基于最小二乘法和支持向量机的海洋内孤立波传播速度反演模型*
2023-02-18 06:38:48梁可达刘滕飞常哲张猛李志鑫黄松松王晶
物理学报 2023年2期
梁可达 刘滕飞 常哲 张猛 李志鑫 黄松松 王晶
(中国海洋大学物理与光电工程学院,青岛 266100)
传播速度是内孤立波的重要参数之一,如何通过光学遥感图像准确快速地获得内孤立波速度是目前需要解决的重要科学问题.本文在实验室建立了模拟内孤立波光学遥感成像系统,开展了系列综合实验,获取实验数据库,并利用最小二乘法和支持向量机两种方法分别建立基于单景光学遥感图像的内孤立波速度反演模型.利用中国南海的MODIS 图像和GF-4 图像数据对速度反演模型进行精度检验.研究结果表明: 最小二乘法内孤立波速度反演模型能够给出回归方程,物理意义更为直观,且在300—399 m 水深范围精度更高,而支持向量机内孤立波速度反演模型在水深400—1200 m 和83—299 m 的范围内精度高.因此两种内孤立波速度反演模型各有优势,都可以应用于真实海洋中内孤立波速度的反演.
1 引言
海洋内波是指在海水稳定层化的海洋中产生的、最大振幅出现在海洋内部的波动,是一种常见的海洋现象[1].海洋内孤立波是周期短的非线性内波,具有传播的单向性和波形的不变性等特点[2].海洋内孤立波会对海上石油、天然气等资源的勘探以及开采设施的安全构成破坏,也会改变水下声信号传播路线,对潜艇航行产生影响等等[3−6].同时海洋内孤立波会影响海洋表面温度的变化[7],对海洋的生态环境具有重要影响[8].因此,研究内孤立波特性具有重要的科学意义和良好的应用前景.
目前研究内孤立波的方法有很多,其中利用卫星遥感图像是研究内孤立波的重要方法之一[9,10].其中光学遥感具有时间、空间分辨率较高和图像丰富等优点,常被学者用来研究内孤立波的时空分布及传播特性[11−13].海洋内孤立波的特征参量主要包括半宽、振幅和速度等,这些参量的大小决定了内孤立波在海洋混合中的作用量级,因此遥感图像反演内孤立波参数引起了研究人员的关注.而内孤立波的速度作为重要的传播特性,一直以来也被许多学者利用不同手段开展研究.目前测量内孤立波传播速度的常用方法主要是通过现场实测或利用遥感图像计算内孤立波速度.现场实测可以通过两个或多个系泊装置观测内孤立波计算传播速度,该方法难度大、费用昂贵.Alford[14]等利用2007 年的系泊数据研究了中国南海的非线性内波的速度和演化.Huang 等[15]利用水下系泊阵列进行了“南海内波实验”.报道了2013 年12 月4 日的一次极端内孤立波,其最大振幅为240 m,并对传播速度进行了分析.此外,吕海滨等[16]利用 2009 年 6 月24 日 15 时 40 分至 25 日 16 时 40 分“科学一号”考察船在东沙岛东北部陆架上K106 站进行的长达 25 h 的 X 波段雷达、温度链、声学多普勒流速剖面仪同步观测,在该海域利用 Radon 变换技术获取了本次观测到的内孤立波的传播速度.虽然现场实测可以测量内孤立波平均速度,但大规模大范围的测量难于实现.
遥感观测手段测量内孤立波速度主要是利用多时间图像法,即采用同一天不同时刻的包含同一内孤立波的遥感图像,利用传播路程与传播时间的比值估算内孤立波的传播速度.Hong 等[17]利用卫星数据估算南海浅水区内孤立波相速度,基于环境卫星高级合成孔径雷达(ASAR)和中分辨率成像光谱仪(MODIS)在很短的时间间隔获得不同的位置图像,进行内孤立波速度计算.Meetei 等[18]利用2002 年12 月 至2016 年5 月 的ERS2 和Envi Sat 卫星的不同图像对和MODIS 的光学图像,以及可见红外成像辐射计来调查和估计安达曼海内孤立波的传播速度.Sun 等[19]利用MODIS Terra/Aqua 卫星2014 年1 月至2018 年12 月采集的195对影像对估算安达曼海内孤立波传播速度.多时间图像法计算内孤立波速度相比现场实测手段更加便捷,但很难获取某一海域任意时刻的两景包含同一内孤立波的光学遥感图像,且该方法计算的速度为内孤立波平均速度,这些都是该方法的不足之处.然而,发展一种只用单景图像反演内孤立波速度的方法显然是非常重要的.
