
用于中小型飞行模拟器的球带幕投影镜头的光学设计
2023-02-19 12:48刘宵婵李维善
应用光学 2023年1期
刘宵婵,陈 琛,宋 涛,李维善,张 歆,高 松,杨 博
(秦皇岛视听机械研究所有限公司,河北 秦皇岛 066000)
引言
近年来,飞行模拟器已经成为航空航天领域广泛使用的现代化训练设备,为飞行员提供了安全、经济、高效的仿真训练,飞行模拟训练及考核也成为飞行员在驾驶真实飞机之前必不可少的训练步骤。飞行员在训练过程中接收到的视觉信息全部来源于视景系统[1-2],并以此做出及时正确的判断,故视景系统的准确性和视觉效果直接影响着模拟器的综合性能,并最终影响着训练效果。
视景系统由图像源和光学成像系统两部分组成。图像源是模拟器需要显示的机场跑道、建筑物等舱外景象[3]的内容,光学成像系统则是使这些景象得以显示的系统。目前,光学成像系统主要分为实像、虚像及头盔3 种方式,本文主要针对实像方式展开研究,即通过投影方式把舱外景象投射出来。目前,鲜有文献专注于视景系统中投影光学系统的研究,已发表的文献[4-6]为了获得较强的沉浸感,采用了尺寸较大的球幕(半径3.5 m~4.5 m),造价高,对场地条件要求高,在训练效率、灵活性和经济性方面有所欠缺。文献[7]和文献[8]采用了单机位的小形球幕投影方案,球幕半径仅为0.8 m,还需在最佳观看位置的球心处放置投影机,且像素利用率低,使用效果不佳。为解决上述问题,本文设计了一款球带幕投影镜头,镜头放置于球带幕上沿(或下沿)即可,使单机位具有高像素利用率的中小型球带幕投影方案得以实现,在减小体积的同时,提供了较强的沉浸感。
1 总体投影方案设计
一般情况下,民用飞行模拟器对视场的基本需求为:水平方向视场角不小于150°,竖直方向视场角不小于40°。本文采用半径为2 m 的球带幕,如图1 和图2 所示,人眼位于球心处,球带幕在水平方向相对于人眼的张角为180°,在竖直方向相对于人眼的张角为85°。这样既可以获得较强的沉浸感,体积也不会过大,符合本系统的设计初衷。球带幕采用复合材料,在球带幕表面涂覆具有光学性能的涂料,在加工工艺上严格控制球幕尺寸,避免出现变形等缺陷。
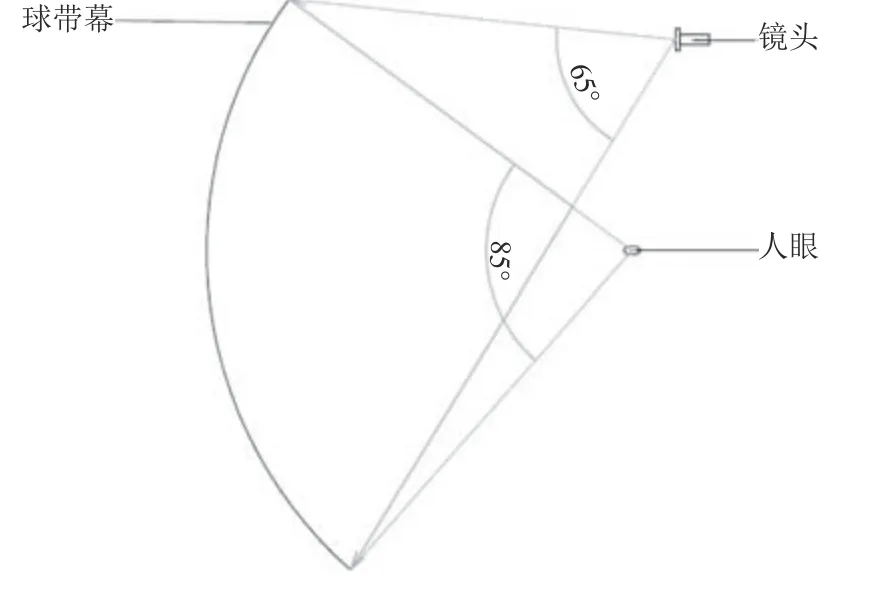
图1 竖直方向投影光路图Fig. 1 Optical path of projection in vertical direction

