基于神经网络的铁路通信网络传输延迟控制方法
2023-02-18 02:04董玉圻
铁路通信信号工程技术 2023年1期
董玉圻
(国家铁路局装备技术中心,北京 100702)
1 概述
经过几代人不懈地努力,国内铁路建设已经发展得较为成熟[1],中国已成为世界上铁路运输行业较为发达的国家。通信网络是现代化铁路运输的关键,可以说是列车的“心脏”。铁路列车在运行过程中通过通信网络及时将信息传递给中央控制室,中央控制室再根据这些信息对列车进行牵引、制动[2]。通信网络在进行信息传输时,受到各种因素的影响,不可避免地会出现延迟的情况。网络延迟对于铁路通信质量有很严重的影响,一旦延迟过大,将严重损害铁路运输的安全性和可靠性[3]。面对这种情况,有必要进行铁路通信网络传输延迟控制。
耿文凤[4]提出了一种基于功率控制协议的延迟控制方法,该方法通过自适应调整数据包传输功率来降低传输延迟,提高传输效率。张友鹏[5]等人为解决铁路时间同步网中上/下行链路延迟不一致的情况,利用改进实时计算数据包排队延迟算法来实现对传输延迟的补偿设计。该方法以铁路时间同步网时钟模型为基础,然后通过计算线性时钟频差的方式改进数据包排队延迟算法,在求解出排队延迟最小数据包后,估算排队延迟并将其导入到时钟模型中,得到新的时钟偏差估计方式,以此为依据制定补偿方案,可以实现对延迟量的控制。
前人研究虽然在一定程度上取得了延迟控制目的,但是延迟控制一般缺乏全面的参考,使时延与实际情况总是存在较大差距。面对这种情况,研究一种基于神经网络的铁路通信网络传输延迟控制方法(简称控制方法)。通过该研究以期提高铁路通信网络传输信息效率。
2 铁路通信网络传输延迟控制模型设计
通信网络在铁路运营方面起到重要的作用,关系到铁路的启停、调度等。一旦通信网络出现严重延迟,信息传递就会受到影响,耽误了指令的执行,影响铁路运营的安全性和稳定性[6]。面对这种情况,研究一种铁路通信网络传输延迟控制方法。该方法分为3 部分,即通信网络传输延迟数据采集、通信网络传输延迟预测以及通信网络传输延迟控制。下面针对这3 个方面进行具体分析。
2.1 通信网络传输延迟数据采集
铁路通信网络传输延迟一般由4 部分组成,由此构建出通信网络传输时延模型[7]。模型表达式如公式(1)所示。

公式(1)中,T代表通信网络传输总时延;t1、t2、t3、t4分别代表发送、传播、处理、排队等4 个部分的延迟。
在通信网络传输时延预测中,需要以延迟数据为基础,因此利用TCN 网络分析仪抓取的通信网络延迟数据,具体过程如图1 所示。

