
基于Kinovea线性插值假人头部位移的计算
2023-02-14 08:06蒋运诚
汽车零部件 2023年1期
蒋运诚
1.上海大学管理学院,上海 200444;2.亿科检测认证有限公司,江苏苏州 215331
0 引言
儿童安全座椅是用于儿童乘员车上使用的安全装置,在发生事故或者突然刹车的时候,能够起到约束儿童移动而避免受伤的作用。在儿童安全座椅测试中,有很多指标需要考查,在我国国标GB 27887—2011[1]、欧洲标准UNECE R44和UNECE R129、美国标准FMVSS 213中[2],假人的头部位移是主要的评判指标之一。因此假人的头部位移计算准确至关重要。通过高速摄像机可以将拍摄对象投影到二维平面上得到相应的碰撞视频[3],借助相应的软件可以完成有关头部的位移计算[4]。
儿童安全座椅测试中,图像分析是必不可少的分析方法[5],Kinovea是一款功能强大的运动分析软件[6],可以逐帧播放高速相机所拍摄的视频。本文根据该软件的部分功能,优化儿童安全座椅测试过程中假人头部位移计算的准确度。
1 相机成像原理
凸透镜成像原理如图1所示。

图1 凸透镜成像原理
图1中,H代表实际物体的高度;h表示H在相机成像的高度;u代表物距,即相机到拍摄对象之间的距离;v代表像距,即相机镜头的凸透镜到感光传感器之间的距离。
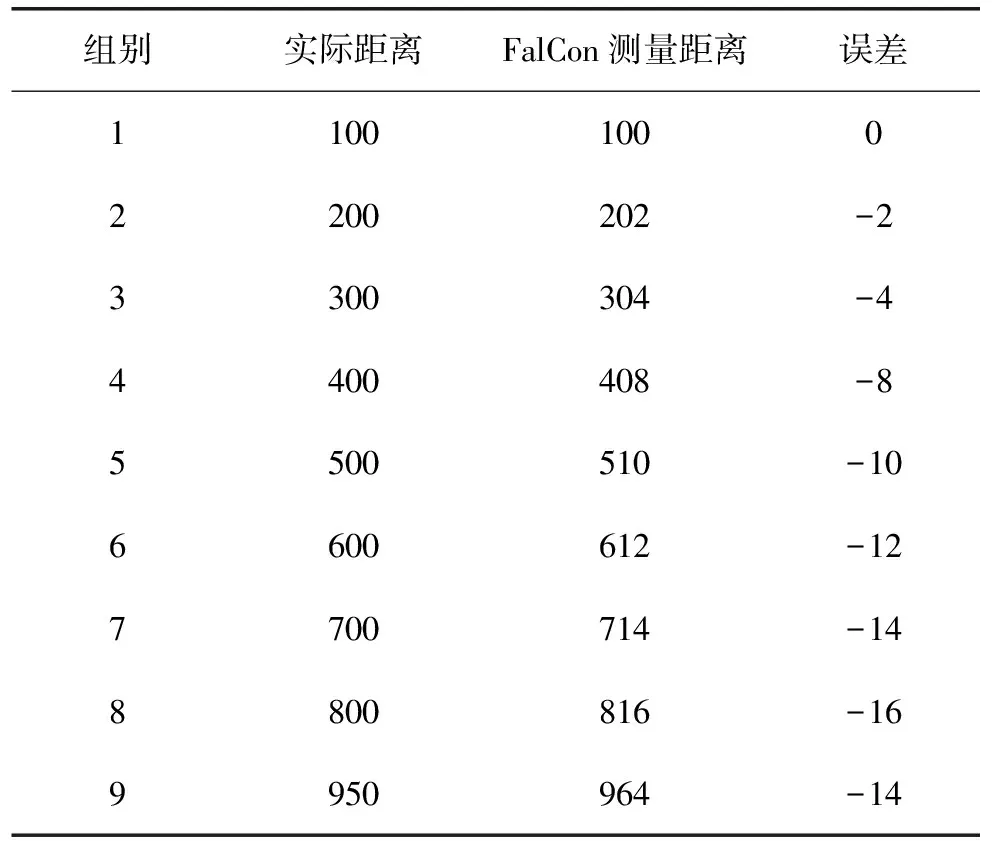
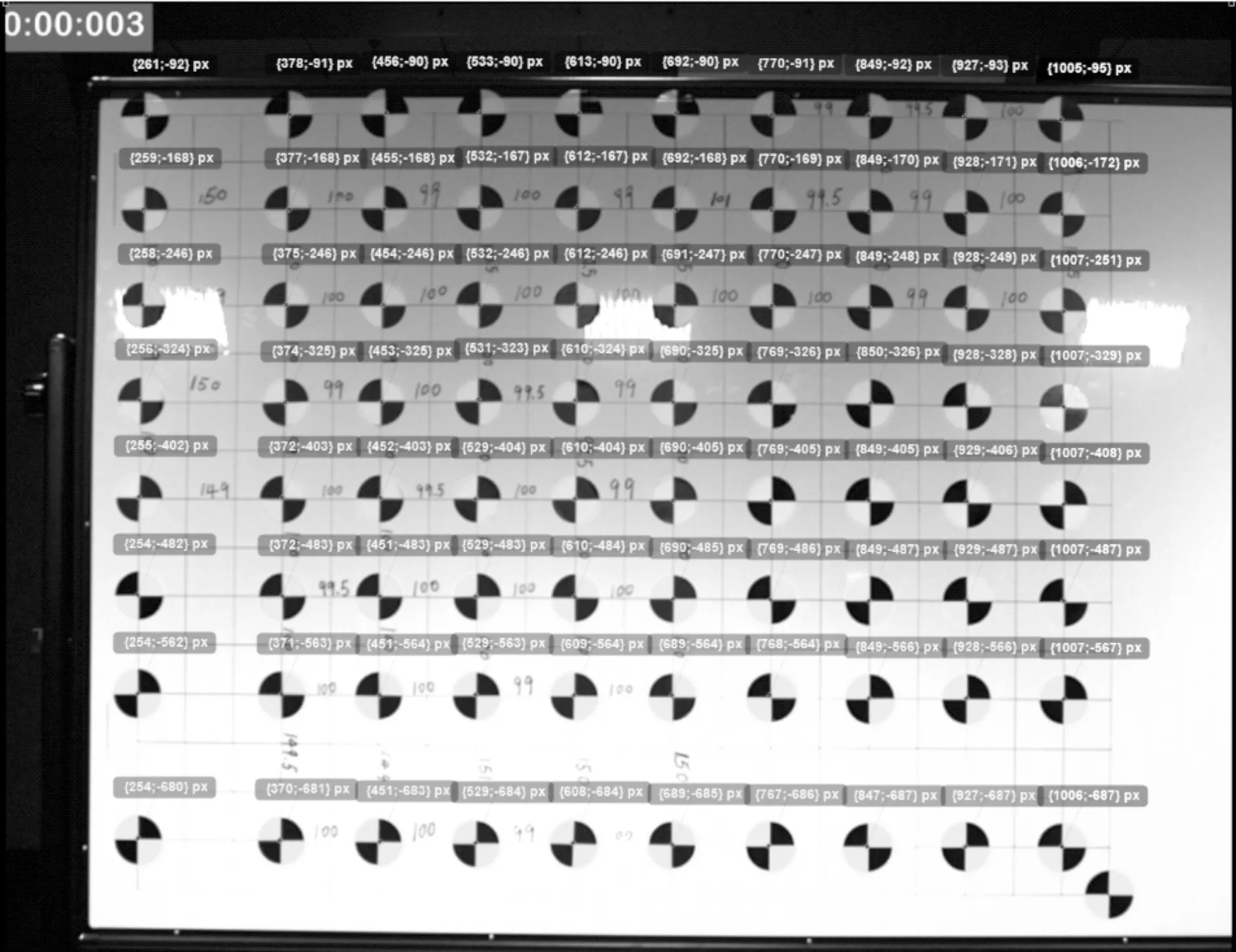
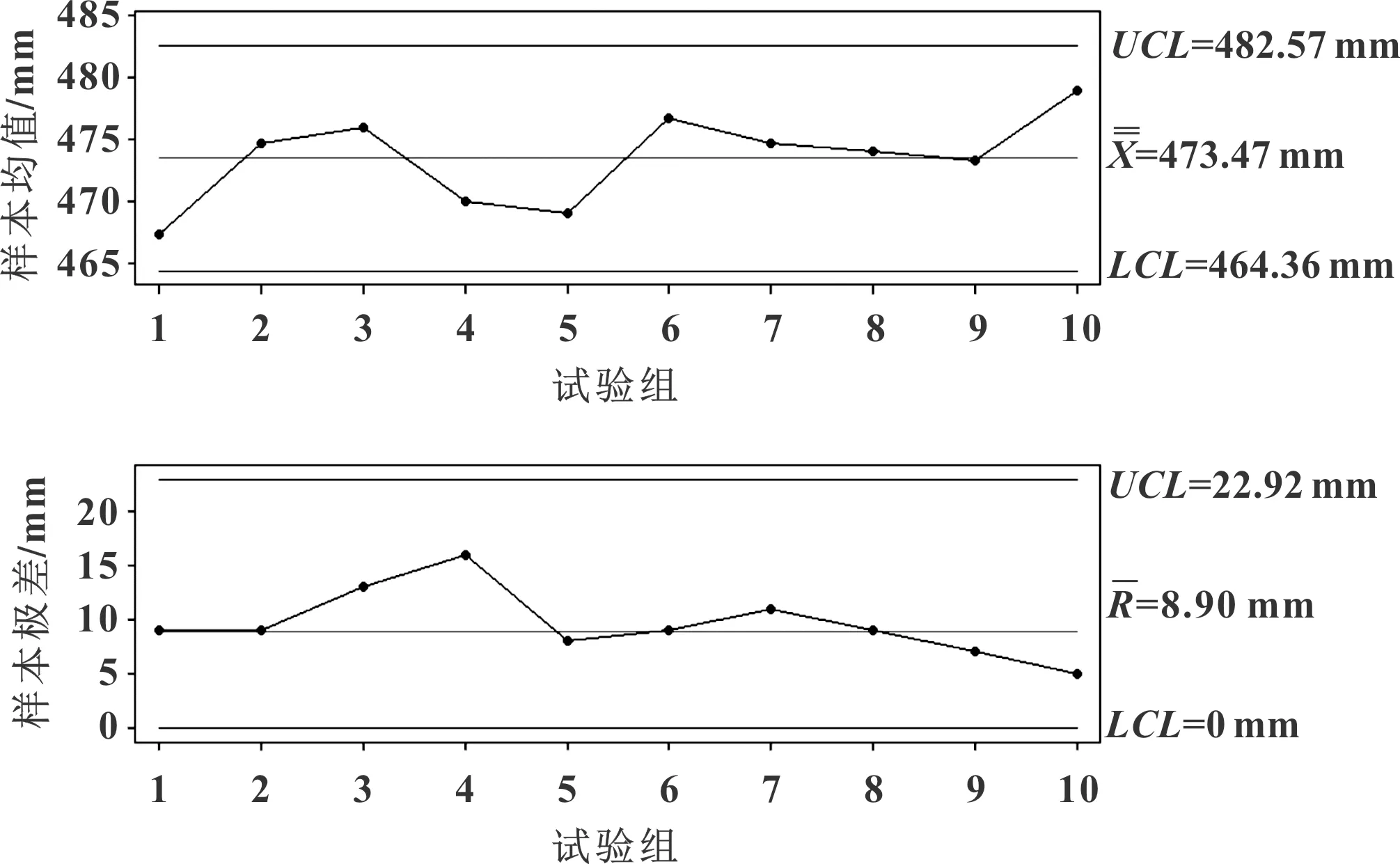
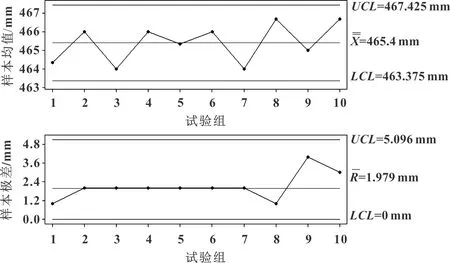
