基于三维激光扫描点云整体分析的铁路隧道超欠挖检测方法
2023-02-13 04:19:34俞旻韬王永玮
铁道学报 2023年1期
韦 征,周 臻,俞旻韬,王永玮
(1.浙江省交通工程管理中心 轨道质量科, 杭州 310000;2.东南大学 土木工程学院, 南京 210096;3.杭州市建筑设计研究院有限公司 工业化设计研究院,杭州 310000)
隧道钻爆法施工中,隧道的超欠挖作为一种极大安全隐患,严重影响隧道开挖质量及后续施工[1]。因此,减少超欠挖的发生、及时发现超欠挖情况并做出相应弥补措施,具有重大的工程意义。隧道施工及检测中常用的轮廓检测的方法为激光断面仪法和台车检测法[2-4]。前者对某一隧道断面进行快速扫描,形成隧道断面的轮廓线并与设计断面进行对比,但无法获取断面之间的数据,想要获得隧道的完整信息仍然比较困难;尽管后者可以准确直观的测量隧道全部断面,但其操作繁琐,且对隧道的截面形式要求较高,对于曲线隧道,变截面隧道等无法获取理想的检测结果。
三维激光扫描技术是利用激光测距原理,配合全站仪可以在短时间内建立被测结构的三维模型[3]。三维激光扫描仪所获取的高密度点的集合称为点云。点云主要包括点的三维坐标、灰度值、色彩、反射强度等信息。通过点云的拼接契合度、噪点的数量、和色彩的色差等方面可以评价点云的精度。相较于传统方法,点云去噪后产生的误差极小,因此广泛应用于地铁盾构隧道壁面的检测中[4-5]。
三维激光扫描技术因具有检测速度快、数量大、自动化水平高、环境适应性强等特点,在轮廓较规则的隧道施工、运营中已得到广泛的应用[6-7]。Yoon等[8]试验了激光扫描仪对隧道面的自动检测,并提出了一种从试验模型中获取数据并集中提取隧道管理信息的算法。Moisan等[9]等结合了三维激光扫描技术与声呐技术,对运河隧道进行了静态扫描,构建运河隧道的全三维模型。杨洪权等[10]通过对激光扫描技术的开发,完成了隧道限界侵限的检测及侵限值的计算。但目前工程中对于超欠挖的测量,即使使用三维激光扫描仪也是以取断面形式进行超欠挖分析,同时在数据采集过程中存在各种误差,比如全站仪定位仪器以及标靶时的误差,水准路线引入控制点时产生的误差,多站点云拼接时的误差等,三维激光扫描仪自生的系统误差等。因此亟需一种对点云整体分析超欠挖的方法[11-12],并对隧道超欠挖进行合理、高效的全断面检测。
针对三维激光扫描仪在隧道施工检测中的适用性进行研究,首先研究了三次样条曲线对隧道面拟合的适用性,提出基于三维激光扫描点云拟合曲面并结合设计面法线的隧道超欠挖检测及计算方法;然后根据某隧道工程,对现场采集的点云数据拟合函数模型,并选取若干断面进行超欠挖计算,验证该方法的可行性。