图1 通信网络延迟数据采集流程Fig.1 Flowchart of delay data acquisition in a communication network
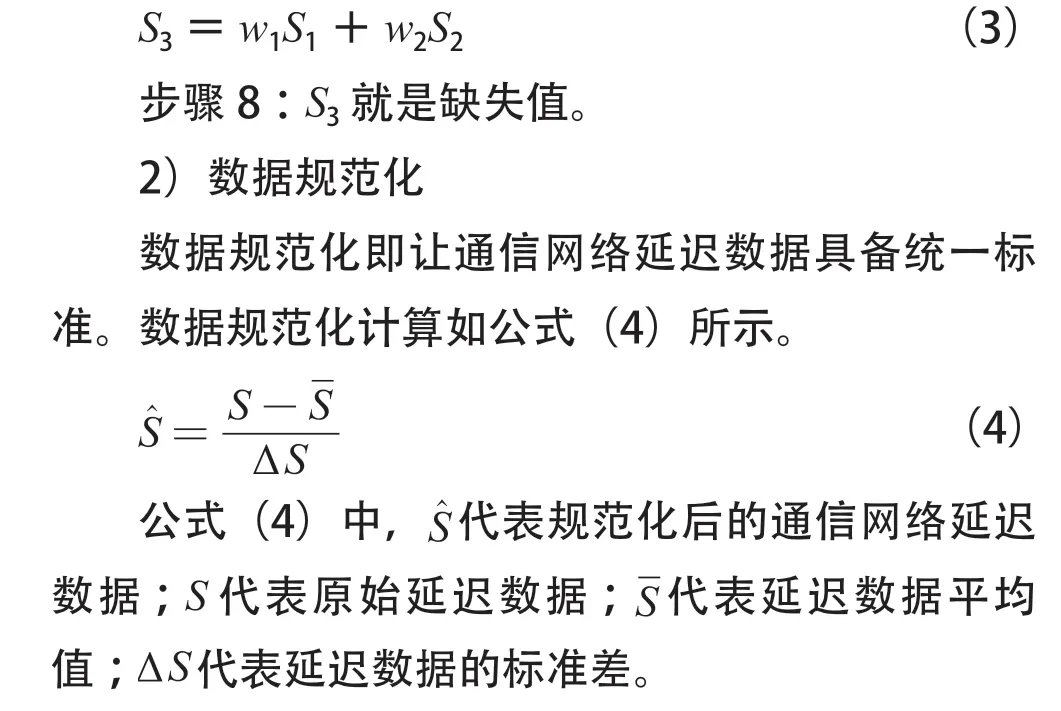
在完成通信延迟数据采集之后,为保证数据样本的完整性和全面性,需要对延迟数据进行缺失填补和规范化处理[8]。
1)缺失数据填补
通信延迟数据在采集过程中受到采集设备以及采集环境的影响,会存在个别缺失的情况,为此需要进行缺失数据填补[9]。具体过程如下。
步骤1:通过历史数据计算历史通信延迟数据之间的相关因子R。
步骤2:列出缺失序列。
步骤3:利用时间序列法得到拟合值,记为S1。
步骤4:找到与缺失序列相关性最高维度的时序数列。
步骤5:利用相关维度数据预测得到拟合值,记为S2。
步骤6:通过相关因子计算相关权重,计算如公式(2)所示。

公式(2)中,w1、w2代表S1、S2对应的权重。
步骤7:通过权重计算最终拟合值,记为S3,如公式(3)所示。
基于上述采集并整理好的通信网络传输延迟数据组成研究样本。
2.2 基于神经网络的通信网络传输延迟预测
随着时间的推移,传输延迟会逐渐累积,导致延迟越来越严重[10]。为实现对下一刻延迟的控制,事先明确当前时刻通信网络传输延迟十分重要。为此,利用神经网络预测通信网络传输延迟。预测过程以采集到的通信网络传输延迟数据样本为输入,得出预测值[11]。预测过程分为两部分,分别为前期的神经网络模型训练和后期的预测测试。通过训练可以建立成熟的预测模型,具体过程如下。
步骤1:初始化,确定神经网络结构参数、最大允许误差以及学习速率。
步骤2:为基于神经网络的预测模型随机赋予权值和阈值。
步骤3:将通信网络传输延迟数据训练样本P={p1,p2…pm}和期望输出Q={q1,q2,…,qn}输入到神经网络当中。
步骤4:计算隐含层输出。计算如公式(5)所示。

公式(5)中,ηj(l)代表第l层隐含层第j个神经元的输出;wij代表输入层和隐含层之间的连接权值;gj(l)代表第l层隐含层第j个神经元输入的通信网络传输延迟数据样本;bij代表隐含层与输入层连接阈值;nl代表第l层隐含层神经元数量;l代表层编号;f代表激励函数[12]。
步骤5:计算输出层输出,如公式(6)所示。

公式(6)中,μk(l)代表第l层输出层第k个神经元的输出;wjk代表隐含层和输出层之间的连接权值;bjk代表隐含层与输入层连接阈值;ml代表第l层输出层神经元数量。
步 骤6:计 算μ={μ1,μ2…μn}和Q={q1,q2…qn}之间的误差,如公式(7)所示。