图2 水平方向投影光路图Fig. 2 Optical path of projection in horizontal direction
现有球幕投影采用的方案包括多台拼接方案和中心单机位方案。多台拼接方案需要使用多台投影机,机器占用较多空间,且需通过融合技术实现,调试及维护过程繁琐。中心单机位方案[9],即镜头置于球心处,其到球幕边缘各点的视场角一致,约180°,那么若使球幕上投满图像,则在像素利用率最高的情况下,芯片端与整个球幕共轭的区域应为以芯片短边[10]为直径的圆,此时的像素利用率仅能达到41%~49%,会造成像素和光通量浪费严重,且投影机需置于球幕中心,占据了最好的观影位置,也易出现光线被遮挡的现象。故本文提出了单机位偏轴投影方案,原理如图3 所示,即将一台投影机置于球带幕上沿(或下沿)。针对该方案设计的球幕投影镜头以芯片长边为像高,芯片上参与成像的区域如图4 所示。可将最高像素利用率提高至75%~90%,且球幕空间内不存在遮挡问题。本方案总体设计参数指标如表1 所示。

表1 系统参数Table 1 Parameters of system
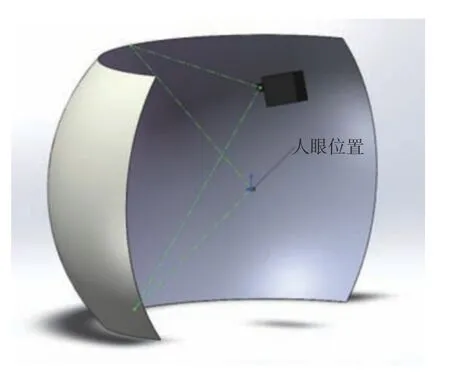
图3 投影系统效果图Fig. 3 Effect diagram of projection system
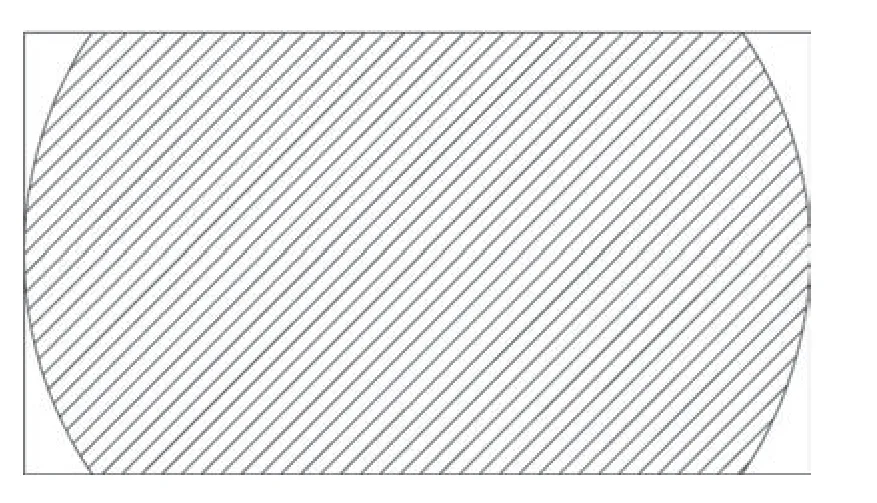
图4 芯片成像区域Fig. 4 Diagram of chip imaging area
2 投影机引擎类型及关键参数的选取
2.1 投影机技术类型选取
在选择投影机时主要考虑投影机的光学引擎[11]类型,及其亮度、分辨率、对比度这几个关键参数。目前主流投影机主要包括3LCD,DLP,LCOS这3 种技术类型。3LCD 型投影机价格低廉,但对比度和分辨率较低,由于看得见像素结构,会有隔着窗子看图像的感觉,且防尘较差,用久了色彩会偏黄,故在模拟器中一般不采用该类型投影机。DLP 技术又分为单DMD 芯片技术和3DMD 芯片技术,单DMD 芯片技术投影机具有高对比度、画面细腻、小尺寸、高均匀性、价格低等特点,是高质量中小型投影系统经常采用的投影机。3DMD芯片技术投影机在成像质量方面更胜一筹,但体积大、价格高,一般只在大型工程中使用。LCOS型投影机在色彩、亮度、光效率和分辨率方面都有较好地表现,但黑白对比度不佳,目前仅有2 个日本品牌的投影机采用了此项技术,局限性较强。因此本文选取单DMD 芯片技术投影机。
2.2 投影机关键参数的确定
亮度计算公式为