1 点云预处理及曲线拟合
1.1 点云去噪
由于云点数据会受到环境、被测物体特性等因素影响而产生各种异常点,这些异常点会影响曲面拟合的计算,这些异常点通常称为噪点。根据噪点所处位置,通常将噪点分为游离于测量体以外的体外噪点和与测量体接近,且不易区分的体内噪点。因此,需要对点云的原始数据进行去噪处理。
对于体外噪点,由于其数量较少,剔除方便,通常选用k邻域去噪法来剔除;对于体内噪点,由于其与出体距离较近,通常选用迭代最小二乘法进行去噪。
1.2 点云抽稀
实验仪器FARO Focus3D X330型三维激光扫描仪的扫描速度为976 000点/s,点云数据依然非常庞大。为便于后续计算,所以对点云数据进行抽稀处理。点云抽稀又称点云压缩,即把点云数量精简到一个合适的大小但不影响其表达被测物体特点信息,对多数冗杂的点云数据进行删除。
1.3 点云坐标转化
从三维激光扫描仪中导出的数据为绝对坐标系上坐标,为方便计算,通过坐标转换,可把数据转换到坐标系原点再进行后续计算。为把把数据从初始OA坐标系下的XA、YA、ZA旋转平移至新坐标系OB中,变为XB、YB、ZB。
1.4 三次样条点云曲面构造
所谓点云拟合,是一种逆向工程建设的手段,根据三维激光扫描仪采集的离散点云数据在计算机中进行模拟的轮廓重建,它可以很直观地以函数图像等形式显示出来。在以断面为基础的曲线拟合上,常用的点云拟合方法有拉格朗日插值法、最小二乘曲线拟合法、Bezier曲线拟合法以及三次B样条曲线拟合法。
由于三次B样条拟合法能跟好的拟合出隧道断面的整体走势,并且在局部的表现优于其他拟合方法,因此本文采用三次B样条函数拟合法并推广至三维,即可得到B样条曲面函数。
2 隧道三维激光扫描轮廓检测算法
2.1 设计面法线计算
在已有拟合曲面的基础上计算超欠挖,首先需要建立以设计图为标准的设计曲面,通过计算设计曲面与实际拟合面上相对应点的距离来计算超欠挖值,设计面上设置的点称为检测点,拟合曲面上相对应的点称为实际检测点。由于隧道设计断面是由不同圆心不同半径的各个圆弧组成,因此确定检测点与其对应的实际检测点的距离可以通过在设计曲面的检测点上建立法向量,该法向量与实际拟合面的交点即为实际检测点。
建立隧道设计面模型L0,表达式为
L0=f0(x,y,z)
(1)
在设计面上以一定间距布置检测点a(x,y,z),所有检测点的矩阵A为
(2)