公式(7)中,c代表误差;μi代表第i个输出层神经元的实际输出。
步骤7:判断误差c是否小于设定的最大允许误差,若是,终止训练程序,完成基于神经网络的通信网络传输延迟预测模型的训练;否则,更新权值和阈值[13]。
步骤8:通过训练完成的预测模型实现传输延迟预测。
基于上述流程完成基于神经网络的通信网络传输延迟预测。
2.3 通信网络传输延迟控制
基于上述研究基础,结合PID 控制器实现通信网络传输延迟控制[14]。控制模型如图2 所示。该控制模型应用过程如下。
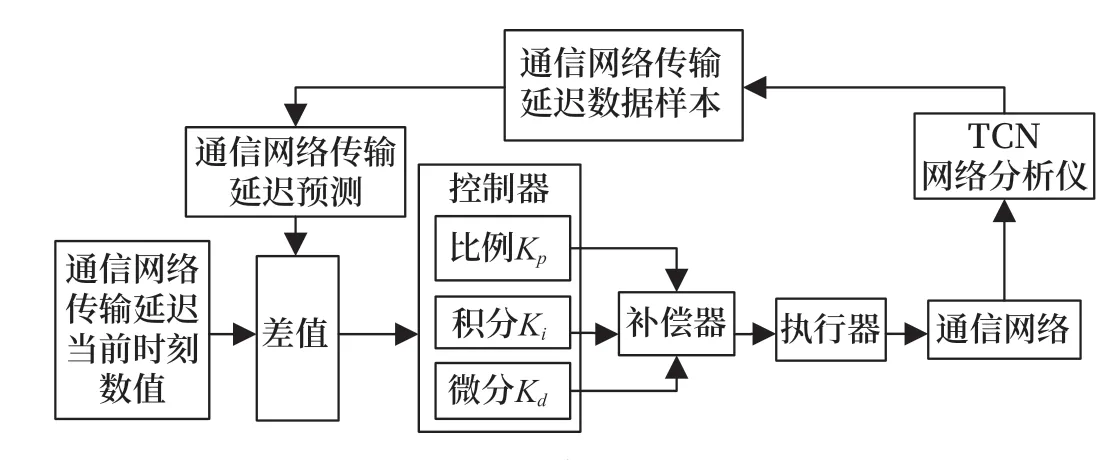
图2 通信网络传输延迟控制Fig.2 Transmission delay control in the communication network
步骤1:输入基于神经网络预测的通信网络传输延迟数值。
步骤2:计算当前时刻与预测时刻之间的延迟差值,计算如公式(8)所示。

公式(8)中,ΔH代表延迟差值;H(t)代表t时刻的通信网络传输延迟数值;H(t+1)代表t+1 时刻的通信网络传输延迟数值,也就是预测出的下一刻的传输延迟数值。
步骤3:将ΔH输入到PID 控制当中,通过3个子控制器计算通信网络控制量,计算如公式(9)所示。

由此得出总控制量计算的公式,如公式(10)所示。

公式(9)、(10)中,y(t)代表t时刻的延迟控制量;Kp代表比例系数;G1(t)、G2(t)、G3(t)代表t时刻Kp、Ki、Kd等3 个子控制器的输出;Ti代表积分时间常数;Td代表微分时间常数。
步骤4:基于控制量,输入到延迟补偿器当中,实现铁路通信网络传输延迟控制[15]。延迟补偿器模型如公式(11)所示。

公式(11)中,F(t)代表延迟补偿器模型;ψ代表延迟补偿系数;k代表通信信号衰减因子;Δt代表铁路通信网络传输间隔;L代表数据包传输队列长度[16]。
经过上述过程,完成基于神经网络的铁路通信网络传输延迟控制研究。
3 控制方法应用测试
为测试控制方法在铁路通信网络传输延迟控制中的应用效果,以基于功率控制协议的控制方法、基于延迟补偿的控制方法为对比项,进行实例测试。
3.1 通信网络传输延迟数据样本
基于TCN 网络分析仪采集铁路通信网络传输延迟数据,并组成数据训练和测试样本。其中部分样本如表1 所示。