式中 θ为人眼在竖直方向对幕的张角,约为85°。当平均像素分辨率APR达到4.5 arcmin/pixel[4]时,可计算得到竖直方向的像素数H至少为1 133 个。
水平方向的平均像素分辨率为

式中ω为人眼在水平方向对幕的张角,约为180°。当平均像素分辨率APR达到4.5 arcmin/pixel 时,可计算得到水平方向的像素数ω至少为2 400 个。
综合考虑,本文选择一款基于单DLP 芯片技术的工程投影机,其亮度为5 000 lx,分辨率为4 k(3 840×2 160 pixels),芯片尺寸为11.94 cm (0.47英寸)。
3 投影物镜设计
3.1 参数的确定

表2 镜头参数Table 2 Parameters of lens
3.2 镜头设计
该镜头属于鱼眼镜头,由于投影机光学引擎中存在体积较大的分色合色棱镜,故镜头需要较长的后工作距。该镜头的设计难点主要是满足大视场、大反远比(后工作距/焦距)、高分辨率,以及照度均匀度等指标要求,此外,畸变和场曲也需要采用不同于常规系统的方法进行分析。
关于照度均匀度,现有光学书籍中给出的轴外像点照度公式[12]为E'=E'0cos4ω'。由此可知,轴外点照度随 cos4ω'下降,若按此规律,在120°视场处,相对照度就只有6.5%了,与实际情况相差甚远,显然这种计算方法对于大视场非相似成像的情况已不再适用。文献《物镜像面相对照度计算方法》[13]中为了排除孔径光阑像差的影响,从各视场发出的光线在第一面的受照面元开始分析,通过矢量分析和推导,得到大视场非相似成像的相对照度计算公式 :

图5 最大视场入射主光线与第一面法线的夹角Fig. 5 Angle between main incident light from maximum field of view and the first surface normal line
关于畸变,相似成像原理不适用于鱼眼镜头。本系统采用等距投影[1]成像关系,即:


关于场曲,它是球面透镜成像系统的固有像差。与常规光学系统不同的是,本设计中物面(屏幕)也为球面,物面的弯曲必然会对系统的场曲造成一定影响。如图6 所示,当物面为平面时,视场边缘物点Y对应的理想像点为Y0',由于存在场曲(假设像散为0),Y点实际对应的像点为Y'。当物面弯向像面时,边缘视场物点Y1的 像点移至Y1',即像面更加趋近于近轴像平面。显然,物面向像面弯曲时,相当于对场曲进行了一定的补偿,有利于场曲校正。可将物面曲率半径所决定的矢高作为附加的场曲量,用Xp表示。若垂轴放大率为β,则该附加量经系统放大后在像方产生的场曲量可表示为X'p=-β2Xp。在不考虑高级像差的前提下,物面为球面的光学系统最终匹兹伐场曲[7]为


图6 匹兹伐面随物面曲率的变化图Fig. 6 Change diagram of Petzval surface with curvature of surface
大视场、大反远比符合反远距结构[14-16]光学系统的特点,所以本文选取一个视场接近的反远距结构作为设计起点。如图7 所示,初始结构为一个8 片式光学系统,该结构中第一镜片形状过于弯曲,且第二面已接近半球面,造成了极高的加工难度。另外,结构中有部分光线溢出,这是鱼眼镜头结构中的常见问题。光线入射角度越大越容易发生全反射现象,从而导致光线溢出,只有解决了光线溢出问题,才可称之为一个稳定的鱼眼镜头结构。首先通过调节敏感面的曲率半径或材料,使全部视场的光线到达像面,通过缩放焦距,得到符合焦距目标值的结构。初始结构属于典型的反远距型结构,包括具有负光焦度的前组和具有正光焦度的后组,初始结构的反远比为2.5∶1,本文设计的最终结构的反远比应达到6∶1。因此,后工作距还需要做出较大的调整,可通过拉大两组之间的距离,使像方主面后移来增加后工作距。

