
基于APDL的电磁轴承有限元分析方法
2023-02-27 09:55梁清鹤
机械工程师 2023年2期
梁清鹤
(国家能源集团 宁夏电力公司,银川 750011)
0 引言
我国“十四五”规划纲要提出,力争2030年前实现碳达峰,2060年前实现碳中和,这是中国向国际社会做出的一项庄严承诺。新能源的储能方式在其中将起到关键作用。飞轮储能是利用高速旋转的转子将电能转化为旋转动能存储起来的物理储能方式。为减少飞轮转子运行时的风阻和机械摩擦,飞轮转子都采用磁悬轴承支承并且运行于真空系统中。具有更高储能密度和功率密度的储能飞轮是未来技术发展的必然趋势,也带来诸多相关技术问题,如磁悬浮轴承技术、高速电动机技术、真空密封技术、高强度材料技术等。其中,磁悬浮轴承技术是实现高储能密度与高功率密度储能飞轮的最重要的关键核心技术[1-3]。
电磁轴承作为机电磁一体化的综合系统,其性能受结构参数、电磁参数及控制系统参数的相互影响。其中合理的结构参数设计是保证电磁轴承性能指标的前提。本文给出径向电磁轴承的结构基于APDL语言的参数化设计分析方法,实现对不同性能电磁轴承的快速响应设计,对磁轴承的分析设计具有较强的现实意义。
1 电磁轴承的结构设计
1.1 电磁轴承结构特点
电磁轴承是通过对电磁铁线圈中电流进行实时控制,使其产生受控的电磁力将转子悬浮于空间,在转子与定子之间没有任何机械接触。与传统滚动轴承相比,电磁轴承具有无接触、适合高速、动力特性易于控制等特点,现在已成为高速旋转机械的典型支撑单元[4-5]。
图1为典型径向电磁轴承结构布局,定子磁极极性在一个给定旋转平面变化序列为N-S-S-N-N-S-SN。此种磁铁结构应用最普遍,也是最简单、最低成本的解决方案。
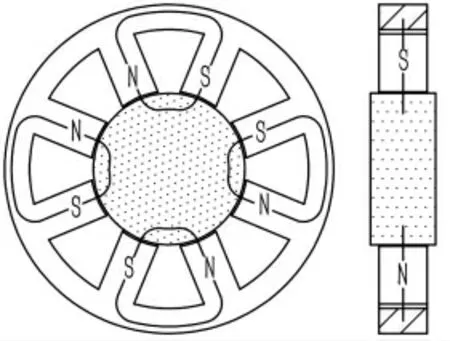
图1 径向电磁轴承结构布局
1.2 径向磁轴承模型结构
