随着故障时间增长,注入电流应增大至其额定值。
不同应用场景下对故障期间柔直的有功和无功需求不一致,如大容量跨区功率传输需优先满足有功需求,弱电网接入需优先满足无功支撑。因此,应结合电网需求对故障期间注入电网的电流有功和无功特性实现分配。
柔直采用构网型控制能发挥惯量和电压支撑能力的前提,除了控制器设计的持续优化,还需要考虑一次设备性能。其中,设备过流能力和能量来源是最重要的两个因素,两者都需要额外经济成本以提升性能。因此,应结合经济成本和技术需求给出构网型柔直的合理并网性能指标。
3.2 宽频谐振稳定
宽频谐振稳定问题是分析电网在某个运行点的线性化系统,属于小信号分析范畴[40]。电网中的电源或负荷在一定的频段内可能存在负电阻效应,若电网中正电阻无法消除该负阻,对应频次的小扰动将会无限放大,导致宽频谐振稳定性问题[41]。
宽频谐振稳定性分析方法大体可分为电磁暂态仿真、基于时域的状态空间分析法和频域稳定分析几大类[42]。其中,基于频域的阻抗分析是应用较为广泛的方法,通过分析换流器与电网之间的相频和幅频特性关系,可揭示系统振荡机理,给出影响因素的灵敏度[43-44]。
3.2.1 高频谐振
对于采用双闭环的传统矢量控制,由于控制链路延时的影响,换流器的输出阻抗特性在高频段表现为负阻尼特性,导致其接入电网后可能存在高频振荡。在中国舟山[45]、鲁西[46]、厦门、渝鄂[47]、张北[1]和如东柔直工程现场调试和试运行过程中均出现了不同频段的高频振荡,后采取各种措施实现了高频振荡抑制。高频振荡的主导环节为内环电流控制。目前,大部分构网型控制依然保留了内环电流控制,高频段的阻抗特性与传统矢量控制区别不大,依然有发生高频振荡的风险。特别是对于柔直带空载线路或新能源接入等场景,高频段系统阻尼较低,高频振荡问题更易发生。
为抑制高频振荡,可参考传统矢量控制解决方案,包括如下几种解决方案。
1)控制器增加阻尼环节。通过附加低通滤波[41]、陷波器[48]和虚拟电阻[49]等方法来增加内环电流控制器相关频段的阻尼,该方案在中国渝鄂工程和如东柔直工程中实现了应用。其无需额外硬件成本,但只能实现在某一控制延时和振荡频段下的阻尼,难以可靠实现全工况、全频段高频抑制。
2)一次系统引入无源阻尼。为补偿控制器负电阻,在柔直换流器交流侧加入类似于电阻-电感-电容(RLC)电路的无源阻尼电路,使柔直换流器输出阻抗在高频段呈现正阻尼特性[50],该方案在中国白鹤滩-江苏工程受端实现了应用。其阻尼效果可靠,但增加了系统成本,而且会额外产生系统功率损耗。
3)稳态直接电压控制。如图3 所示,稳态运行时采用直接电压控制,由内电势和相位直接生成参考波,一定程度上消除了控制和电网特性之间的耦合,可降低高频负阻影响[51];检测到电网故障后,投入内环电流控制环节以实现电流限幅。该方案可应用于含高渗透率电力电子装置的柔直接入场景,其难点主要在于故障精准判断和两种控制的平滑切换。根据工程仿真结果,故障发生后需要在3 ms 内实现故障检测并可靠切换至电流控制。然而,过于灵敏的切换判据易因电网正常波动引起开闭环频繁切换,可考虑将故障判据(如负序电压、负序电流和正序电压等)与过流判据相结合的方法实现故障检测。

图3 构网型直接电压控制示意图Fig.3 Schematic diagram of grid-forming direct voltage control
3.2.2 低频谐振
传统的同步电机在次同步频段因负阻效应会发生低频振荡,构网型控制在模拟同步电机惯量和阻尼特性的同时,也会引入传统同步电机的低频振荡问题[29]。
电力系统稳定器(power system stabilizer,PSS)是广泛应用于电力系统的发电机辅助调节器,通过对励磁调节器提供辅助控制信号,使发电机产生与转子电角速度偏差同相位的电磁转矩分量,抑制低频振荡并增加系统阻尼[52]。构网型控制的有功控制环节可增加辅助环节以实现低频振荡抑制,如附录A 图A2 所示,难点在于控制系数的合理配置。
3.3 暂态稳定
虚拟功角理论可用于分析柔直并网的暂态稳定特性,虚拟功角是指PLL/同步自产的角度与电网电压角度之差,其决定了换流器同步过程的动态特性,但受限于换流器设备的过流能力,在暂态大干扰下柔直换流器需要进行电流限幅,可能使换流器的电压源特性切换为电流源特性,使得换流器的同步稳定特性更为复杂[30]。
3.3.1 故障限流算法
构网型控制的柔直换流器故障限流算法总体可分为以下2 类:
1)电流直接限幅[53]。电流直接限幅方式总体分为两大类:一是过流时依然采用构网型控制,需要对电流参考值进行限幅,内环控制器实现电流指令准确跟踪,也被称为电流饱和控制;二是过流时切换为传统的基于PLL 的矢量控制,通过对电流精确控制实现限流。电流直接限幅的方法速度快、精度高,限幅期间柔直电压源特性转为电流源特性。
2)间接限幅[54-55]。间接限幅通过控制增大内部虚拟阻抗实现限流,其本质上可等效为增大换流器与故障点之间的电气距离。在限流处理时,虚拟阻抗可平滑增大,故障期间外部特性表现为电压源串联可调阻抗的特性。
3.3.2 暂态功角失稳
构网型控制在大干扰进入限流模式后,当采用直接电流限制模式时,会使换流器的电压源特性切换为电流源特性,其运行特性如图4(a)所示,功角曲线由L1变化为L2,稳定裕度大幅减小[56]。图中:Pref为运行指令值;Pmax为换流器额定容量。

