
四轮独立驱动EV侧向稳定性H∞鲁棒容错控制
2023-02-16 12:25龙云泽封进张瑞宾韦韬
机械科学与技术 2023年1期
龙云泽, 封进, 张瑞宾, 韦韬
(桂林航天工业学院,汽车工程学院,广西桂林 541004)
四轮独立驱动电动汽车(Electric vehicle, EV)相比于传统单动力源车辆具有冗余的动力装置,因此具有动态控制灵活、传动简单、传动效率高、底盘结构简单等优点。四轮独立驱动电动汽车依靠四轮灵活的控制策略可实现整车在极端环境下优越动力性能和操纵性能。而由于轮毂电机的工作环境复杂多变,使车辆对电机线控驱动系统的安全性和稳定性要求较高[1-2]。4个轮毂电机的工作不协调,会造成轮胎拖拽、能量效率降低、车辆失稳等问题,甚至在极端情况发生事故,严重威胁到车辆行驶安全[3]。四轮独立驱动电动汽车侧向稳定性的容错控制对提升车辆的安全性能具有重要的意义。
近年来,国内外学者对四轮独立驱动电动汽车的转矩分配控制进行了大量的研究[4-6]。容错控制已成功应用于航天及计算机领域,在四轮独立驱动电动汽车上的相关的研究工作正在相继展开,目前研究的方向主要分为被动容错控制和主动容错控制[7]。被动容错控制的思路是在故障发生时,通过鲁棒控制等方法,降低故障信息对整车稳定性的敏感程度,从而不需要改变系统结构及控制器便可实现容错控制效果。褚文博等[8]研究了基于规则转矩分配的被动容错控制策略,在车辆单个轮毂电机故障及异侧两个轮毂电机故障时,采用协同驱动方法提升了横向稳定性。