根据径向电磁轴承典型结构,建立径向磁轴承三维结构模型,如图2所示。
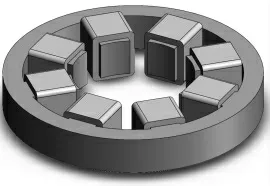
图2 径向电磁轴承三维结构模型
径向电磁轴承主要由铁芯和电磁线圈组成。定义径向电磁轴承的结构尺寸参数变量,如图3所示。为了研究方便,预设了一组磁轴承结构参数,如表1所示。
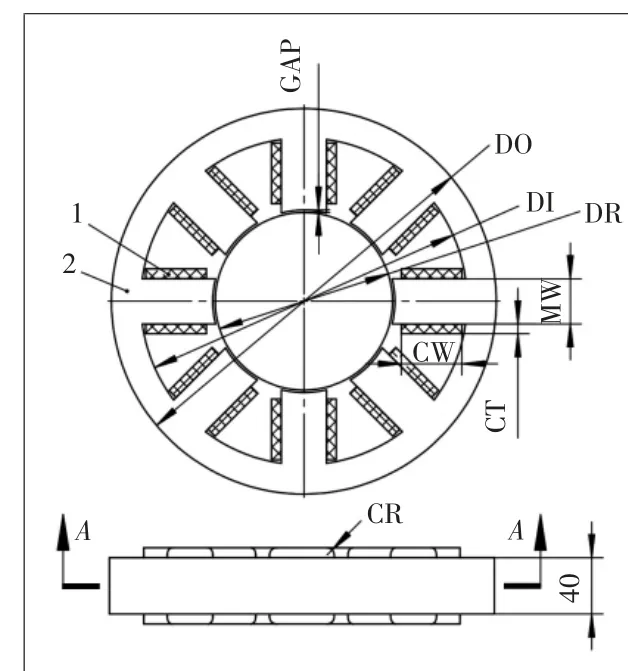
图3 磁轴承结构组成及参数
2 径向电磁轴承三维模型仿真
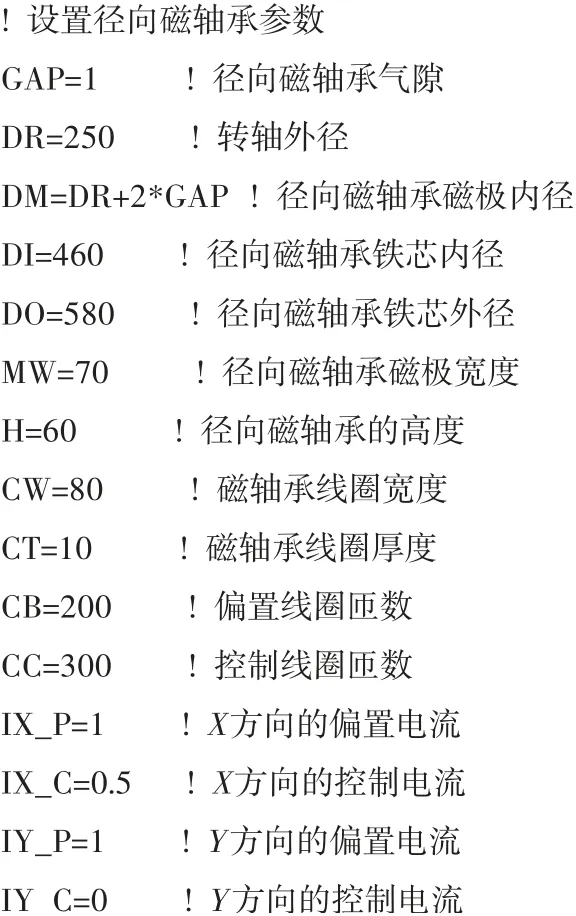
2.1 定义磁轴承参数
虽然径向电磁轴承为三维对称结构,但线圈加载的电流源不对称。因此,必须使用全尺寸完整模型进行三维仿真分析。为方便三维模型的快速尺寸优化,本文采用了APDL语言的三维参数化建模。根据表1的模型参数编程,程序表述如下:
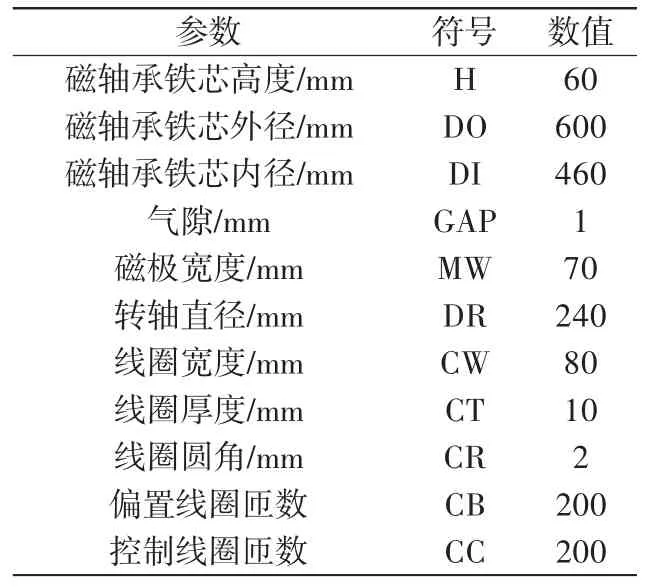
表1 径向磁轴承主要设计参数
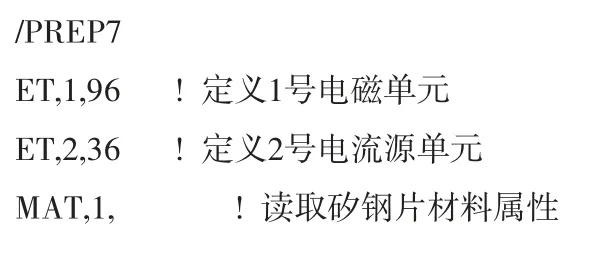
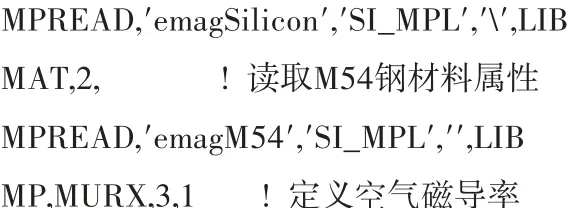
2.2 定义单元和材料
本文需要定义两种单元类型,分别为SOLID96单元和SOURC36 单元。SOLID96单元是电磁场分析专用单元,可用于三维模型的饱和区域、永磁区域及空气区域的建模。
SOURC36 是由预定义的几何结构组成,用于向磁场问题提供电流源数据。本文使用SOURC36 单元来定义电磁线圈的电流传导区域。
磁轴承铁芯模型采用是矽钢片材料,读取材料库矽钢片文件的B-H曲线,如图4所示。转轴采用的是M54钢材料,读取材料库M54钢文件的B-H曲线,如图5所示。定义空气的相对磁导率为1.0。
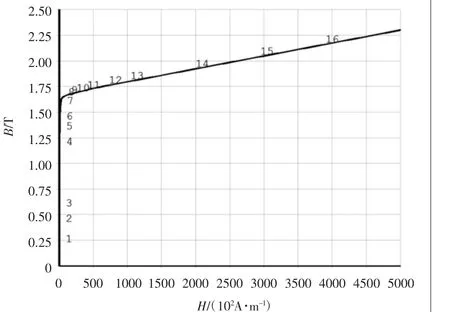