相机的成像原理要满足物距u>2f,像距应满足f 由图1可得到△AOB∽△A′OB′,所以可以得到 (1) 待定系数A的计算公式为: (2) 式中:H′,h′,u′由两个已知距离的标记点计算出来。 所以有 (3) 首先将儿童安全座椅按照说明书要求的方式进行安装,再将儿童假人按照GB 27887要求的方法安装到儿童安全座椅上面,将假人的传感器连接到数据采集器,用于碰撞瞬间采集儿童身体的加速度等数据。测试前检查并调试左侧、右侧以及顶部的相机状态,选择合适的相机镜头。将每一部高速相机的采集频率设置为1 000帧/s,并将高速相机状态设置为待触发状态。为了满足高速相机的拍摄,在台车轨道附近配备有高亮度的LED光源。试验室采用的是德国PCO高速相机,配有多款镜头,不同的镜头存在不同程度的畸变,此次测试使用的两部车载相机使用的镜头焦距为12 mm和16 mm,顶部相机使用的镜头焦距为8 mm。 试验使用的设备是加速式台车,将台车的速度和加速度按照GB 27887设置完成并将高速相机和数据采集系统以及滑台设置为同一触发信号T0,即在滑台开始移动的瞬间,数据采集器和高速摄像机也同步开始工作。整个模拟碰撞持续的时间约为100 ms,高速相机采集的时间为300 ms。碰撞完成以后,数据采集器和高速相机自动下载原始数据。 基于上述的相机成像原理,在图像分析软件FalCon中打开一个撞击测试视频,定义3个点标,分别记为M1、M2、M3,如图2所示。其中M3作为基准点,M1、M2的距离u′为300 mm,即上述公式中的参数H′输入相机镜头到点标平面之间的距离。M1、M2两点之间的像素点为h′;输入相机到拍摄物体之间的距离为5 355 mm,即表达式中的u。在图2中完成从基准点M3到假人头部边缘的数据采集,即高度h从最大位移之前开始采集到最大位移之后结束采集。因此在众多数据中必有一帧对应的是假人头部最大的位移,根据散点图可以描绘出如图3所示的曲线。