刘新磊等[9]研究了双电机失效的容错控制策略,提升了车辆安全性。主动容错控制的特点在于根据故障实时重组动力学模型或重构控制器。主动容错控制可以解决四轮独立驱动汽车复杂故障问题,具有较好的鲁棒性,是目前研究的重点。Zhang等[10]提出了一种运用虚拟控制量的H∞鲁棒控制方法,通过控制重构分配算法有效提升了四轮独立驱动汽车的稳定性。刘国海等[11]将故障车辆模型转化为凸多面体线性模型,通过重构控制器提升车辆安全性及稳定性。国内外对四轮独立驱动电动汽车容错控制的研究普遍未考虑整车动力模型参数的不确定性,对多样化的故障的形式研究较少。为解决四轮独立驱动汽车的模型参数的不确定性问题,同时考虑传感器故障和执行器故障,建立参数不确定车辆模型,提出一种H∞鲁棒主动容错控制方法,保证控制系统渐近稳定性并使系统性能满足给定的H∞指标约束,提升车辆的侧向稳定性和行驶安全性。
1 四轮独立驱动电动汽车参数不确定动力学模型
二自由度车辆动力学模型将四轮车辆简化成为双轮模型,具有结构简洁的特点,能较好地反映车辆转向行驶时的操纵稳定性,便于研究车辆在行驶过程中模型参数不确定性及车辆的侧向鲁棒稳定性问题。四轮独立驱动电动汽车模型考虑整车侧向运动、横摆运动自由度,搭建二自由度整车动力学模型如图1所示。
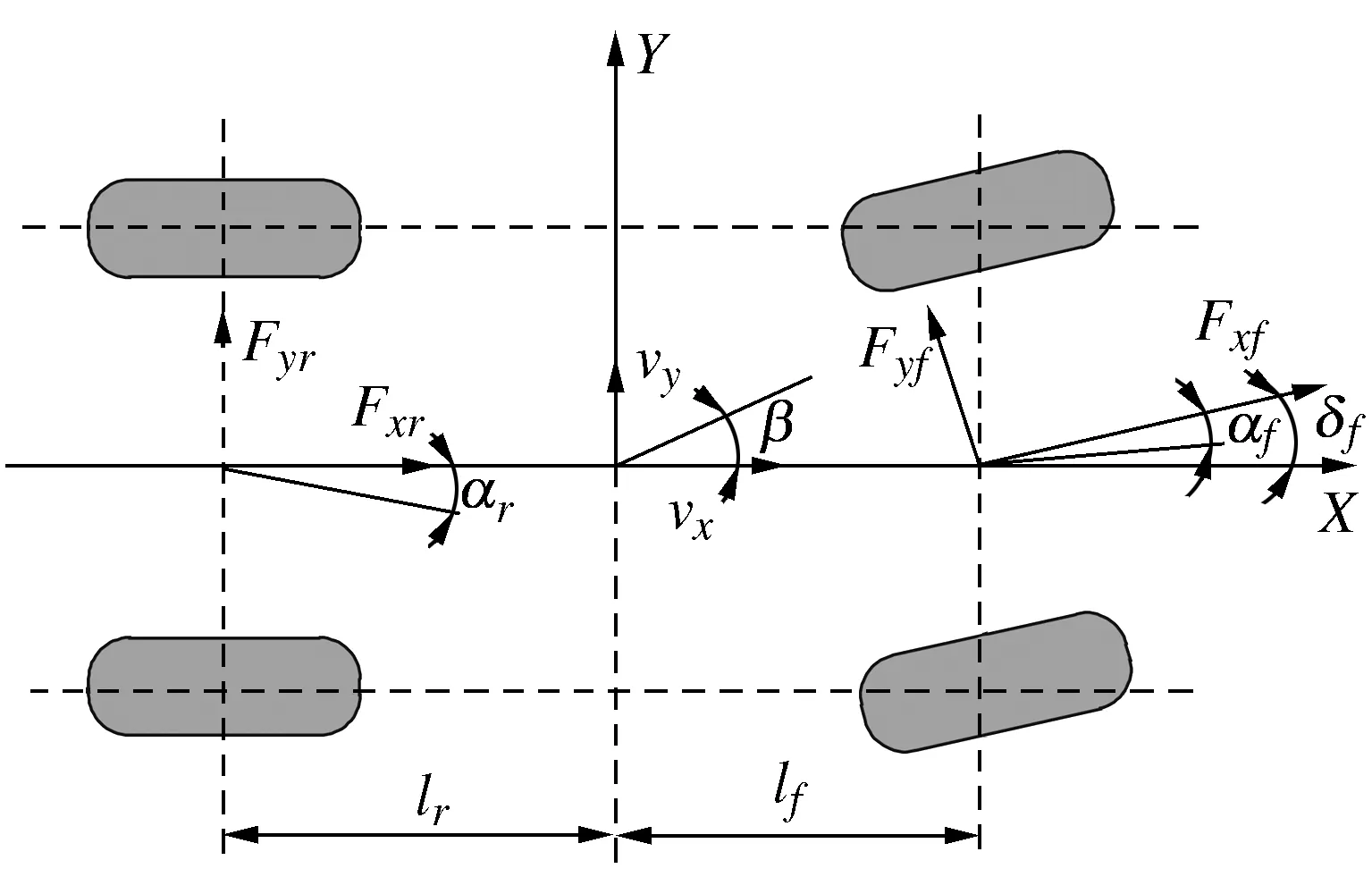
图1 四轮独立驱动电动汽车二自由度模型
模型忽略车辆的垂向运动、绕x轴侧倾运动、绕y轴的俯仰运动、滚动阻力影响、风阻影响。建立未考虑参数不确定性的车辆动力学模型如下[12-13]:

