
童车变身网红买菜车(一)
2023-02-07 13:37:03史泽辉
电脑报 2023年4期
史泽辉
在短視频平台刷到有人遥控小车去买菜取快递,还能远程查看监控画面,远程对讲,引得路人纷纷驻足。今天,我们就用树莓派来亲手打造一辆属于自己的网红买菜车。
一、实现原理
遥控车大都用2.4G 信号遥控,有效距离仅几十米,这远远不能满足我们的需求。 要想实现远距离遥控,就得用到物联网平台在两个树莓派之间做中转。发射端树莓派发送主题为“转向”的话题消息,内容为“前进”“后退”“左转”“右转”。接收端订阅“转向”话题,当收到消息后判断内容,输出信号到电机驱动模块,控制驱动电机和转向电机做出相应的动作。
二、器材准备
除了一辆闲置童车和必需的维修工具,我们还要准备好以下器材:
三、硬件改装
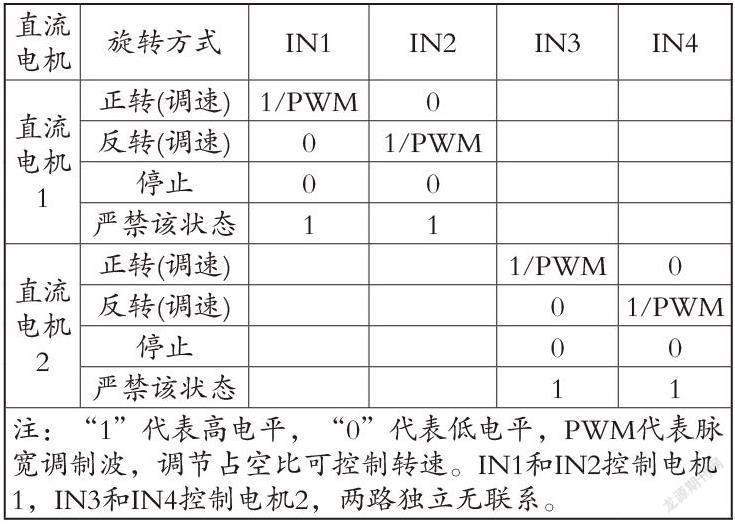
扔掉童车原来的控制板,找到转向电机和驱动电机的线,接在我们自己准备的电机驱动板上。树莓派扩展板5、6、12、16 号端口分别接电机驱动板的IN1、IN2、IN3、IN4。电机驱动板从小车原来的12V 电瓶取电,树莓派从充电宝取电。接线方法如图1:

把接收端树莓派安装在小车的发动机仓里,固定好。实物接线如图2、图3:
四、程序编写
登录古德微机器人编程平台www.gdwrobot.cn。
1. 发射端树莓派程序
建立四个子线程,名称分别为“前进”“后退”“左转”“右转”,并创建相应的函数。设置物联网服务器为www.gdwrobot.top,端口为1883。因为我们在古德微平台编程的时候已经有设置物联网服务器为www.gdwrobot.top,端口为1883。因为我们在古德微平台编程的时候已经有独立的账号和密码,这里留空即可(图4)。
在四个子线程函数里,我们设置当相应按钮按下,发送主题为“遥控”内容分别为“前进”“后退”“左转”“右转”的消息到接收端树莓派(图5)。
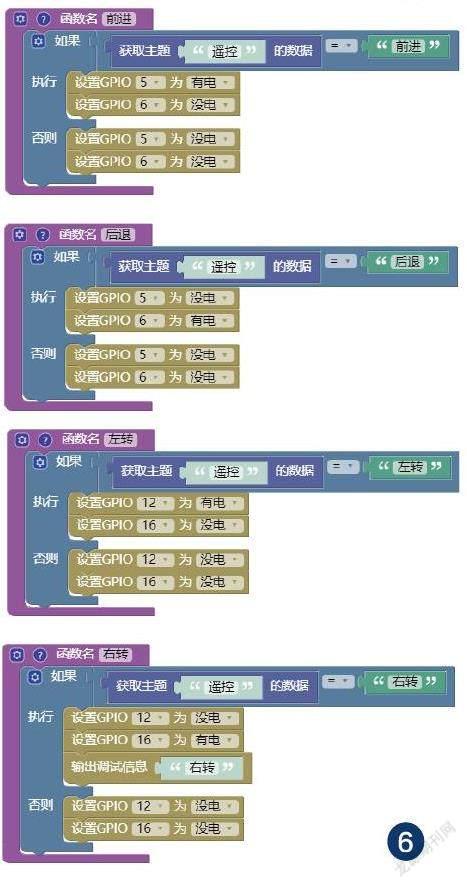
2. 接收端树莓派程序
同样设置物联网服务器为www.gdwrobot.top,端口为1883。监听主题为“遥控”的消息。当收到新消息,判断内容,做出相应的动作(图6)。
直流电机驱动逻辑表
五、远程监控
远程遥控小车必须依靠实时观看车辆周围的情况才能实现,可以利用图传模块来实现。这里我们采用现成的网络监控摄像头。把摄像头固定在小车适当位置,用充电宝供电,连接随身WiFi提供网络。在发射端利用手机上安装的网络监控APP 查看实时画面。
本期我们利用了现成的图形化编程平台实现了远程遥控车辆,接下来我们将学习如何利用物联网云平台自己部署并制作手机APP 来实现无限距离遥控小车,敬请期待。


发射端

接收端


猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
汽车实用技术(2022年5期)2022-04-02 09:36:22
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:38
新能源科技(2021年6期)2021-04-02 22:43:34
科学技术创新(2021年7期)2021-03-23 06:37:42
电子制作(2019年11期)2019-07-04 00:34:32
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
电子制作(2017年17期)2017-12-18 06:40:43
中国酿造(2016年12期)2016-03-01 03:08:19
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