本文通过实验模拟光学遥感内孤立波成像,获得了大量实验数据,采用最小二乘法和支持向量回归两种方法建立利用单景光学遥感图像反演内孤立波速度的模型,为内孤立波速度的研究和获取提供了新方法.无疑,这对于海洋内孤立波传播特性的研究起到了推动作用.
2 实验设计及数据处理
2.1 实验设计
实验在长宽高分别为5 m×0.8 m×0.35 m 三维长直水槽中进行.为模拟海洋中的层结现象,根据流体力学相似性原理,在水槽中铺设上下两层水体,下层水体模拟高盐度海水,上层水体模拟低盐度海水.长直水槽为玻璃材质,可从水槽侧面观测水体内部的内孤立波演化过程,从而获取内孤立波的半波宽度、振幅和速度等参数.为了仿真光学遥感成像,将水槽中的水体表面视为海表面,在水槽一端上方放置LED 面光源,调整好角度,发出白光模拟太阳光;在水槽另一端上方放置CCD1,模拟卫星的可见光传感器,LED 光源发出的光照射到水体表面,经反射后在CCD1 形成仿真光学遥感内孤立波图像;在水槽侧面放置CCD2,与上下层水体的分层位置等高,用来采集记录内孤立波图像,获取内孤立波特征参量.两台CCD 的视场边界相同,并连接一台电脑同步采集图像,获得了内孤立波一一对应的仿真光学遥感图像和波形图像,光学遥感图像参数与内孤立波特征参数完全匹配[20].实验平台结构如图1 所示.

图1 内孤立波光学遥感仿真平台结构示意图Fig.1.Schematic diagram of simulation platform of the internal solitary wave optical remote sensing.
实验采用重力塌陷法制造内孤立波,即靠近水槽一侧用挡板隔开的区域为造波区,可以通过控制在造波区加入或抽取上层水体的多少来控制塌陷高度,获得内孤立波不同大小的振幅.针对不同水文参数和层结的海洋,根据流体力学相似性原理设计了不同水深、不同层结、不同密度差和不同塌陷高度的系列实验,如表1 所列.

表1 内孤立波实验设计表Table 1.Design table of internal solitary wave experiment.
2.2 数据处理
在采集的图像中选取不同位置做时间序列图,CCD1 采集图像的时间序列图模拟了光学遥感图像,可从中提取亮暗间距和灰度差等遥感图像特征参量.CCD2 采集图像的时间序列图可提取内孤立波传播速度、半波宽度和振幅等波要素参量.在提取同一组实验的参数时,根据标尺选取表面与侧面图像相对应的取样线,利用MATLAB 程序做时间序列图,如图2 所示.图2(a)为内孤立波仿真光学遥感图像,图2(b)为内孤立波波形图,可提取内孤立波振幅、半波宽度等参数,图2(c)为内孤立波仿真光学遥感图像灰度剖面图,可提取灰度差和亮暗间距等遥感图像参数.