因此可以得出在该测试中,通过FalCon计算得到的假人最大头部位移为665 mm。在该测试中,M1到M2之间的比例尺为300 mm,在视频中靠近中间的区域,但是在实际测量中M3到假人头部轮廓边缘靠近视频的边界区域。考虑到相机镜头的畸变,将M1、M2作为比例尺,线性计算M3到假人头部位移不够精确。 图2 FalCon软件界面 图3 位移曲线 本文采集9组数据进行实际距离与误差之间的Person相关系数分析,结果见表1。 表1 实际距离与误差之间的Person相关系数分析结果 单位:mm 相关系数计算过程如下: (4) 将实际距离和误差代入式(4)可以得到: (5) Minitab相关性分析如图4所示。 图4 Minitab 相关性分析 由图4可知,相机镜头越靠近边缘位置,畸变越大,产生的计算误差也就越大。 如图5所示,在一块平整的白板上画好100×100网格,并在每一个定位格点上粘贴定位标贴,再使用钢直尺准确测量并记录相邻定位标贴中心点的距离,并记录在表2中。 图5 标定板示意 表2 X方向相邻点的实测距离 单位:mm 首先将高速相机固定好位置,并且记录好相机位置,后续测试保持该机位的统一。然后把制作好的标定板放在将要测量的假人中心面所在的平面内。最后调整好相机参数,拍摄10 ms时长的视频并保存为V1,如图6所示。 图6 基准平面示意 保持相机位置不变,安装并固定测试夹具,以R44座椅为例进行Cr点(座椅的座面和靠背相交线称为Cr线,Cr线的中点称为Cr点)的采集,按第3.2节的方法,采集10 ms的视频并保存为V2,如图7所示。 图7 座椅基准示意 使用Kinovea软件打开视频V1和V2,使用像素坐标功能将所有的标贴以及Cr点的像素坐标读取并记录在表3中,像素坐标如图8所示。 