式中:a1,1=(x1,1,y1,1,z1,1),a1,2=(x1,2,y1,2,z1,2), …,ai,j=(xi,j,yi,j,zi,j),x、y、z分别为该检测点的北坐标、东坐标、高程。

(3)
(4)
由于设计面L0为隐函数,对于隐函数F(x,y,z)有
(5)
(6)
则对于在设计面隐函数L0上过任意点a(x0,y0)的法线方程为
(7)
即可以得到每个检测点上基于设计面函数的法线。
设ai,j对应的法线方程为fi,j则可以计算得到设计面的法线矩阵F,则设计面法线见图 1。

图1 法线示意
(8)
2.2 法向量矩阵
联立法向量矩阵F与拟合面方程则可计算出法向量矩阵F与拟合面交点b(x,y,z),并得到实际检测点矩阵B为
(9)
利用空间两点间距离公式计算相对应的检测点与实际检测点之间的距离,即可以得到该点处差值c为
(10)
建立差值c的矩阵C为
(11)
2.3 超欠挖量计算及位置判断
输入隧道中心线函数,分别计算相对应的检测点与实际检测点与中心线距离,认定实际检测点离中心线距离大于检测点离中心线距离时为超挖,反之则为欠挖。检测点法线计算示意图见图2。

图2 检测点距离
设计面上检测点a与对应拟合面上实际检测点b分别距中心线线l:y=z=0的距离为d1和d2,当d1
对进行超欠挖判断后点的法向量矩阵C赋予正负号,对某一断面上所有正值进行累加即可得到超挖值,对负值进行累加得到欠挖值。因此,通过Matlab进行拟合成函数并进行计算,即可得到超欠挖的数据。超欠挖计算的流程见图 3。
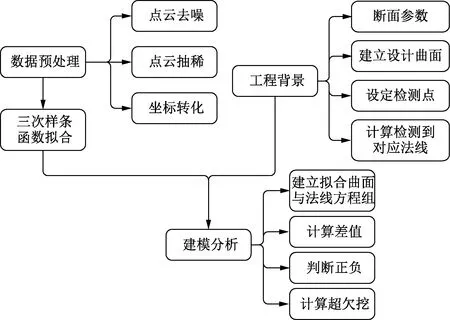
图3 超欠挖流程图
3 工程实例应用
3.1 工程背景
雷草山铁路隧道采用新奥法原理组织施工,其起讫里程为DK135+049—DK137+853.5,其中Ⅴ级围岩浅埋偏压段采用台阶临时仰拱法,Ⅳ级围岩采用台阶法,Ⅱ、Ⅲ级围岩采用全断面法进行施工。隧道的设计速度目标值为80 km/h,满足普货运输条件。由于新奥法开挖隧道采用光面爆破,隧道的开挖面较难控制,超欠挖情况出现较多,因此对该开挖隧道进行超欠挖检测数据对于实验的说明具有代表性。
3.2 设计曲面建立


图4 设计曲面模型
3.3 点云数据预处理
使用k邻域去噪法和最小二乘去噪法分别去除点云中的体外与体内噪点。去噪前后的点云图效果见图 5。

图5 点云去噪前与去噪后对比
由于隧道内点云曲率变化率较低,产生突变的情况较少,因此选用按距离对点云进行抽稀,点云间距选用5 cm,既可以保证其点云精度,又极大地减少了运算时间,便于后期的内业操作。