图4 矽钢片的B-H曲线
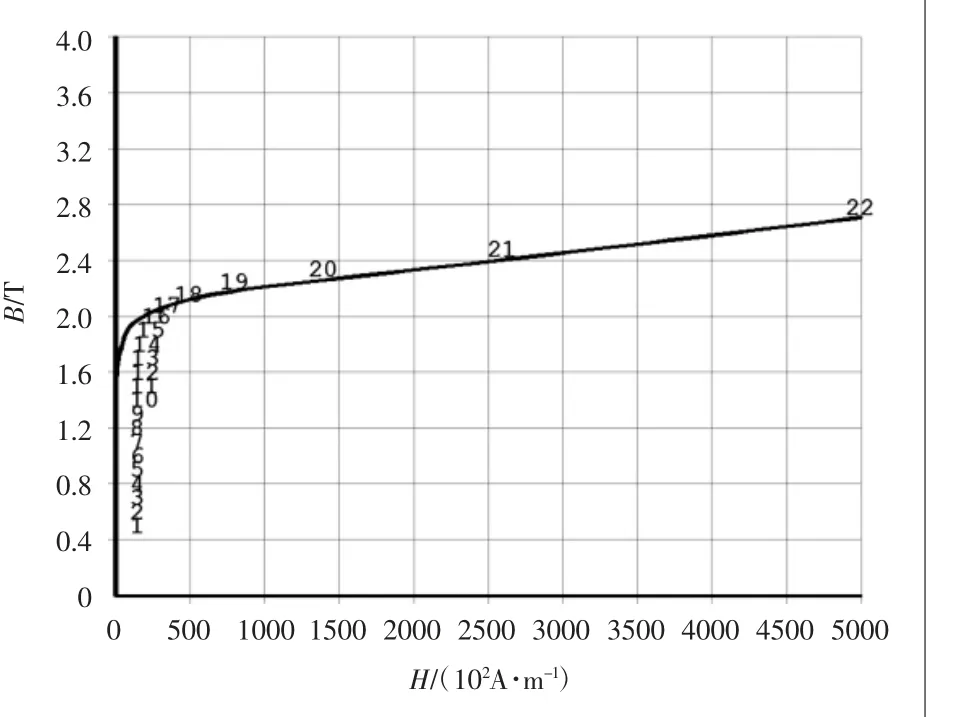
图5 M54钢的B-H曲线
利用APDL定义单元类型及材料属性的程序如下:
2.3 建立模型与网格划分
仿真研究的目的是计算转轴所受的电磁力大小与磁轴承的磁通量是否饱和。磁轴承之间的气隙磁通量是一个重要考虑因素。因此建模时需将磁轴承的气隙单独建模。在建立完成整个模型后,还需建立一个空气场包裹住转轴与磁轴承。在建立多个三维圆柱形模型的基础上,本文通过WPROTA和WPOFFS命令把工作面移动到指定位置,利用VSBW命令分割成磁轴承铁芯形状,再使用VGLUE命令拼接成整体。使用CM分别定义:转轴的体模型为rotor;磁轴承的体模型为magbearing,空气的体模型为air。
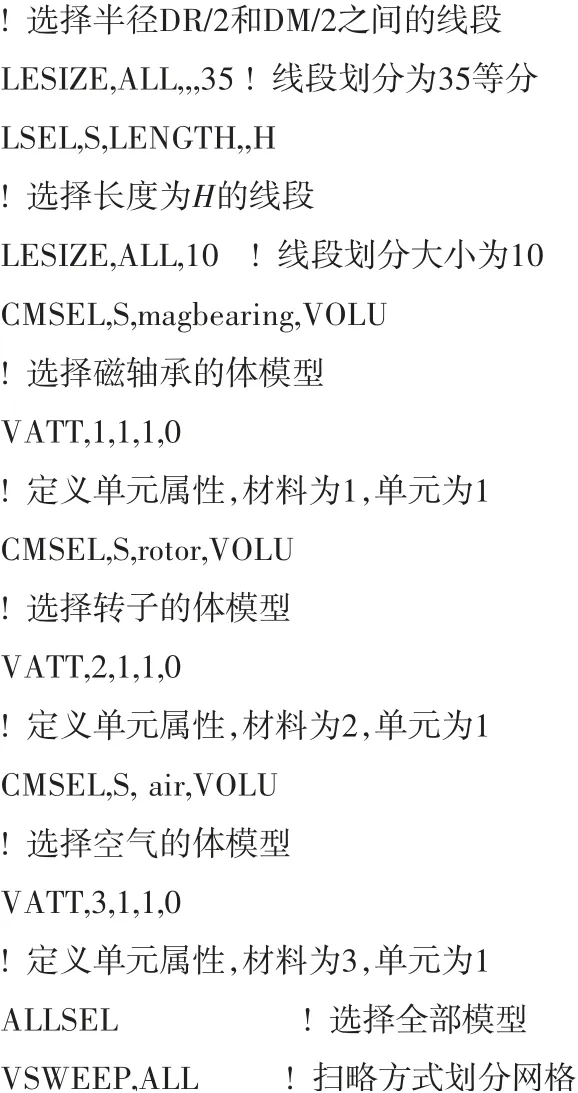
模型建立完成后,应划分为有限元网格单元。先把模型分割成易于划分的形状,再通过扫略的方式进行网格划分。铁芯与转轴划分完成后的单元如图6所示。外围空气场的单元如图7所示。其中APDL语言表述如下:
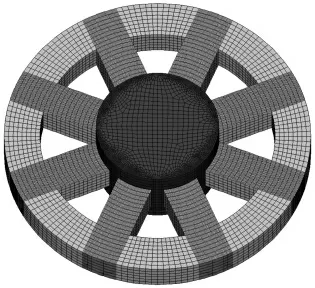
图6 铁芯与转轴的网格划分

图7 外围空气场的网格划分

划分完网格后,选择转轴的单元,把其定义为一个部件并通过FMAGBC命令施加力标志。FMAGBC是ANSYS软件中自带的宏程序,它能通过施加虚位移原理和麦克斯韦方程组直接计算出力和力矩。
最后,通过VLSCALE命令,将整个模型单位转换为米。
2.4 加载边界条件和载荷
标量磁位法是静态电磁分析的首选方法,本文也采用此法对径向电磁轴承进行电磁仿真分析。使用标量磁位法求解需磁力线平行边界条件自然满足,因此在求解模型时无需再单独设置边界条件。
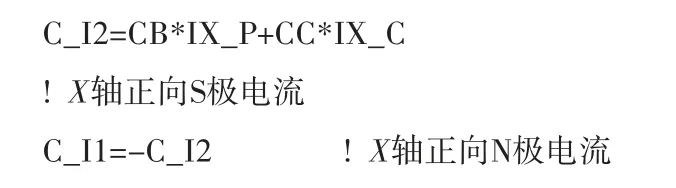
