
永磁同步电动机控制技术综述
2023-02-18 02:30高常进张清鹏
中国特种设备安全 2023年1期
谢 然 高常进 张清鹏 卞 敬
(天津市特种设备监督检验技术研究院 天津 300192)
电梯作为现代建筑内的垂直交通运输工具已经和人们的生产生活密不可分,随着经济和科技的迅速发展,电梯也得到迅速发展,电梯曳引机中的电动机作为电梯的核心部件也在近几十年中得到了很大的改进。
电梯驱动电机主要有直流电动机、异步电动机、永磁同步电动机(PMSM)3种类别。其中,直流电动机与其他电动机相比具有调速性能好、控制方式简单、起动和制动转矩大、过载能力强的优点。但其结构复杂,制造成本较高,可靠性稍差,因此应用范围受到了限制。尤其近些年,因大功率电力电子器件的迅速发展,整流逆变技术、功率和可靠性的不断提高,与电力电子装置结合并具有直流电机特性的新型电机不断涌现,传统的直流电动机已经退出了电梯驱动领域的历史舞台。目前,电梯驱动电动机主要采用异步电动机和永磁同步电动机。异步电动机工作原理主要凭借定、转子间的电磁感应在转子绕组内形成感应电动势以实现机电能量的转换[1],在电梯领域现主要配备于载货电梯。随着永磁材料的发展,永磁同步电动机制造技术也得到了迅速提升。与传统的电励磁电机相比,永磁同步电动机结构更加简单、运行可靠性更强、机体的尺寸体积更小、产品质量更轻、损耗小、机械效率更高。同时,电机的形状和尺寸也可以灵活多变,适应于各种安装场所。[2]因此,永磁同步电动机凭借上述性能优势,作为近十几年内的新型电机已经在电梯驱动领域得到了广泛应用。
1 永磁同步电动机控制方法简述
永磁同步电动机控制方法主要采用变频调速方法。交流电动机的变频调速系统主要控制形式分为开环控制和闭环控制。比较2种控制方式,因永磁同步电动机在开环控制方式下无法将电机转子位置信号和电机运行的实际速度信号作为实时反馈信号,易出现电机运行失步和突然停车等问题,从而造成永磁同步电动机退磁故障,所以开环控制的变频调速系统并不适用于永磁同步电动机。
为精确得到电机的转子位置信息和电机运行速度信息,实现永磁同步电动机的闭环控制,目前主要采用的方法是在电机的转轴上安装高精度的传感器。其中,电梯行业常见的传感器主要为光电编码器来检测电机的转子位置信息和电机转速。永磁同步电动机闭环控制变频调速系统图如图1所示。

图1 永磁同步电动机闭环控制变频调速系统图
永磁同步电动机闭环控制变频调速系统中电动机控制技术是控制系统的核心功能。永磁同步电动机作为曳引机制造领域主流的产品,控制技术主要有恒压频比控制(V/f)、矢量控制(FOC)和直接转矩控制(DTC)。[3]
V/f控制方法是通过建立稳态的永磁同步电动机等效电路实现控制的,但该控制方法并不适用于电梯电机控制这种运行中的动态系统。因此,对于高性能的动态调速系统,需要建立在永磁同步电动机的动态模型之上,为解决这一难题,FOC控制方法由此而来。
FOC控制方法是一种利用变频器实现控制三相交流电机的技术。该方法通过调整变频器的输出频率、输出电压的大小及角度,实现对电机输出的控制。其主要特性类似于他激式直流电机,可以分别控制电机的磁场及转矩。由于在控制运算处理时会将三相输出电流及电压以矢量来表示,因此称为矢量控制。矢量控制技术是现在电梯电机驱动领域主要采用的控制技术,技术已经比较成熟。
DTC控制方法是继矢量控制方法之后发展起来的又一种高动态性能的交流电动机变压变频调试方法。永磁同步电动机的DTC控制方法是基于异步电动机DCT控制基础之上,逐步推广到弱磁控制和同步电动机控制中的。直接转矩控制与矢量控制技术相比,不需要旋转坐标系变换,也不需要对定子电流的磁场分量和转矩分量进行闭环控制,同时也不需要脉宽调制单元,但该控制技术稳态转矩脉动较大[4],暂时不适用于电梯转矩平稳度要求较高的电梯主机控制领域,但若突破这一难题后,DTC控制技术将是电梯领域永磁同步主机控制技术的未来发展方向。
2 永磁同步电动机矢量控制方法
基于上述对永磁同步电动机控制方法的简述,本文对常用的矢量控制方法进一步研究。为简化数学模型,排除永磁同步电动机凸极作用造成的转子耦合电感的变化对模型的影响,利用坐标变换将永磁同步电动机的在三相静止坐标下复杂的非线性方程数学模型转化为旋转坐标系下的线性方程。
已知永磁同步电动机的转子磁链ψr是由永磁体决定的恒定不变量,因此无须像异步电机那样估算转子磁链,可通过检测转子位置信息将两相旋转坐标系的d轴定于转子磁链ψr方向上。为实现对永磁同步电动机的转速控制,则需要通过对电磁转矩Te的控制来实现。综上,通过Clarke变换将三相电机的数学模型等效为两相电机,再将静止坐标系下的两相电机模型变换为旋转坐标系下。可得永磁同步电机的数学模型如下:
电压方程见式(1)。