图4 构网型控制虚拟功角曲线Fig.4 Virtual power angle curves of grid-forming control
构网型控制稳定运行于点a,电网故障时运行点a切换到曲线L3的点b,Pref与电磁功率产生加速面积S1,虚拟功角沿曲线L3持续增大;点c故障切除,运行点切换至曲线L2的点d,然后进入减速区域,由于构网型控制动能依然大于0,虚拟功角继续沿曲线L2增大,若运动到点e前可减速到0,则功角可以回退到点d直至限流模式取消并最终回归到点a;若运动到点e无法减速到0,则系统将失稳。
由上述分析可知,构网型控制暂态稳定特性受限于限流算法,特性较为复杂。为了提高构网型控制暂态稳定特性,可考虑如下解决措施:
1) 降低有功参考值。参考发电机减小机械功率措施,故障期间降低有功参考值,如图4(b)所示,可同时实现减小加速面积和增大减速面积的目的。
2) 增大电磁功率输出。参考发电机强行励磁措施,故障时通过电压控制提高内电势,从而使电磁功率曲线L2上移,一定程度上可减小加速面积。
4 问题与挑战
4.1 控制参数设计
4.1.1 系统支撑需求与传统性能的矛盾
系统支撑需求是指电网在发生大小扰动时,柔直能够提供电网支撑的能力;传统性能评价主要指对直流“稳、准、快”的要求。构网型控制主要并网参数包括惯量时间常数TJ、阻尼系数D和调压系数kpv等,其决定了并网特性,各参数对系统需求和柔直性能的影响如表1 所示。
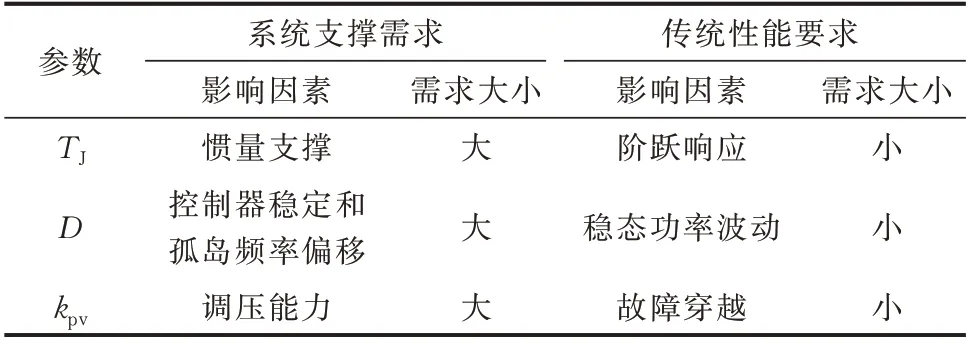
表1 构网型控制参数影响分析Table 1 Parameter influence analysis of grid-forming control
一方面,TJ是惯量支撑能力的体现,发电机中该参数的取值范围约为6~8 s,如式(4)所示,TJ越大越有利于系统频率变化时的惯量支撑能力;另一方面,TJ是控制器有功差值的积分时间常数,TJ越大有功阶跃响应越慢,越不利于柔直快速执行系统指令。
D表示对系统频率变化的阻尼,满足式(6),发电机中该参数很小,可忽略不计,但构网型控制中由于小干扰稳定和孤岛切换的需求,需要设置较大值。一方面,D越大调频能力越强,且在孤岛运行时控制得到的频率偏差越小;另一方面,电网频率实时波动,基于“分区分级”的调频需求,并没有柔直长期大幅参与调频的需求,而D越大稳态功率波动越大,不利于电网开展调度方式安排和电力市场交易。