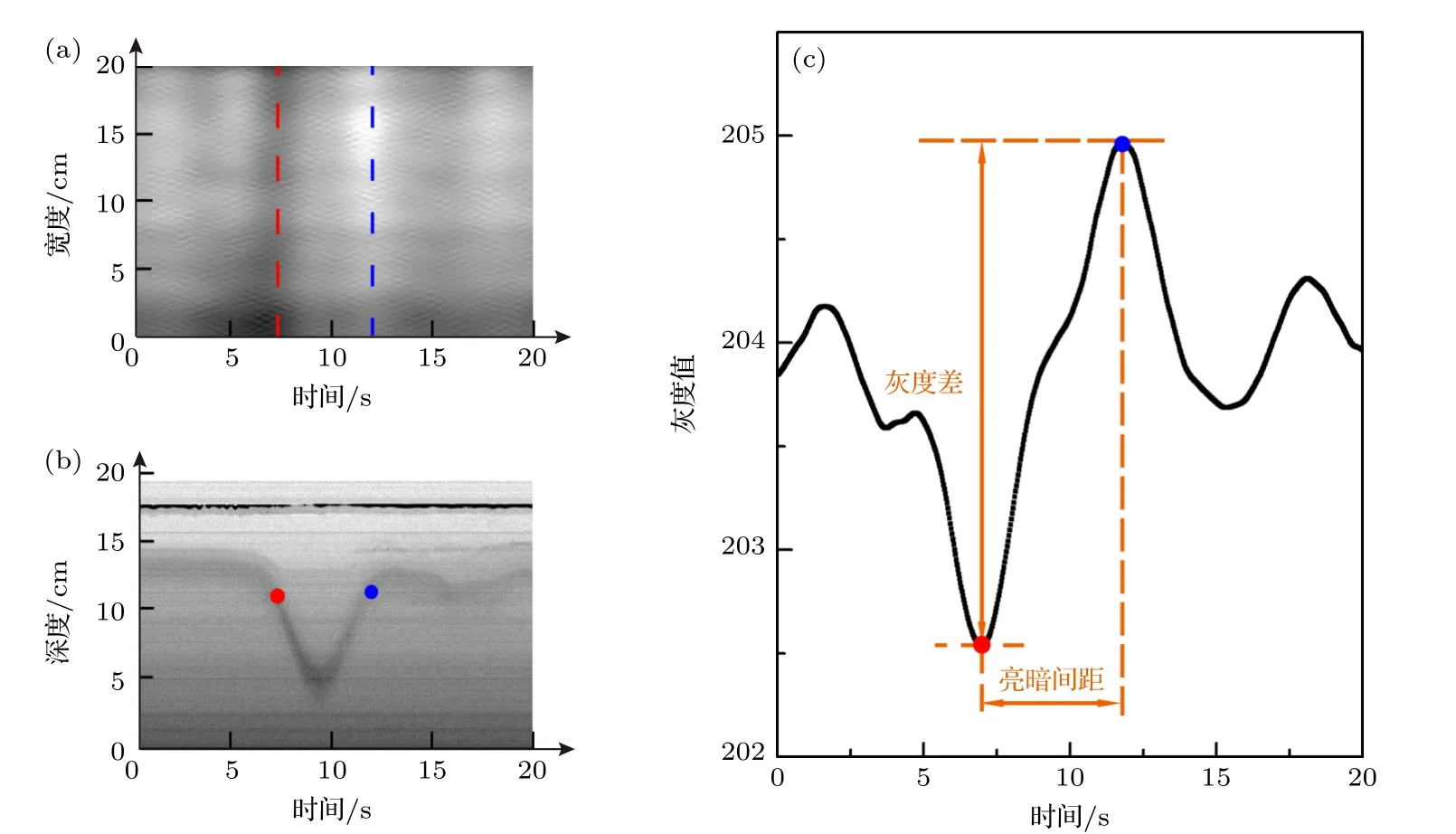
图2 实验室内孤立波参数示意图 (a) 内孤立波仿真遥感图像;(b)内孤立波波形图;(c)内孤立波灰度剖面图Fig.2.Schematic diagram of the internal solitary wave parameters in the laboratory: (a) Simulated remote sensing images;(b) the internal solitary wave waveform diagram;(c) the gray scale profiles.
在实验中共提取1440 组实验数据,每组实验数据包括上下层水深、上下层密度、振幅、速度、半波宽度、亮暗间距、灰度差等参数.对获得的1440 条实验数据进行无量纲化处理,无量纲参量定义如下:
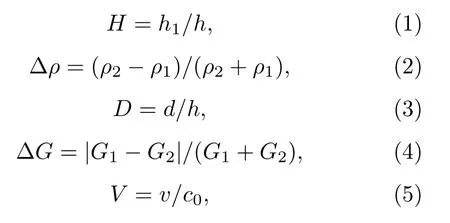
h1,h分别为水槽实验的上层水深和总水深,ρ1,ρ2分别为上层和下层水的密度,d,G1,G2分别为仿真遥感图像内孤立波条纹的亮暗间距、灰度最大值和灰度最小值,v为内孤立波传播速度,c0为线性相速度.建立了无量纲化的实验室内孤立波数据样本库,利用样本库中的数据进行内孤立波速度反演模型的训练.