表3 X方向像素坐标值 图8 像素坐标示意 在Kinovea软件中可以得到V2视频中的Cr点坐标位为(799,-930),查阅表3可以得到该点的X坐标在767~847范围内,即在X7~X8范围内,根据线性插值可以计算Cr点距离标记点(X7,Y8)的距离为: (6) 在一次常规撞击测试中采集撞击的视频,利用Kinovea软件打开,使用“视频叠加”功能在假人头部位移最大的时刻与V1叠加,如图9所示。同时使用“选点”功能选取假人头部轮廓最大位移的点,并记录该点的像素坐标X2(397,-539)。该点的X方向坐标在371~451范围内,距离标记点(X3,Y7)的距离为: 图9 视频叠加示意 (7) 记X3~X4距离为D3,X4~X5距离为D4,X5~X6距离为D5,X6~X7距离为D6,由表2可知Y7所在行对应的D3、D4、D5、D6分别是100、99、100、100 mm。所以,此测试假人头部最大位移为:D=D1+D2+D3+D4+D5+D6=40+67.5+100+99+100+100=506.5(mm) 试验室分别使用FalCon软件和上面提出的位移计算方法,对同一产品的相同测试条件进行了30次撞击测试数据的统计,其结果见表4和表5。 表4 FalCon计算结果统计 单位:mm 表5 Kinovea插值计算结果统计 单位:mm FalCon统计数据均值极差控制图如图10所示,Kinovea统计数据均值极差控制图如图11所示。 图10 FalCon统计数据均值极差控制图 图11 Kinovea统计数据均值极差控制图 由图10可知,FalCon统计的结果均值为473.47 mm,上控制线为482.57 mm,下控制线为464.36 mm,平均极差为8.90 mm。由图11可知,Kinovea统计的结果均值为465.4 mm,上控制线为467.425 mm,下控制线为463.375 mm,平均极差为1.979 mm。