(1)

(2)
may=Fyf+Fyr
(3)

(4)

(5)
(6)
β=vy/vx
(7)

(8)

(9)
式中:vx为车辆纵向速度;vy为车辆横向速度;γ为车辆横摆角速度;ax为车辆纵向加速度;ay为车辆侧向加速度; ΔM为主动附加横摆力矩;β为质心侧偏角;δf为为前轮转向角;m为整车质量;αf、αr分别为前、后轮轮胎侧偏角;lf、lr分别为质心至前、后轴距离;Cf、Cr分别为两前轮、两后轮合侧偏刚度;Iz为整车绕z轴的转动惯量。
联立式(1)~式(9),可得车辆动力学模型如下:
(10)

式(10)车辆动力学模型,考虑车辆侧偏刚度参数非线性影响,引入不确定因子ρ1、ρ2,描述在车辆行驶过程中侧偏刚度系数的影响:
(11)
式中:不确定因子ρ1、ρ2满足范数有界性;Crep为侧偏刚度系数参数值。采用矩阵函数方式定义故障模式,将引入执行器故障输入的系统控制量定义为ua(t)=Fau(t),其中Fa为执行器故障矩阵。定义Fs为传感器故障矩阵,则Cs(t)=FsC1,Ds(t)=FsD2。联立式(10)与式(11),可得引入执行器与传感器故障的参数不确定车辆动力学模型Gu:
(12)
式中:ΔA(t)、ΔB(t)、ΔC(t)为时变不确定矩阵函数,满足范数有界性。
[ΔA(t) ΔB(t) ΔC1(t)]=Gφ(t)[E1E2E3](13)
式中:G、E1、E2、E3为常特征矩阵;φ(t)为范数有界不确定性时变矩阵,且满足φT(t)φ(t)≤I。传感器观测时变不确定性矩阵函数ΔC1(t),其特征具有随机性,定义其为单位协方差的零均值白噪声误差矩阵。联立式(11)、式(12)可得时变不确定性矩阵函数ΔA(t)、ΔB(t)分别为:

(15)

(16)
2 车辆H∞鲁棒容错控制器设计
采用分层设计的方法实现车辆侧向稳定性容错控制。上层为考虑执行器与传感器失效状态的H∞鲁棒容错控制器,实现外部干扰到系统可控输出传递函数的H∞性能指标小于设定值。下层控制器建立考虑车轮附着利用率和能量消耗率的目标函数,实现车轮力矩分配优化。
2.1 上层H∞鲁棒容错控制器
式(12)车辆动力学模型考虑系统易发生故障的执行器及传感器,设计输出反馈容错控制器,保证参数不确定车辆动力学系统渐近稳定,且范数有界型外部干扰ω(t)到系统可控输出Z(t)的传递函数的H∞性能满足给定的干扰衰减指标γ,即
‖GωZ‖∞<γ
(17)
式中:GωZ为干扰ω(t)到系统可控输出Z(t)的传递函数;γ为系统鲁棒稳定性H∞性能指标。
令所需设计的输出反馈容错控制器形式为:
(18)
式中:Ad、Bd、Cd分别为输出反馈控制器的系统矩阵、反馈控制矩阵、控制量输出矩阵。
控制器与式(12)车辆动力学模型组成闭环控制系统,如图2所示。
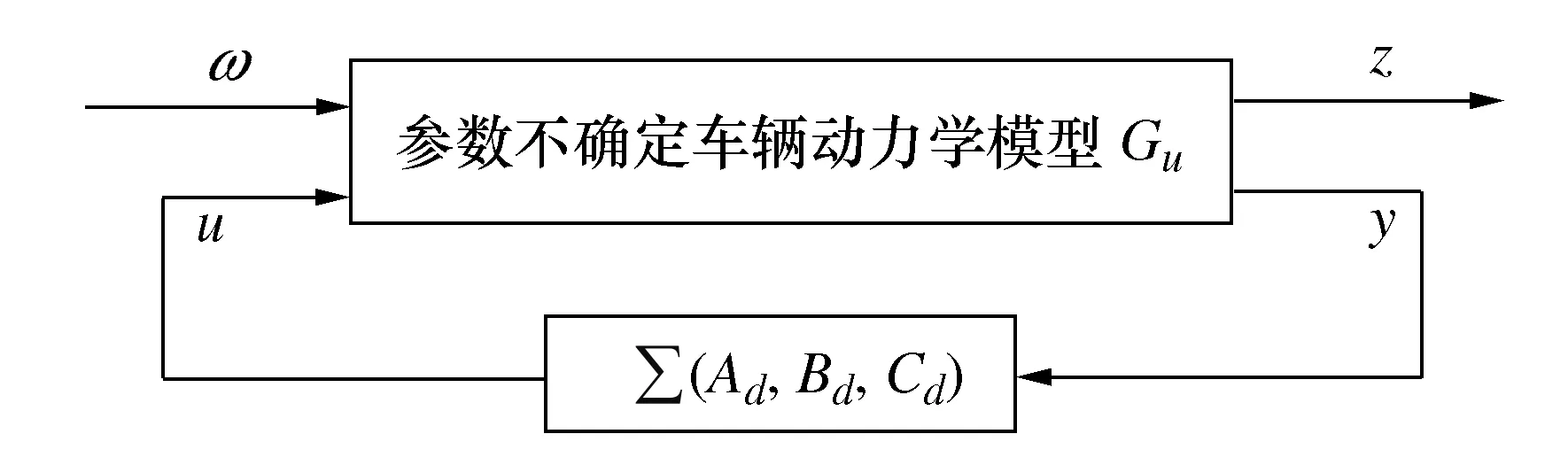
图2 车辆动力学模型的闭环控制系统
考虑故障矩阵的车辆时变不确定性动力学模型式(12),引入输出反馈容错控制器式(18) 后,实现对系统稳定性及鲁棒性实时控制。为研究闭环控制系统的性能,联立式(12)、式(18),得闭环控制系统的状态空间表达形式如下:
(19)
将系统的状态方程式(19)简化成外部干扰ω(t)到系统可控输出Z(t)状态空间形式如下:
(20)
式中:xs(t)=[x(t)xd(t)]T;ω(t)=[ω1(t)ω2(t)]T。
设计车辆H∞鲁棒容错控制器即是解决式(20)系统在执行器故障Fa与传感器故障Fs输入情况下,同时考虑系统时变不确定性影响因素,求解出输出反馈容错控制器的参数Ad、Bd、Cd。下面给运用矩阵不等方法解决H∞控制问题的有界实引理:
引理 对系统G(s)=(G,B,C,D):