3 内孤立波速度反演模型
从经典的KdV 理论模型中可知内孤立波传播速度与水深、层结、密度差和振幅相关,对于海洋内孤立波的振幅可以通过现场实测和光学遥感图像反演模型获取,Wang 等[21]利用内孤立波光学遥感图像中条纹的灰度差和亮暗间距以及其他海洋水文参数反演了内孤立波振幅.而本文是利用光学遥感图像来进行内孤立波速度的反演,所以输入参量中包含了与内孤立波振幅相关的光学遥感图像特征参量亮暗间距和灰度差,以这两项遥感图像参数反映内孤立波振幅的作用.因此建立内孤立波速度反演模型时将水深、水体分层结构、密度差和遥感图像的亮暗间距、灰度差作为速度反演模型的自变量.下文分别利用最小二乘法和机器学习两种技术建立内孤立波速度反演模型.
3.1 最小二乘法的内孤立波速度反演模型
最小二乘法是解决曲线拟合的常用方法,其原理是寻找最小化的误差平方和来确定与数据对应的最佳匹配函数,进而可以直观表达因变量与自变量的函数关系,物理意义也就一目了然,所以最小二乘法在多个领域研究中被广泛地应用.本文利用所获得的大量内孤立波实验数据,采用最小二乘法寻找最佳的回归方程,建立基于最小二乘法的反演内孤立波速度模型.将无量纲数据库中的H,△ρ,D,△G作为模型自变量,将V作为因变量.考虑到4 个自变量是相互独立的,所以在回归方程中将其作为独立项进行拟合.由KdV 方程等理论可知速度与自变量具有非线性关系,回归方程中应包含有自变量的高次方项.因此通过最小二乘法拟合的二次回归方程和三次回归方程如下:
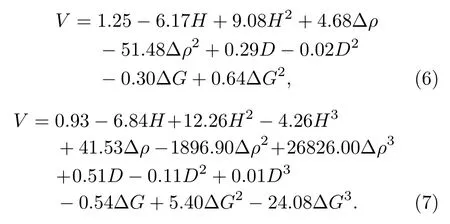
用实验数据检验回归方程反演值的结果如图3 所示,图3(a)为2 次方的回归方程的结果,方程反演值与实验值的相关系数为0.927,平均绝对误差为1.64 cm/s,平均相对误差为8.25%.图3(b)为最高次为3 次方的回归方程的结果,方程反演值与实验值的相关系数为0.928,平均绝对误差为1.61 cm/s,平均相对误差为8.13%.从图中可知,2 个回归方程都有效,它们的相关系数和误差大小接近,差异不大.
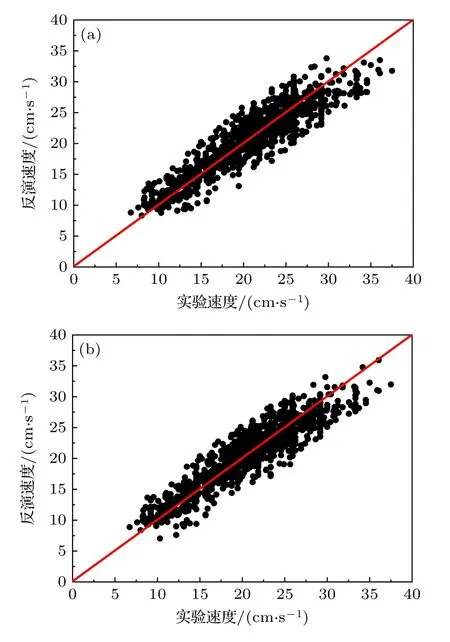
图3 最小二乘法回归方程反演结果散点图 (a)最高幂次为2 次方;(b)最高幂次为3 次方Fig.3.Scatter plot of the inversion results of the least squares regression equation: (a) With the highest power of 2;(b) with the highest power of 3.
3.2 支持向量回归内孤立波速度反演模型
支持向量机中的支持向量回归(support vector regression,SVR)是一种应用于函数回归预测领域的机器学习方法,SVR 相较于其他机器学习方法而言更适合于小样本的回归预测,且能够处理样本数据线性不可分的情况,所以本文采用SVR 的方法对内孤立波速度反演模型进行训练.选择局部性强且有将训练样本的特征空间从低维映射到无穷维性能的高斯径向基函数(radial basis function,RBF)作为模型核函数.