图7 初始光学结构Fig. 7 Diagram of initial optical structure
对具有极大视场角的鱼眼镜头,常规像差中边缘视场最大孔径处的弧矢彗差一般不作为优化指标进行控制。此外,还需要控制以下7 种高级像差[12]:
1) 轴上点边缘口径的高级球差;
2) 边缘视场最大孔径的子午视场高级球差;
3) 边缘视场孔径高级子午彗差;
4) 边缘视场的视场高级子午彗差;
5) 高级细光束子午场曲;
6) 高级细光束弧矢场曲;
7) 色球差。
将焦距、后工作距等结构参数调整到目标值后,开始进行优化设计。这一过程主要是将上述像差控制在合理的范围内,并将工艺性纳入考虑。前面提到第一片透镜的面形已经为光学加工造成了极大的难度,且入射光线在此面产生了相当大的偏角,引入了大量像差,特别是彗差、畸变。为减小偏角,将首片透镜材料替换为高折射率玻璃H-LAF1。将第二片透镜改为双凹形负透镜,起到进一步分担负光焦度的作用。将前组复杂化,为增加像差校正的自由度,加入了一个弯月形负透镜,再将后面的双胶合透镜改造为双分离透镜,增加了一个曲面和一个间隔的变量,这样更有利于校正像散和场曲。后组仅保留了一对双胶合透镜和一个凸透镜,采用高折射率玻璃材料HZF52A 和低色散玻璃材料H-FK61,使后组结构在去掉一个镜片的情况下,还能够对前组的剩余像差进行充分校正。
3.3 设计结果及评定
优化后的最终光学结构如图8 所示。由图8可以看出。系统由8 片透镜组成,镜片最大口径控制在78 mm 以内,每片透镜的形状均易于加工,具有较好的工艺性。系统各视场像元尺寸均小于芯片单像素尺寸(2.71 μm),如图9 所示。系统横向色差如图10 所示,可看出横向色差小于1/2 像素尺寸。场曲和相对畸变如图11 所示,该畸变是由前述公式计算得到的相对畸变,控制在13.2%以内。相对照度如图12 所示,可看出相对照度达到68%。光学传递函数如图13 所示。从图13 可看出,全视场MTF 值在奈奎斯特频率185 lp/mm 处均达到0.4 以上,为加工及装配过程中产生的误差预留了足够的空间。

图8 最终光学结构Fig. 8 Diagram of final optical structure

图9 点列图Fig. 9 Spot diagram
图10 横向色差Fig. 10 Curves of lateral chromatic aberration
图11 场曲和畸变Fig. 11 Curves of curvature and distortion

图12 相对照度Fig. 12 Curves of relative illumination
图13 光学传递函数Fig. 13 Curves of MTF
4 结论
为满足高效率、低成本与较强沉浸感的中小型飞行模拟器的使用需求,本文给出了模拟器球带幕投影系统的设计方案,并基于该方案设计了一款鱼眼投影镜头。根据实际需求,确定了球带幕的尺寸,给出了通过关键参数选取投影机的方法。基于投影机的参数以及方案指标要求,设计了一款具有174°视场角和6∶1 反远比的投影镜头,实现了单台机器置于银幕上沿就可以投满整个球带幕的投影方案。文中针对鱼眼镜头的特殊性,对其照度均匀性、畸变及场曲进行了深入分析和讨论。该镜头仅由8 片透镜构成,满足4 k 分辨率的高质量投影要求,且具有较好的工艺性。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
科学技术创新(2021年25期)2021-09-11
光源与照明(2019年4期)2019-05-20
中国医疗设备(2019年1期)2019-01-15
照明工程学报(2017年3期)2017-07-10
传感技术学报(2016年6期)2016-09-09