经过去噪和抽稀后的点云已经可以拟合出较为精准的函数曲面,为了简化计算量,对点云数据按里程进行分段后,把初始里程断面与坐标系YZ平面重合。坐标转换之后,所有点的X坐标就可以用于表示其所在里程的断面,便于快速确定某处超挖或欠挖的位置。
3.4 超欠挖计算
选取上文所述方法对各段经过去噪、坐标转换后的点云构造拟合函数,拟合后点云函数见图 6。

图6 拟合后点云函数
以K136+200里程断面为例,进行该断面的超欠挖位置判断。在断面上按角度分出的75个检测点中取6个检测点进行计算分析。依次取第10、15、30、45、60、65号点进行超欠挖判断,监测点位置见图 7。分别计算6个检测点至隧道中轴线距离d1,检测点相对应的实际检测点至隧道中轴线的距离d2,计算值与超欠挖判断见表1。
使用VanetMobiSim去设置网络拓扑以及车辆的运动模型,然后用NS-2去进行网络仿真,验证本文提出的RAR路由协议的性能.
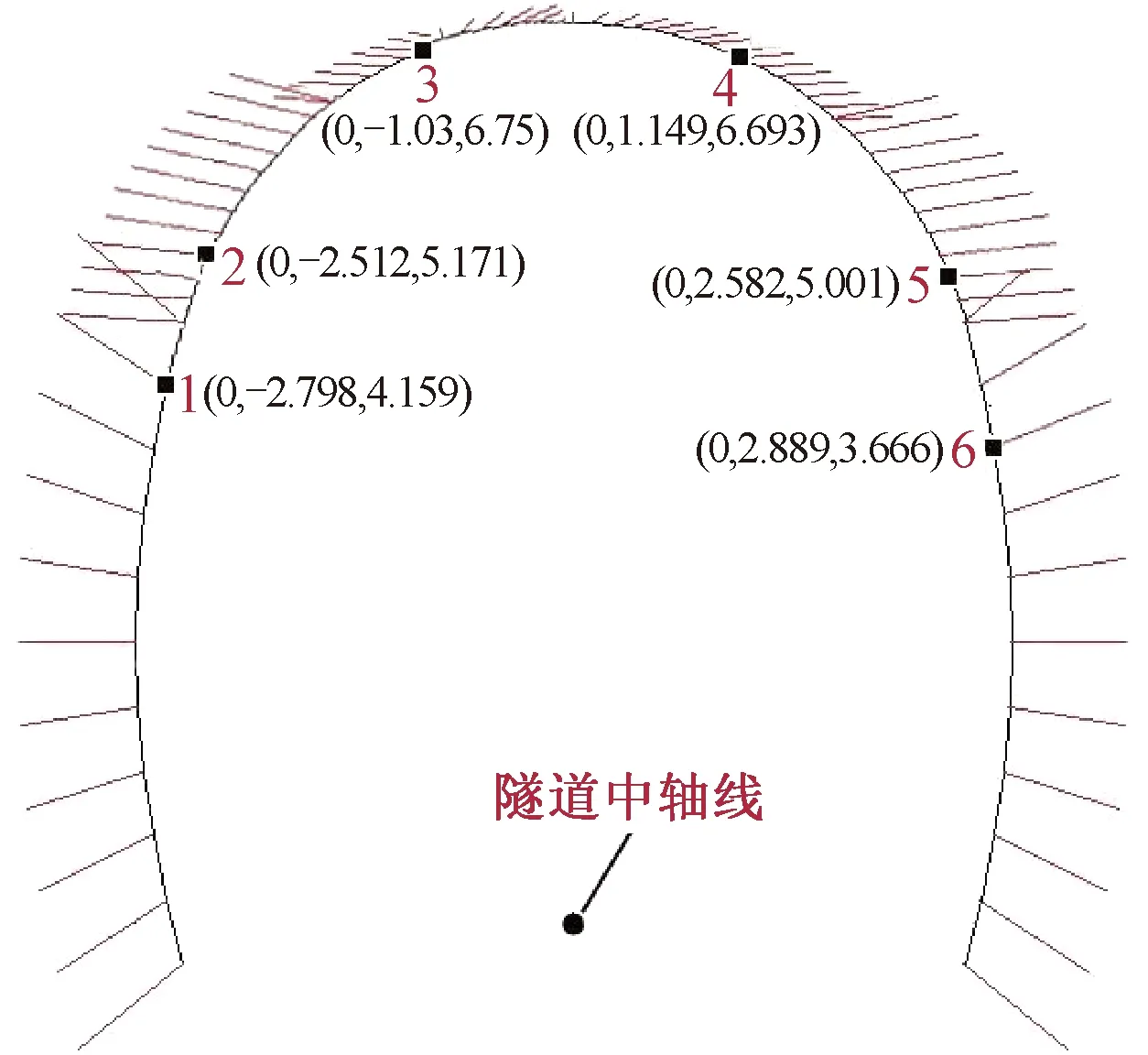
图7 检测点示意(单位:m)

表1 超欠挖判断
由表1可知,对比d1与d2的大小关系可以判断出在某检测点处隧道断面处于超挖还是欠挖状态,当拟合面处于设计面外时,即d1
3.5 超欠挖计算值结果对比
在雷草山隧道KD136+200—KD136+320里程段中每1 m取一个断面进行函数拟合的超欠挖计算,再对比现场全站仪检测数据和安伯格隧道(Amberg Tunnel)测量软件中所计算值,分析本文所述的计算方法是否适合工程应用。
(1) Amberg Tunnel计算方法及原理
导入处理好的点云数据,并把各站扫描的点云进行拼接组合。在Amberg Tunnel施工选项中输入隧道平竖曲线的设计参数、断面设计参数和控制点坐标等数据。软件采用最小二乘法拟合出隧道断面曲线进行超欠挖计算。
(2) 现场采用全站仪检测的方法
在隧道断面上选取30~50个检测点,点数根据现场情况确定,使用全站仪对所有检测点进行定位,获取其三维坐标,计算每个检测点相较于设计面轮廓线的偏差值。
现场检测断面间距为1 m,因此对比实验数据采用隧道里程KD136+200—KD136+320之间每1 m间距取1个断面,共121个断面的计算数据。
根据三种计算方法分别计算121个断面所得超挖与欠挖数值对比见图8,并选取部分重要数据见表2。

图8 三种计算方法的超欠挖数值对比