与最小二乘法相同,将无量纲数据库中的H,Δρ,D,ΔG作为模型输入参量,将V/C0作为输出参量.首先将所有数据输入SVR 程序中运行,去除误差较大的数据后,将剩余的1383 条样本数据随机排序,按照大致4∶1 的比例划分为模型训练集和测试集,训练集为1100 条样本数据,测试集为283 条样本数据.之后再次将数据输入SVR程序进行模型训练,得到模型后,记录模型的惩罚系数c和核函数参数g的值,c的值为1,g的值为16.图4 为SVR 内孤立波速度反演模型测试集实验数据与反演数据散点图,反演值与实验值的相关系数为0.888,平均绝对误差为2.10 cm/s,平均相对误差为10.28%,表明模型是有效的.
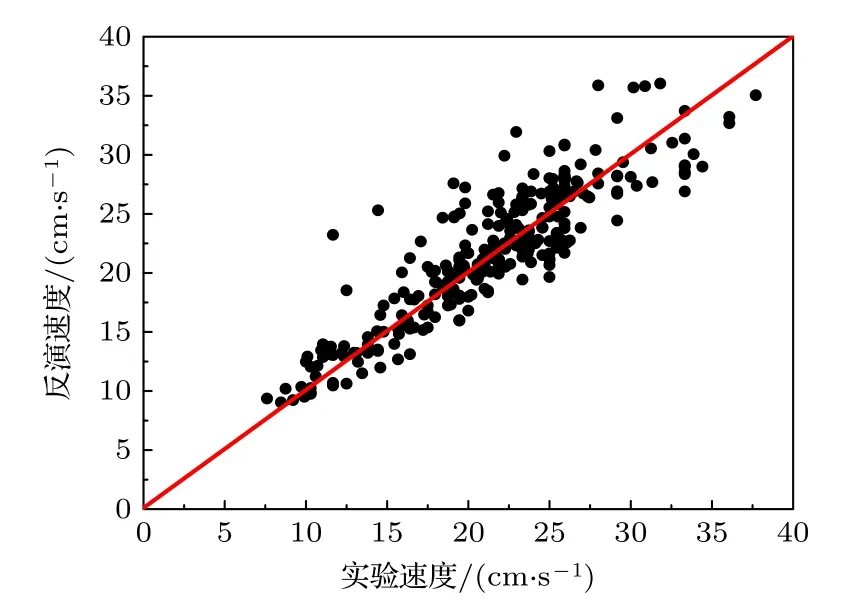
图4 SVR 内孤立波速度反演模型测试集散点图Fig.4.Scatter plot of test set of solitary wave speed inversion model in SVR.
4 结果与分析
4.1 光学遥感图像下载与处理
选取2021 年中国南海海域的遥感图像和数据来进行模型精度验证,在NASA 官方遥感影像数据下载网站LADDS DAAC 下载所需的MODIS遥感图像,在中国资源卫星应用中心下载高分4 号卫星光学遥感图像.对遥感图像进行筛选和处理,提取参数,对模型精度进行验证.
采用多时间图像法对内孤立波速度进行计算,从获得有内孤立波的遥感图像中选取同一天不同时刻的图像,找到同一个内孤立波,根据不同遥感图像中的内孤立波位置计算其传播距离,两景遥感图像的间隔时间为内孤立波的传播时间,传播距离与传播时间的比值就是传播速度.同时利用ENVI软件提取内孤立波的亮暗间距和灰度差等遥感图像参数.图5 为多时间图像法示意图.一般在采用多时间图像法计算内孤立波传播速度时两景图像的时间间隔约在1—3 h,时间间隔较短,所以将计算的平均速度近似作为两景遥感图像中内孤立波的传播速度.