表1 部分通信网络传输延迟数据样本Tab.1 Samples of transmission delay data in the communication network
3.2 基于神经网络的传输延迟模型训练
神经网络预测模型的初始参数如下:神经网络结构参数为4/36/1;最大允许误差为0.001;学习速率为0.25;各层连接为0.14、0.32;各层连接阈值为0.036、0.44;最大迭代次数为100。在上述初始参数设置下,结合表1 训练样本,进行基于神经网络的传输延迟预测模型训练。结果如图3 所示。
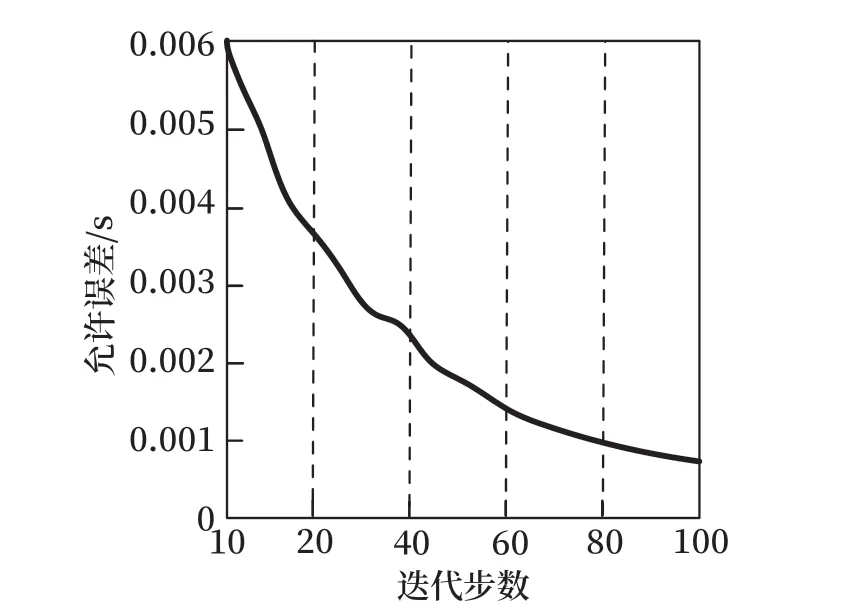
图3 基于神经网络的传输延迟预测模型训练Fig.3 Training of the model of predicting transmission delays based on a neural network
从图3 中可以看出,在迭代步数为86 时,基于神经网络的传输延迟预测模型的误差小于0.001,完成训练,可以用于实际延迟控制中。
3.3 延迟控制结果
基于2.3 节的研究,计算通信网络传输延迟控制量和延迟补偿量,结果如图4 所示。
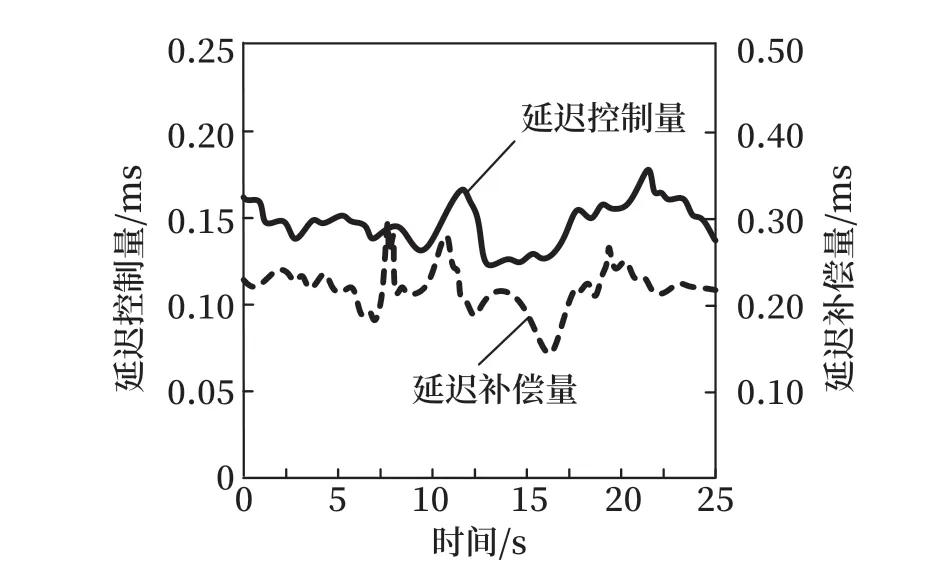
图4 通信网络传输延迟控制量和延迟补偿量Fig.4 Delay control quantity and delay compensation quantity for transmission in the communication network
3.4 延迟控制结果
在相同测试条件下,利用基于功率控制协议的控制方法、基于延迟补偿的控制方法进行传输控制,然后对比控制结果,即延迟时间以及通信链路速率,以此判断控制方法性能。结果如图5、6 所示。