(21)
其中A稳定,对于给定的H∞性能指标γ,以下两个条件是等价的:
1) 系统渐近稳定,且‖G‖∞<γ;
2) 存在正定对称矩阵Z,满足矩阵不等式:
(22)
为解决控制器的求解,定义正定对称矩阵Z及相对应的逆矩阵Z-1,并构造相关矩阵Λ,形式如下:
(23)
根据引理,输出反馈容错控制器使系统模型式(19)满足H∞鲁棒控制要求的条件为:
(24)
将矩阵Ψ左乘diag{Λ,0,0},右乘diag{Λ-1,0,0},可得以下矩阵不等式:
(25)
式中:
Φ11=AP+PAT+BFaCdNT+(BFaCdNT)T;
Φ22=QA+ATQ+MBdFsC1+(MBdFsC1)T;
Φ21=AT+QAP+ATQ+MBdFsC1P+QBFaCdNT+MAdNT;
Θ32=QD1+MBdFsD2;
Θ41=C2P+BFaCdNT;
ΔΦ11=ΔAP+PΔAT+ΔBFaCdNT+(ΔBFaCdNT)T;
ΔΦ22=QΔA+ΔATQ+MBdFsΔC1+(MBdFsΔC1)T;
ΔΦ21=ΔAT+QAP+ΔATQ+MBdFsΔC1P+QΔBFaCdNT。
联立式(12)、式(13)、式(25),得系统满足H∞鲁棒控制性能要求的条件为存在正数ε使得以下矩阵不等式成立:
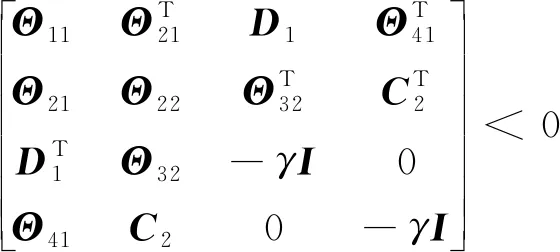
(26)
式中:
G2=MBdFsG;G3=(E1P)T(E1P)+(E3P)T(E3P);
Θ11=Φ11+ε-1G3+ε-1(E3FaCdNT)T(E3FaCdNT)+
(ε+ε-1)GGT;
Θ21=AT+QAP+MBdFsC1P+QBFaCdNT+MAdNT;
式(26)中包含有执行器故障矩阵Fa及传感器故障矩阵Fs未知项的耦合,为便于矩阵不等式的求解,定义如下矩阵变量:
(27)
(28)
根据引理,式(28)成立要求式(20)闭环控制系统中As是稳定,进行其稳定性证明:
2.2 下层转矩分配控制器


以车轮附着利用率最小化为优化目标[14],可得车辆四轮动力分配优化目标函数一如下
(30)
式中:Fzfl、Fzfr、Fzrl、Fzrr分别为车辆左前、右前、左后、右后车轮垂直承载力。考虑车辆在行驶过程中能量消耗最小控制原则,设定转矩分配优化目标函数二如下