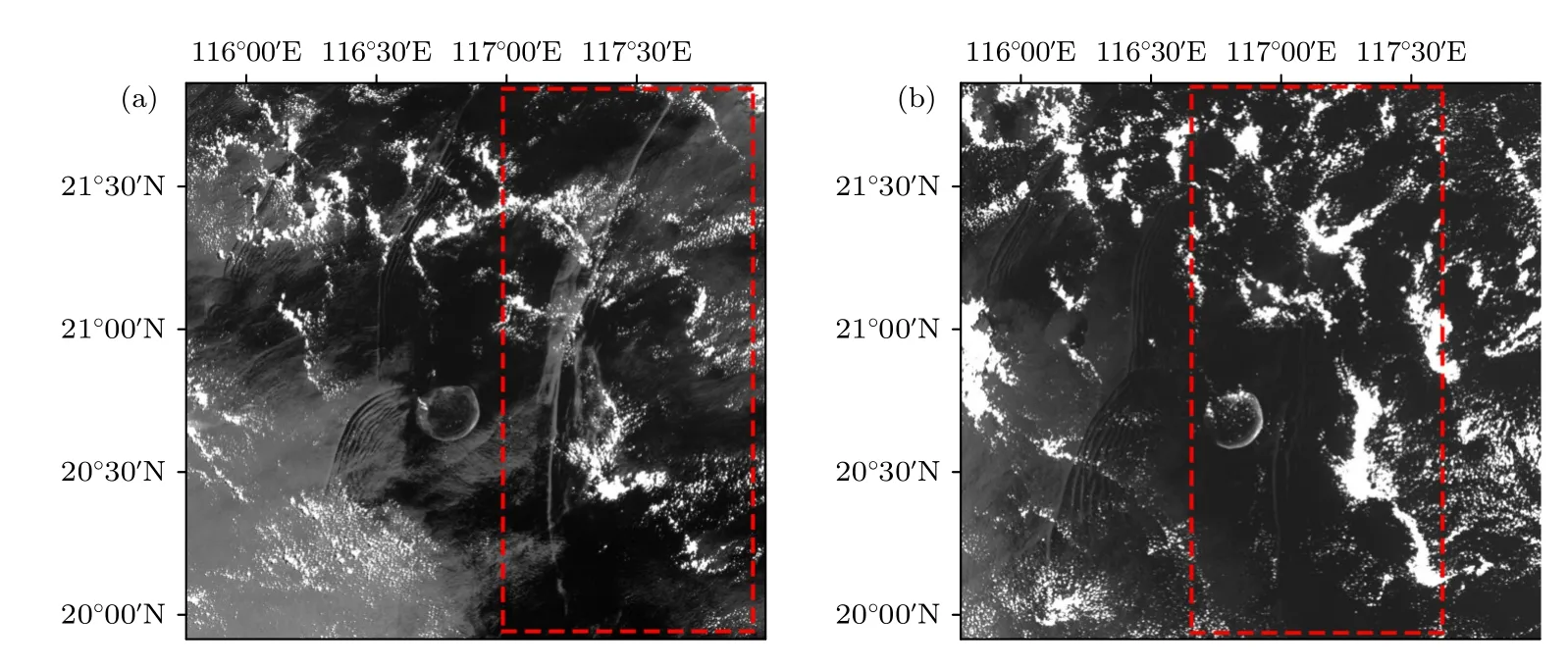
图5 多时间图像法示意图 (a) 2021年5月25日10:43南海海域GF4光学遥感图像;(b) 2021年5月25日13:40南海海域MODIS 光学遥感图像Fig.5.Schematic diagram of the multi-time image method: (a) An optical remote sensing image of GF-4 in the South China Sea at 10:43 on May 25,2021;(b) the MODIS optical remote sensing image of the South China Sea area is at 13:40 on May 25,2021.
从光学遥感图像中提取内孤立波条纹的亮暗间距和灰度差,对数据进行无量纲化处理,将输入参量代入反演模型,利用上述模型计算内孤立波速度.与多时间图像法计算出的内孤立波传播速度比较,验证模型精度.