图5 延迟时间Fig.5 Delay time
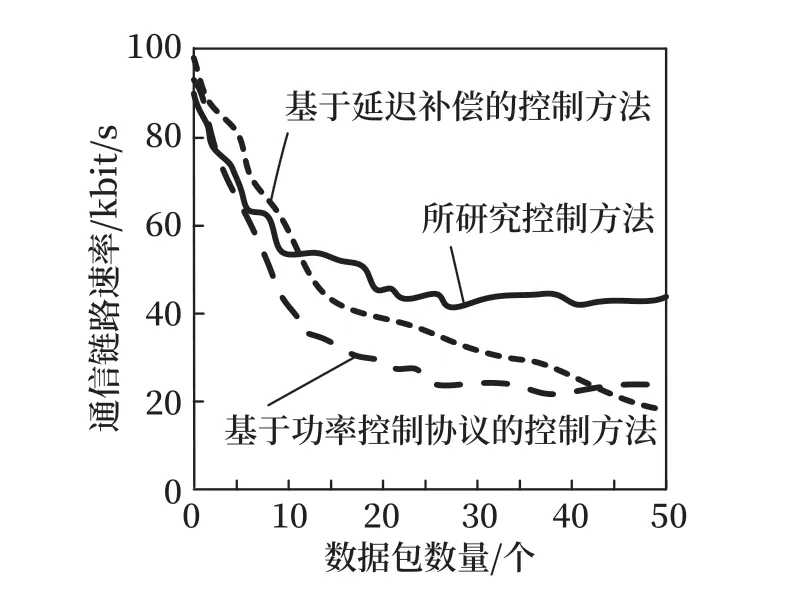
图6 通信链路速率Fig.6 Communication link rate
从图5、6 中可以看出,与基于功率控制协议的控制方法、基于延迟补偿的控制方法相比,控制方法应用后,延迟时间更短,通信链路速率更高,由此证明了控制方法的有效性。
4 结束语
提出一种基于神经网络的铁路通信网络传输延迟控制方法,控制方法通过神经网络进行延迟预测,通过预测结果得出延迟控制量和延迟补偿量,实现传输延迟控制。最后,通过实例证明应用控制方法,传输延迟时间有所缩短,通信链路速率提高,证明了控制方法的有效性。然而,本研究仍有需要改进的地方,即控制方法并没有将延迟丢包问题考虑在内,还需要进一步扩展和深入。
猜你喜欢
新高考·高二数学(2022年3期)2022-04-29
新高考·高二数学(2022年3期)2022-04-29
上海人大月刊(2022年4期)2022-04-14
作文通讯·初中版(2022年2期)2022-02-05
中学生数理化(高中版.高二数学)(2020年11期)2020-12-14
人大建设(2020年5期)2020-09-25
人大建设(2020年5期)2020-09-25
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
中学生数理化·高一版(2018年6期)2018-07-09