式中:Δf为电网频率偏离额定频率的值。
kpv表示电压控制比例-积分(PI)环节的比例系数,对于电压控制起到主导作用,其体现了电网电压偏离参考值时柔直的调节能力。kpv越大表示调压能力越强,越有利于系统的暂态稳定;而kpv设置过大将导致电压跌落后,内电势增大较快,输出电流过大,难以实现故障穿越。
4.1.2 强弱系统对稳定需求的矛盾
合理的控制参数应保证在各种强度系统下的稳定要求,根据文献[18]的研究结论,随着电网强度增大,构网型控制小信号模型的系统极点将逐渐右移,直至出现在右半平面造成小信号不稳定,且主导极点具有较大虚部,系统阻尼比小。解决该问题关键是提高控制器的阻尼,可通过增大控制器的虚拟阻抗将强系统转化为虚拟弱系统[57],但虚拟阻抗若设置较大,可能使得功率极限小于额定功率,导致功率传输受限。
为解决不同工况对参数需求的差异,相关研究提出了附加控制或参数自适应方法[58],难点在于对工况的准确快速识别以及参数的合理匹配。
4.2 一次设备能力
与同步电机可承受短时6~7 倍过流能力不同,电力电子设备过流能力较差。目前,中国柔直工程长期过负荷能力一般不超过1.1 p.u.,难以发挥故障时的支撑能力,其中,绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)是限制柔直工程过负荷能力的关键环节。一方面,设计具有更大长期通流能力的设备是解决上述问题的根本方案,可通过提高IGBT 芯片电流密度或增多芯片并联个数实现IGBT 核心器件的更大通流能力,但需要平衡技术需求与经济性之间的关系[59]。另一方面,可发掘现有设备短时过流能力以实现短时惯量和电压支撑,大电流导致的温升和瞬时关断尖峰电压是决定IGBT 过流能力的核心要素。
IGBT 瞬态热阻曲线可反映其短时温升过程。某4.5 kV/3 000 A IGBT 瞬态热阻曲线如附录A 图A3 所示,在输出电流增大约1 s 后IGBT 温度达到稳定值,利用该1 s 内的温升过程可实现故障期间短时大电流输出。
关断尖峰电压是指子模块上下2 个开关器件交替开通和关断过程中在杂感上产生的电压,其满足式(7)。

式中:Uc为电容稳态运行电压;Ls为子模块杂感;di/dt为开关器件交替开通关断过程中的电流变化率;Umax为产生的最大关断电压,其高于IGBT 反向关断额定电压时将导致击穿。因此,在考虑故障期间的短时电网支撑能力时应考虑瞬时电压和电流对电力电子器件的影响。
4.3 能量来源
构网型控制换流器实现电网有功支撑需求的能量来源于两方面:对于毫秒级的能量主要来源于储存在两端换流器电容内的能量;对于长期的能量支撑,则需从对侧获取,而对侧在某些系统条件下无法提供能量支撑,因此需额外设计能量回路。
1)在直流电压控制站接入的交流电网布置调频调峰设备,如储能装置。构网型控制换流器有功功率波动传导至对侧后,调频调峰设备平抑该功率波动。该方案依然会对电网产生一定影响,且具有一定延时。
2)在直流侧布置储能。通过有源模块化多电平换流器(modular multilevel converter,MMC)方案[60]或将储能直挂于直流侧,如图5 所示。构网型控制换流器对电网有功支撑的能量来源于直流侧,不会对另外一侧的交流电网产生影响。两侧换流器可实现直流电压控制与构网型控制的切换,以满足两侧电网需求。该方案实现的技术难点主要是高压绝缘、电池荷电状态均衡和水冷联合设计等技术问题,同时应考虑消防和经济性问题。

图5 直流储能方案Fig.5 DC energy storage schemes
5 结语
以新能源为主体的新型电力系统需要灵活的输电技术作为支撑,采用构网型控制的柔直技术可在跨区大容量功率传输的同时,实现系统支撑。本文概述了柔直构网型控制的关键技术和问题,具体结论如下:
1)相较于传统柔直矢量控制,构网型控制底层控制逻辑发生较大变化,可为电网提供惯量和电压支撑,需要结合设备能力以及电网稳定需求提出并网性能要求。
2)构网型控制的并网特性与电网耦合关系较大,控制器稳定需求与系统性能要求存在一定矛盾。为同时满足两者要求,不仅需要基于理论分析和仿真验证对控制参数持续优化,还应探索鲁棒性更强、响应更优的新型控制策略。
3)宽频振荡问题是影响柔直实际工程应用的一大难题,传统的阻尼控制对于改善相应频段的阻抗特性具有较优效果,但无法实现全频段振荡抑制。稳态直接电压控制和暂态电流抑制结合的新型策略可以有效解决全频段稳定性问题。
4)一次设备性能的提升需要大量的成本投入,综合考量经济性和技术需求,应挖掘现有设备短时过流能力和能量支撑能力,从而使构网型控制在目前技术条件下发挥出更大技术优势。
本文在研究过程中得到南瑞集团有限公司项目(JS2001741)的支持,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
现代电力(2022年2期)2022-05-23
现代畜牧科技(2021年4期)2021-07-21
流行色(2020年9期)2020-07-16
电子制作(2019年11期)2019-07-04
家庭影院技术(2018年9期)2018-11-02
中国惯性技术学报(2018年1期)2018-05-10
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
CHIP新电脑(2017年6期)2017-06-19
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22