为磁轴承施加电流源,本文磁轴承中拥有8个圆周均匀分布线圈,可以利用*DO循环建立线圈。本文采用SOURC36单元和RACE宏命令来搭建环形跑道线圈。磁轴承是采用差分的方式加载电流,例如:需要产生X正方向的电磁时,X正方向的线圈电流为偏置电流的安匝数加上控制电流的安匝数,X负方向的线圈电流为偏置电流的安匝数减去控制电流的安匝数。用APDL语言表述如下:
施加线圈后,电磁轴承和转轴的有限元模型如图8所示。
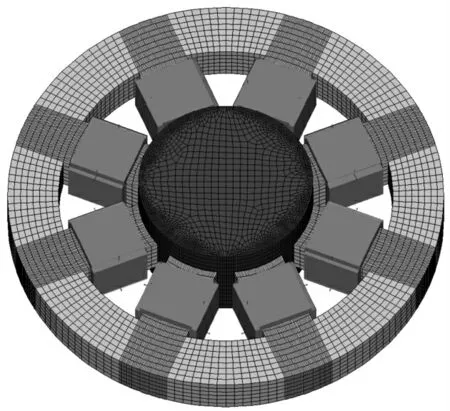
图8 施加电流源后的径向磁轴承有限元模型
图8中,SOURC36单元表示的线圈,它不能通过实体建模的方式来实现,只能直接定义生成。所以线圈不需要划分成有限单元格,就可直接求解。
2.5 选择求解器和求解
本文采用了标量磁位法对电磁轴承进行求解。标量磁位法将电流源以基元的方式单独处理,无须为电流源建立模型和划分网格,大大简化了模型的复杂程度,提高了分析效率[6]。
标量磁位法分为3种不同的求解方法:差分标势法(DSP)、通用标势法(GSP)和简化标势法(RSP)。
DSP法适用于单连通铁区(即连通区存在气隙的情况),单连通铁区是指不能为电流源所产生的磁通量提供闭合回路的铁区;GSP法适用于多连通铁区(即连通区不存在气隙的情况),多连通铁区是指可以构成闭合回路的铁区;RSP法适用于模型中不含铁区,或有铁区但无电流源的情况。本文分析的电磁轴承明显包含多处气隙,属于单连通铁区,适用于差分标势法(DSP)进行求解[7]。
DSP方法主要分为两个步骤进行求解:首先,假设磁轴承铁区中的磁导率无限大,只对气隙与外围空气进行求解;然后,恢复所有原材料的电磁特性,进行最终求解。
采用标量磁位DSP法求解电磁轴承APDL语言表述如下:
2.6 仿真结果