转矩方程见式(2)。

式中:
Rs——定子绕组电阻;
p——微分算子;
ud——定子电压的d轴分量;
uq——定子电压的q轴分量;
id——定子电流的d轴分量;
iq——定子电流的q轴分量;
Ld——定子线圈的d轴自感;
Lq——定子线圈的q轴自感;
ωr——电机同步速;
np——电动机极对数;
Te1——永磁转矩;
Te2——磁阻转矩。
从式(2)中可以看出永磁同步电动机转矩分量有2个,分别为永磁体磁链ψr与定子电流转矩分量iq作用后产生的永磁转矩Te1和转子的凸极结构造成的定子电流励磁分量id与转矩分量iq产生的磁阻转矩Te2。见式(3)。
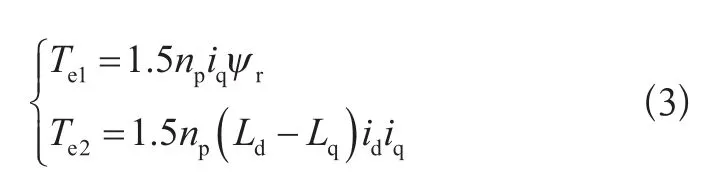
从式(3)可得,永磁转矩Te1和磁阻转矩Te2都与定子电流转矩分量iq成正比例关系,因此可通过调节和控制定子电流转矩分量iq来控制电机的转矩。根据上述永磁同步电机数学模型可得永磁同步电机内部结构图如图2所示。

图2 永磁同步电机内部结构图
目前,永磁同步电动机矢量控制系统主要采用的控制系统结构如图3所示。该系统利用转速外环中的速度自动调节器(ASR)提供iq需要的指令值,同时根据电动机的弱磁程度提供id需要的指令值。最简单的控制方案则是当电动机在基频以下恒转矩区运行时,将id的指令值设定为0。[5-6]而在恒功率区运行时,此时需要进行弱磁调速,则令id小于0,起到去磁作用。但对于电梯驱动主机这类常规的正弦波永磁同步电动机很少运行在弱磁区,因此可忽略不计。

图3 永磁同步电动机矢量控制系统结构框图
利用MATLAB/Simpowersystems中的永磁同步电动机矢量控制示例,建立上述永磁同步电动机矢量控制模型,可通过仿真获得永磁同步电动机矢量控制系统仿真结果[7],如图4所示。从图4中可见a相电流、电机转速、电磁转矩、直流电压的仿真波形图。

图4 永磁同步电动机矢量控制系统仿真结果图
该仿真设定电源电压为380 V,频率为50 Hz的交流三相电源,并在恒转速期间加入突变外加转矩,观察电磁转矩、电流及转速的波动情况,可通过仿真结果图看出,在永磁同步电动机矢量控制系统下,面对转矩突变情况时该系统能够很好地解决转速波动问题,电机的电磁转矩和对应的电流值的相应变化也没有很高的延迟,控制性能优越。
3 永磁同步电动机无感控制方法前瞻
在实际应用过程中,永磁同步电动机的闭环控制系统为精确得到电机的转子位置信息和电机运行速度信息,主要采用在电机的转子轴上安装高精度的传感器。电梯行业中常采用的传感器主要为光电编码器来检测电机的转子位置信息和电机转速。由于加装的高精度传感器价格昂贵,甚至部分特殊要求的高精度传感器价格超过了电动机的价格。并且加装传感器,需要增设传感器与转子轴的机械连接机构,并且增加传感器与控制器之间的通讯连线。但为获得传感器精确的信号,必须严格保证传感器与转子轴机械结构的安装精度和通讯连线传输信号的有效干扰屏蔽。因此,这些特殊要求都增加了电机的体积和生产成本。再有,传感器受外界温度、湿度、振动等的影响也会造成控制器控制精度的下降。为解决上述问题,提高电梯乘坐安全,降低电梯故障率,降低电梯的生产成本,拓宽电动机适用场合,优化电梯动力系统,无位置传感器的永磁同步电动机控制技术已经成为未来电梯主机调速控制领域前沿技术之一。
所谓无位置传感器控制技术,主要利用采集电动机绕组的电压、电流信号,并利用适当的算法求解估算出转子的速度信息和位置信息,从而达到取代外置传感器实现电动机闭环控制的目的。通过近些年国内外众多学者的研究,提出的无感控制技术的估算方法有:
1)利用定子端电压和电流直接计算转子的速度和位置。[8]该方法计算转子位置信息和转子转速需要的数据均可通过测量获得,因此数据采样相对简单。同时,该方法计算过程少,计算过程直接,相比其他估算方法不需要复杂的收敛控制算法,并且动态响应的速度也相对较快。但该方法的缺点是:采用电流的微分计算,易造成测量误差引起的计算结果与实际数据的偏差增大,并且该方法采用开环计算,在电机运行过程中当干扰造成参数变化时,无法有效确保计算数据信息结果的准确性。基于PMSM在两相静止坐标系的数学模型经计算可得出式(4)和式(5)。
当电动机处于静止时的转子位置信息用式(4)表示。