4.2 模型精度验证
在利用最小二乘法内孤立波速度反演模型对遥感数据进行反演时,两种模型的反演值均小于实测值,存在系统偏差,如图6 中黑色散点所示.实验仿真与真实海洋的差异可能是导致验证时产生系统偏差的原因.为了消除系统偏差,对模型进行校正,使得系统偏差和其他误差最小,校正后的模型如下:

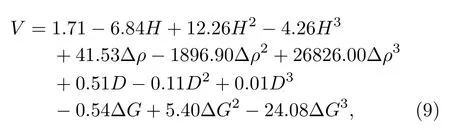
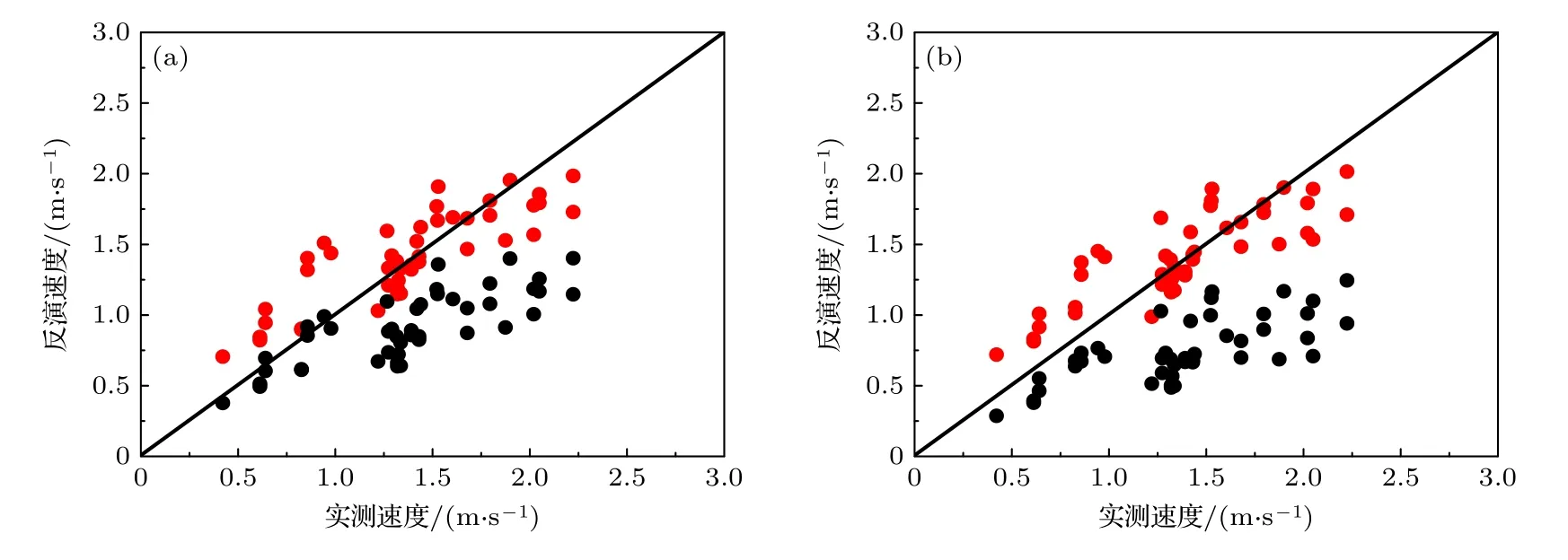
图6 最小二乘法内孤立波速度反演模型精度散点图 (a)校正前后最高幂次为2 次方的最小二乘法回归方程的反演结果散点图,黑色散点为校正前模型结果,红色散点为校正后模型结果;(b)校正前后最高幂次为3 次方的最小二乘法回归方程的反演结果散点图,黑色散点为校正前模型结果,红色散点为校正后模型结果.Fig.6.Scatter plot of the solitary wave speed inversion model accuracy within least squares.(a) The scatter plot of inversion results of least squares regression equation with the highest power of 2 before and after correction.The black scatters are the model results before correction,and the red scatters are the model results after correction.(b) The scatter plot of the inversion results of the least squares regression equation with the highest power of 3 before and after correction.The black scatters are the model results before correction,and the red scatters are the model results after correction.
(8)式为校正后的2 次方最小二乘法反演模型,常数项由1.25 校正为1.84,校正前后的实测值与反演值分别如图6(a)中黑色散点和红色散点所示.(9)式为校正后的3 次方最小二乘法反演模型,常数项由0.93 校正为1.71,校正前后的实测值与反演值分别如图6(b)黑色散点和红色散点所示.由图6 可知,校正后的模型消除了系统偏差,反演效果良好,所以将校正后的模型作为最终模型.
依据4.1 节的方法,共获得南海光学遥感观测的44 个内孤立波速度数据,将所得的遥感观测数据按水深划分为400—1200 m,300—399 m,200—299 m 和83—199 m 四个范围,用3 种模型对光学遥感数据进行反演.反演结果如表2 和图7所示.

表2 内孤立波速度反演模型精度验证表Table 2.Precision verification table of internal solitary wave velocity inversion model.