当磁轴承的X正方向加载了0.5 A控制电流(负方向为-0.5 A)时,磁通密度沿磁轴承和转轴形成了4个网络回路(如图9),X正方向的矢量磁通密度最大。
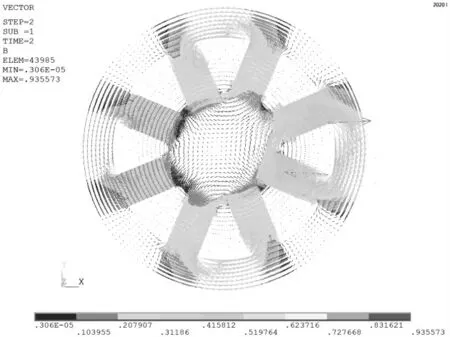
图9 磁通密度的矢量图
磁轴承和轴承磁通密度的节点云图如图10所示。节点磁密最大处位于X轴正方向磁极的根部,数值为1.159 T。从云图中能明显看出,磁轴承的X轴正方向磁极的磁密最大,X轴负方向磁极的磁密最小,Y轴正负方向磁极的磁密对称分布,这与加载电流源的情况完全一致。
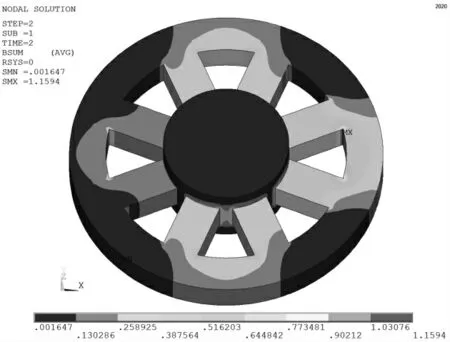
图10 磁轴承和轴承磁通密度的节点云图
根据前面给模型施加了力的标志,通过FMAGSUM宏命令,求出转轴受到X方向的力为327.69 N,Y方向的力为1.84×10-2N,Z方向的力为3.95×10-8N。
3 结论
电磁轴承仿真的目的是计算磁轴承在不同结构参数下的电磁力及磁场密度,进而在应用于储能飞轮设计时,可以准确计算出储能飞轮的径向磁轴承的承载力,并能通过计算磁轴承的磁密判断磁轴承是否饱和。
本文应用ANSYS 自带的APDL 语言编写了径向电磁轴承的仿真程序,能对不同设计参数的径向电磁轴承实现快速求解仿真,可实现储能飞轮径向电磁轴承的快速响应设计,提高设计效率,缩短研发周期。
猜你喜欢
煤气与热力(2021年6期)2021-07-28
上海大中型电机(2021年1期)2021-06-09
煤气与热力(2021年4期)2021-06-09
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
数学年刊A辑(中文版)(2019年3期)2019-10-08
山东冶金(2019年2期)2019-05-11
通信电源技术(2018年3期)2018-06-26
能源(2017年12期)2018-01-31