经过对比,Kinovea统计数据的过程稳定性明显高于FalCon软件所统计的数据稳定性。 根据微分原理,网格越小,两点之间的连线越接近于直线,即上述线性插值计算的精度越高。根据统计发现,100×100的网格足以满足该试验中的假人头部位移计算。在上述方法中,得到像素坐标点以后,要查阅表2和表3才能完成相应的插值计算,本文也尝试过使用Excel中的脚本功能,编写代码可以快速完成像素点位的索引并完成计算,返回位移计算结果,这种方式可以大大提升Kinovea线性插值计算假人头部位移的效率。在儿童安全座椅模拟碰撞测试中,假人头部位移的计算是必不可少的步骤,通过Kinovea软件的功能,实现线性插值,减少相机镜头畸变导致的误差,以此来提高假人头部位移的精度。
2 模拟碰撞试验
2.1 试验过程
2.2 FalCon软件的参数设定


2.3 FalCon的结果误差分析

3 基于Kinovea软件位移计算的研究
3.1 标定板制作


3.2 基准平面的图像采集

3.3 台车Cr 点坐标采集

3.4 像素点采集

3.5 线性插值
3.6 数据采集测试及位移计算

4 统计过程控制


5 结束语
猜你喜欢
军事文摘(2020年22期)2021-01-04
数学大王·低年级(2020年4期)2020-04-20
时代汽车(2020年23期)2020-03-03
汽车技术(2017年7期)2017-08-08
汽车工程学报(2016年6期)2017-01-11
故事作文·低年级(2016年7期)2016-05-14
工业设计(2016年5期)2016-05-04
天津医科大学学报(2015年2期)2015-12-22
汽车维护与修理(2015年7期)2015-02-28
早期教育(美术教育)(2010年7期)2010-06-28