图7 内孤立波速度反演模型精度验证图 (a)—(d) 3 种反演模型对400—1200 m、300—399 m、200—299 m、83—199 m 水深范围的内孤立波的速度反演结果散点图;(e) 3 种反演模型对83—1200 m 水深范围的内孤立波的速度反演结果散点图;(a)—(e) 黑色散点为最高幂次为2 次方的最小二乘法反演模型结果,红色散点为最高幂次为3 次方的最小二乘法反演模型结果,蓝色散点为SVR 反演模型结果;(f) 三种反演模型对400—1200 m、300—399 m、200—299 m、83—199 m 水深范围的内孤立波的速度反演结果的平均绝对误差柱状图Fig.7.Precision validation diagram of the internal solitary wave velocity inversion model: (a)–(d) Scatter plots of inversion results of three inversion models for internal solitary waves speed in water depths of 400–1200 m,300–399 m,200–299 m and 83–199 m,respectively;(e) scatter plot of inversion results of three inversion models for internal solitary waves speed in water depths of 83–1200 m;(a)–(e) the black scattered points are the results of least squares inversion model with the highest power of 2,the red scattered points are the results of least squares inversion model with the highest power of 3,and the blue scattered points are the results of SVR inversion model;(f) the average absolute error histogram of the inversion results of the three inversion models for internal solitary waves speed in the water depths of 400–1200 m,300–399 m,200–299 m and 83–199 m.
由图7(a),(c),(d),(f)可知,SVR 内孤立波速度反演模型在水深400—1200 m 和83—299 m 的范围精度要高于最小二乘法的两种模型.由图7(b),(f)可知在水深范围300—399 m 时,最小二乘法内孤立波速度反演模型精度较高,其中3 次方的反演模型误差最小,精度最高.从图7(f)还可看到,在各个水深二次方和三次方的最小二乘法内孤立波速度反演模型精度相差较小,所以在满足精度要求时内孤立波速度反演方程就可以采用二次方程描述.
5 总结
本文在实验室中搭建内孤立波光学遥感仿真平台,进行了系列仿真实验.提取并处理实验数据,建立样本库.利用最小二乘法和机器学习SVR 两种技术建立了内孤立波速度反演模型.共建立了三种反演模型,分别是最小二乘法3 次方内孤立波速度反演模型、最小二乘法2 次方内孤立波速度反演模型和SVR 内孤立波速度反演模型.
收集南海内孤立波光学遥感图像,提取遥感参数和水文参数,利用多时间图像法计算内孤立波速度,作为内孤立波现场实测速度,对反演模型精度进行验证.最小二乘法建立的两个反演模型对实测数据反演时存在系统误差,所以利用实测数据对反演模型进行了校正.之后将三种模型按不同水深范围分别进行精度验证,结果为: SVR 内孤立波速度反演模型在水深400—1200 m 和水深83—299 m的范围精度要高于最小二乘法的两种反演模型,表明了SVR 非线性拟合能力更强.在水深范围300—399 m 时,最小二乘法内孤立波速度反演模型精度较高,其中3 次方的反演模型误差最小,精度最高.三种模型的反演精度和误差基本都在合理范围,在进行真实海洋条件实际应用时,可以将两种方法的模型结合应用,当SVR 内孤立波速度反演模型更适用于水深范围为400—1200 m 或83—299 m,水深范围在300—399 m 时,优选3 次方最小二乘法内孤立波速度反演模型进行速度反演.两种方法结合的方式,可以从不同角度理解内孤立波的速度.
通过南海海域遥感数据的验证可知,最小二乘法内孤立波速度反演模型和SVR 速度反演模型均具有较高精度,最小二乘法内孤立波速度反演模型给出回归方程进行反演,物理意义更为直观;SVR 内孤立波速度反演模型则在全水深都具有较高精度.两种模型都可应用于南海的内孤立波速度反演.
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
现代临床医学(2021年6期)2021-11-20 06:34:30
作文周刊·小学一年级版(2018年13期)2018-05-22 11:42:50
上海师范大学学报·自然科学版(2018年3期)2018-05-14 13:47:10
Coco薇(2016年7期)2016-06-28 02:09:09
作文·初中版(2015年10期)2015-10-26 16:37:53
浙江国土资源(2015年4期)2015-05-09 08:43:59
机械制造与自动化(2014年1期)2014-03-01 04:22:04
文苑·感悟(2013年9期)2013-04-29 13:03:31