(31)
式中:T=[TflTfrTrlTrr]T,Tfl=Fxfl·r、Tfr=Fxfr·r、Trl=Fxrl·r、Trr=Fxrr·r分别为车辆左前、右前、左后、右后车轮驱动转矩,r为车轮滚动半径;R为正定对称权矩阵。
综合优化目标函数一与优化目标函数二可得考虑车轮附着利用率和能量消耗率的车轮力矩分配优化目标函数
J=J1+J2
(32)
求解目标函数J可得车辆实时分配驱动力控制量Fx=[FxflFxfrFxrlFxrr]T及驱动转矩T=[TflTfrTrlTrr]T。
3 仿真实验验证
CarSim是一款具有高效的建模与模拟流程的车辆动力学仿真软件,具备完善的数据分析功能,可以快速分析车辆动力学仿真过程中的各类问题,仿真结果被国际众多汽车制造商和零部件供应商所采信。搭建CarSim与MATLAB/Simulink联合仿真平台[15]。在Simulink中建立含带故障输入的参数不确定性的车辆动力学模型;设计车辆侧向稳定性H∞鲁棒容错控制器进行车轮转矩控制,并将控制量输入CarSim中车辆模型进行仿真分析。联合仿真的原理如图3所示。

图3 联合仿真实验原理
引入车辆动力学模型参数不确定性条件为:
设不确定性时变矩阵φ(t)=sin(t),则可得:



选用CarSim软件中一款B型车作为研究对象,将其四车轮的输入力矩设为Simulink中控制输出量。整车关键参数,如表1所示。选定蛇行工况及双移线工况实验场景,进行控制器性能实验验证。在行驶过程中,引入执行器故障与传感器故障。
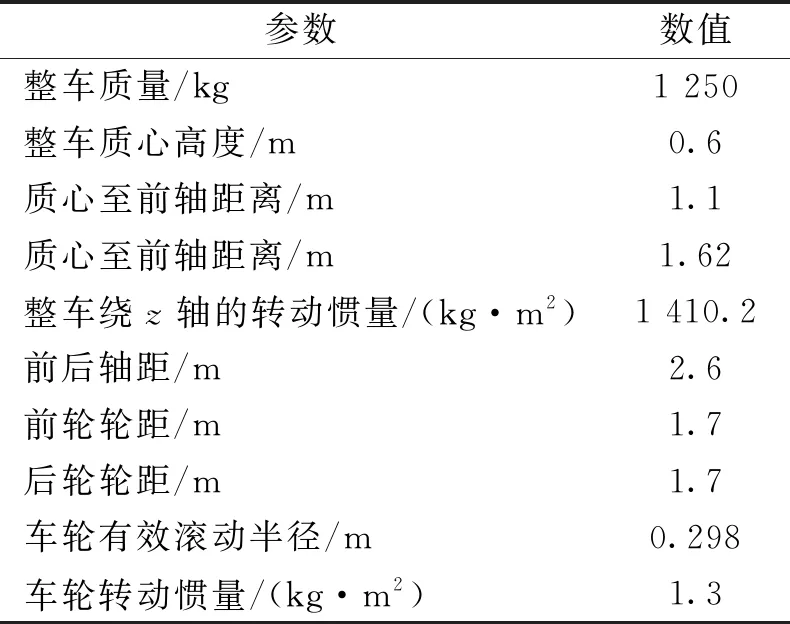
表1 整车关键参数
蛇行工况实验:采用ISO蛇形驾驶工况;选择砾石路面,路面附着系数为0.55;车辆行驶速度为70 km/h。考虑车辆在行驶过程中出现执行器故障,前轮转角及附加横摆力矩出现较大偏差,其故障的影响用矩阵Fa表征。同时系统可测输出量y(t)出现传感器故障,故障的影响用矩阵Fs表征。故障出现随时间逐步加载,模拟车辆故障从部分失效到深度失效的整个过程,如表2所示。进行联合仿真实验可得,车辆在控制器作用下的质心侧偏角、横摆角速度、路径跟踪效果与无控制原车对比如图4所示。
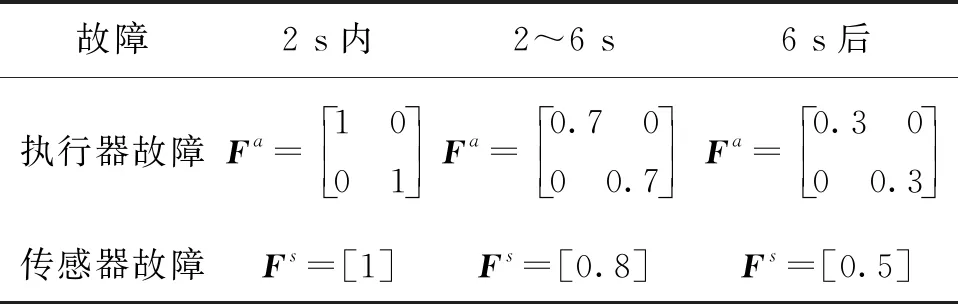
表2 蛇行工况实验故障设置