同步角速度估算值用式(5)表示。

因此,可通过上述式(4)和式(5)计算获得永磁同步电动机的转子初始位置信息和转速信息,实现无感控制。
2)模型参考适应方法(MRAS)。[9-11]该方法由S.Tamai在交流电动机调速领域中首先提出。该方法需通过建立不含待观测变量的参考模型和含有待观测变量的可调模型,输出同一个变量值进行差值比较,并对可调变量进行快速反应调节。模型参考自适应方法(MRAS)的PMSM矢量控制系统框图如图5所示。MRAS方法的优点是实现了电动机的无感闭环控制,控制调节反应迅速。缺点是该方法对参考模型建立的准确性和自适应算法参数的选取要求很高,原因是缺乏对测量误差和系统噪声等不确定因素的校正机制。倘若建立的模型不够准确或参数设定的不够优化,会直接影响系统对速度的辨识和电动机动态变化时的控制效果。若为了建立更为准确的参考模型,则模型结构和算法会更加复杂,加重微控制器的计算负担,降低系统反应速度。
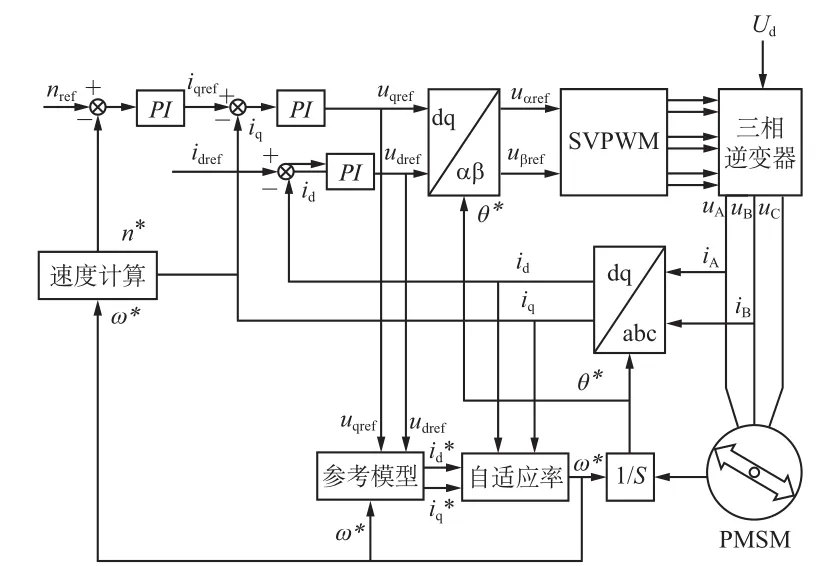
图5 模型参考自适应方法(MRAS)的PMSM矢量控制系统框图
3)扩展的卡尔曼滤波器(EKF)。扩展的卡尔曼滤波器[12-13]由维纳滤波发展而来,与其他控制方法比较,它采用状态方程来描述控制对象,更加适用于计算机处理和计算,简化了系统描述。作为一种在非线性系统中最小方差意义上的最优预测估计方法,扩展的卡尔曼滤波器有效地削弱了随机干扰和测量噪声的影响。卡尔曼滤波是一种数据处理的递推算法,其滤波过程如图6所示。图中的滤波回路可估算并校正状态变量,增益计算回路可对方差矩阵和增益矩阵进行更新操作。当在不明确控制系统初始状态情况下,该方法通过滤波迭代计算可逐渐消除初始值选定不优化的影响,最终实现滤波无偏。
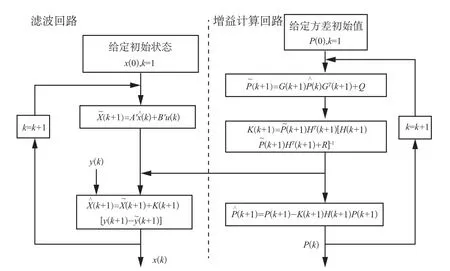
图6 卡尔曼滤波过程图
将卡尔曼滤波过程公式应用于永磁同步电动机无位置传感器控制算法中,可建立如下系统框图,如图7所示。

图7 基于EKF算法的PMSM矢量控制系统框图
4 总结
由上述综述可知电梯驱动主机中的永磁同步电动机控制技术的发展与前沿,其中矢量控制技术已经成为永磁同步电动机控制技术的主流方法,而为进一步优化控制技术衍生出的直接转矩控制(DTC)将是永磁同步主机控制技术的未来发展方向。同时为降低永磁同步曳引机制造成本,降低因外界环境影响下的故障率,拓宽其应用范围,永磁同步电动机的无感控制方法将成为未来永磁同步电动机的研究重点,具有很高的经济和实用价值。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
电力工程技术(2014年1期)2014-03-20