由表2可知,三种方法均可以表现出隧道开挖的情况,在隧道K136+236—K136+242里程段、K136+268—136+276里程段、K136+300—K136+303里程段分别有避车洞与避人洞,因此超挖数据有明显上升,并且欠挖数据有所下降。而对于其余位置,本文采用的拟合计算方法均达到了较好的精度,同时具有较快的计算效率。由于全站仪检测方法受检测点布置方式的影响,超挖变化较为不明显。由于在拱脚处均存在大量超挖土方,但全站仪测点未布置在拱脚处,因此超挖面积偏少。
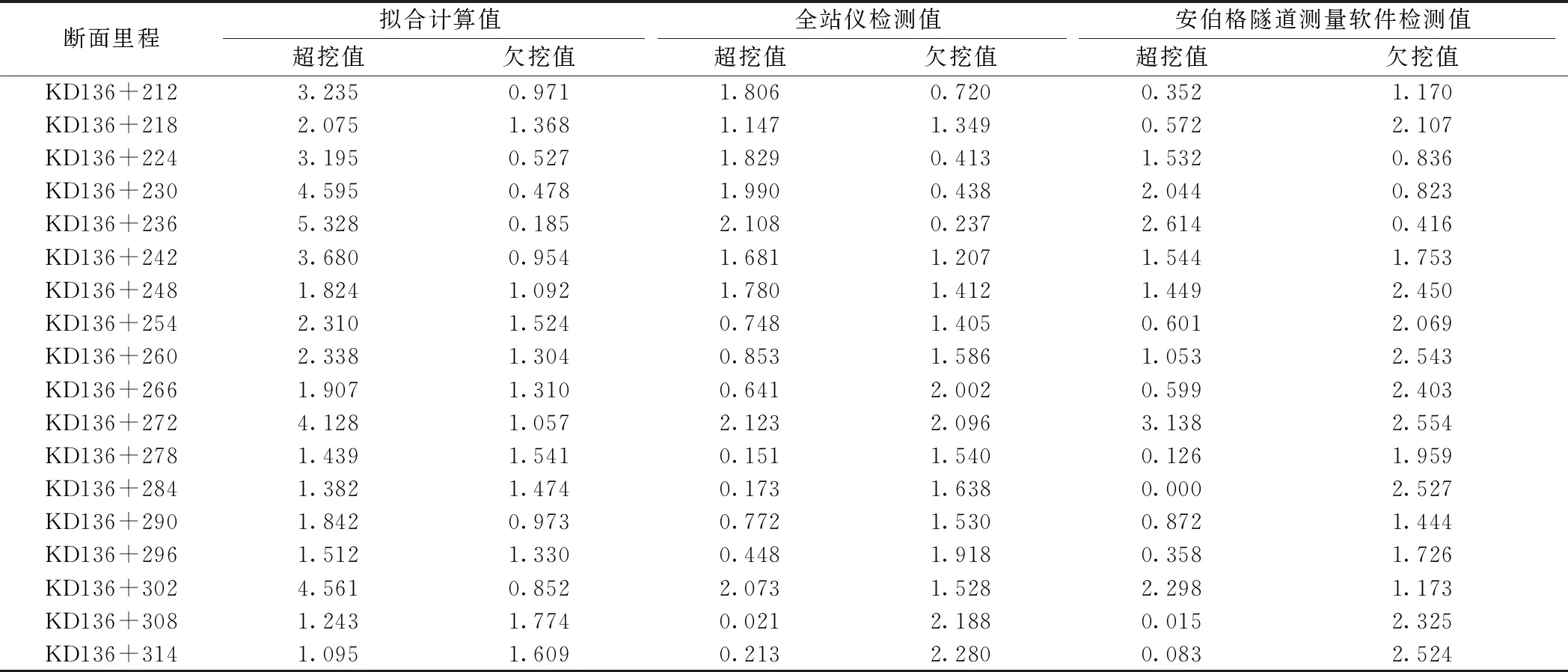
表2 三种计算方法的超欠挖值对比 m2
因此,三种测量方法均能表现出隧道超欠挖情况。同时三维激光扫描方法计算更简便,相比采用传全站仪的观测方法,使用Matlab等计算机语言编译程序实现算法的编程即可对隧道数据进行批量处理,并且扫描数据更全面,其基本计算单位的划分更为精细,并且在120 m连续断面的超挖与欠挖计算结果中,可以表现出与传统测量方法相似的趋势,并且在测量范围上较传统检测方法更为全面,因此,运用在隧道工程的超欠挖计算中具有可行性。
4 结论
本文研发了一种基于三维激光扫描的隧道超欠挖检测分析方法,在对点云进行去噪、抽稀及坐标转化后,采用三次样条点云曲面构造可以对隧道庞大的点云数量进行全方位的模型建立,通过设计面的输入,精确计算出超欠挖面积、体积等。
对在建的雷草山隧道进行实时的扫描监测,以KD136+200—KD136+320里程段的隧道进行了双三次B样条拟合法的超欠挖的扫描和计算,并将计算结果与传统全站仪扫描法和Amberg Tunnel软件的超欠挖结果进行了对比分析,法向量矩阵计算方法相对于原有的断面超欠挖计算方法,其基本计算单位的划分更为精细,表现出与传统测量方法相似的趋势,证明了其在工程应用中的可行性。
猜你喜欢
现代苏州(2022年9期)2022-05-26 01:34:49
文萃报·周五版(2022年9期)2022-03-11 00:24:12
摄影之友(影像视觉)(2020年4期)2021-01-09 10:10:10
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
制导与引信(2017年3期)2017-11-02 05:17:02
计算机测量与控制(2017年6期)2017-07-01 16:23:28
摄影之友(影像视觉)(2017年3期)2017-04-28 02:34:31
摄影之友(影像视觉)(2016年5期)2016-09-13 02:37:47
电测与仪表(2016年9期)2016-04-12 00:29:52