图4 蛇行工况实验结果
双移线工况实验:在CarSim中建立双移线行驶工况,实验的路面选择低附着的冰雪路面,路面的附着系数为0.2;车辆行驶速度为50 km/h。考虑在行驶过程中车辆出现执行器故障,同时出现传感器故障,故障矩阵随时间变化的状态如表3所示。进行联合仿真实验,得车辆质心侧偏角、横摆角速度、路径跟踪效果如图5所示。
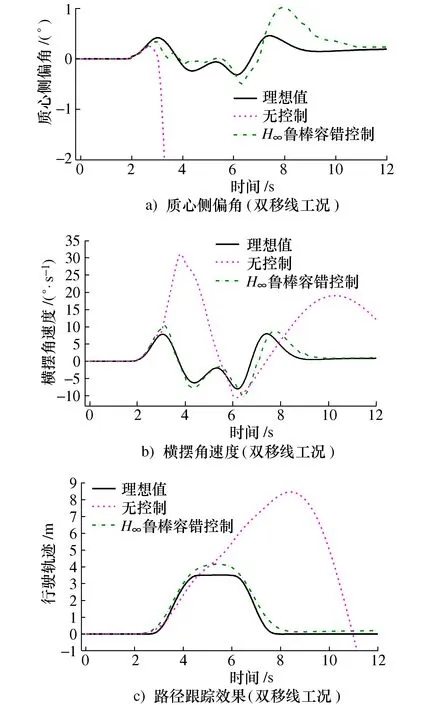
图5 双移线工况实验结果

表3 双移线工况实验故障设置
由图4蛇形工况仿真实验结果可知,在2 s后由于执行器故障与传感器故障的影响造成无控制原车的行驶路径逐渐偏离理想值,质心侧偏角和横摆角速度出现发散状态,且随着6 s后故障的加重车辆的侧向稳定性深度恶化。H∞鲁棒容错控制器在故障发生后能及时调节控制量,使车辆保持良好的侧向稳定性;跟踪理想值效果存在一定的时间滞后,但车辆总体处于良好的稳定行驶状态。
由图5双移线工况仿真实验结果可知,低附着的冰雪路面上发生车辆故障时,无控制原车很快失去稳定能力,车辆出现严重侧滑现象。H∞鲁棒容错控制器使车辆保持良好的稳定性,在故障程度加重后车辆的质心侧偏角及横摆角速度与理想值的差值出现一定放大,但很快能恢复到较小差值跟踪状态。由仿真实验可知,所设计H∞鲁棒容错控制器可以解决四轮独立驱动电动汽车动力学模型参数不确定性影响及执行器和传感器同时存在故障时车辆的侧向稳定性控制问题,具有较好的控制精度及优良的鲁棒性。
4 结论
1) 为现实参数不确定四轮独立驱动电动汽车容错控制,建立了考虑执行器及传感器故障的二自由度整车参数不确定性动力学模型。给出一种运用故障矩阵函数引入车辆连续性故障的方法,为四轮独立驱动电动汽车容错控制的动力学建模提供新的思路。
2) 采用车辆侧向稳定性容错分层控制方法,上层为H∞鲁棒容错控制器,下层为转矩优化分配控制器。上层控制器中运用线性矩阵不等式求解方法设计输出反馈容错控制器,保证车辆动力学系统渐近稳定性并使系统H∞鲁棒性能满足给定的鲁棒性能指标γ。下层控制器给出一种考虑车轮附着利用率和能量消耗率的综合优化转矩分配方法,建立了综合优化目标函数,实现车轮力矩分配。搭建CarSim与MATLAB/Simulink联合仿真实验平台,验证H∞鲁棒容错控制器的有效性。进行蛇行工况及双移线工况在不同故障模式下的车辆稳定性分析。仿真结果表明,所设计H∞鲁棒容错控制器能使四轮独立驱动电动汽车在发生故障时保持良好的侧向稳定性,有效提升了车辆的安全性,具有良好的鲁棒性。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
自动化学报(2019年6期)2019-07-23
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
自动化学报(2017年4期)2017-06-15
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
浙江大学学报(工学版)(2015年2期)2015-05-30
