静站式与移动式三维激光扫描的精度对比分析
2023-02-07 03:09陈富强
地理空间信息 2023年1期
陈富强
(1.河南省地质局矿产资源勘查中心,河南 郑州 450006)
三维激光扫描又称实景复制技术,是测绘领域继GPS之后又一次技术革命[1]。与传统测量方法相比,三维激光扫描具有操作简便、自动化程度高、工作效率高、精度高、非接触式等一系列优点[2]。目前,三维激光扫描技术已广泛应用于地下工程变形监测、铁路勘探、数字化城市建设、考古研究等领域[3-6]。
传统的隧道变形监测方法主要包括测距仪法和全站仪法两种,但这两种方法都具有比较明显的缺陷:①监测点数量受到限制,不能全面反映隧道整体的变形情况;②监测周期相对较长,外业工作量大,获取的监测数据相对滞后;③传统方法对作业环境要求较高[7-8]。三维激光扫描技术作为全新的测绘学科技术,已在变形监测领域取得了丰硕的研究成果[9];但从国内外学者的研究现状来看,目前关于三维激光扫描技术在地铁隧道变形监测领域的研究成果主要集中在利用地面静站式三维激光扫描技术[10],由于地铁隧道具有超长线状结构,该方法需要设站、换站,工作量较大,且无法很大程度地提高外业效率,数据获取相对滞后。基于轨道小车的移动式三维激光扫描技术弥补了静站式的不足,这将是地铁隧道变形监测技术的一大革新[11-12],但问题在于这种新技术目前国内鲜有研究。本文利用静站式与移动式三维激光扫描分别对控制点坐标进行提取,并对其应用成果进行精度评定,旨在为今后三维激光扫描在隧道监测中的应用提供参考依据。
1 三维激光扫描的组成与简介
三维激光扫描系统主要由扫描模块、控制模块和计算机模块3个部分组成,其中扫描模块主要包括激光测距和激光扫描;控制模块通过计算机总线控制扫描模块和测距模块来保证扫描工作的正常进行;计算机模块通过系统指令的方式来控制仪器工作,并存储测量数据[3]。
三维激光扫描仪工作时通过马达的快速旋转来转动扫描仪头部,从而开始扫描作业,同时扫描仪内部激光发射器发射激光,经待扫描物体反射后激光回到扫描模块,被扫描模块中的接收器接收,根据扫描的角度和反射时间推导出扫描仪与待扫描物体的距离,再结合扫描仪自身三维坐标信息计算得到扫描点的坐标信息。外业数据采集过程中,每台三维激光扫描仪都采用独立坐标系,扫描仪的中心点为坐标系原点,X轴与Y轴相互垂直,位于水平扫描视场,Z轴垂直于X、Y轴构成的平面,位于竖向视场,如图1所示。
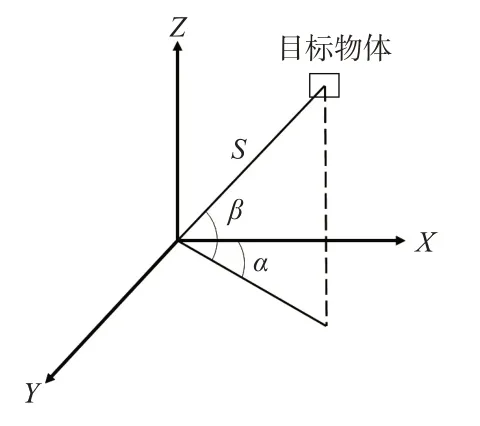
图1 三维激光扫描原理图
根据图1中的几何关系,可得到目标物体的三维坐标计算公式,即
式中,S为扫描仪到物体的距离;α、β分别为水平向扫描角度和竖向扫描角度。
1.1 静站式三维激光扫描
静站式三维激光扫描由激光扫描仪和数码相机组成,其作业架站方式与全站仪作业类似。静站式三维激光扫描可对特定目标区域数据进行快速采集,再通过处理采集数据建立目标区域的三维模型。静站式三维激光扫描仪具有使用方便、快捷、价格便宜、精度高等优点,在外业作业过程中,通过不同测站对不同目标区域进行数据采集,再通过公共区域的扫描对不同测站采集的数据进行融合,从而建立目标区域的三维坐标信息。外业作业流程如图2所示。

图2 静站式三维激光扫描
1.2 移动式三维激光扫描
与静站式三维激光扫描相比,移动式三维激光扫描的系统更加复杂,主要由三维激光扫描技术、数字摄影测量技术、导航与定位技术组合而成。目前,移动式三维激光扫描主要依托于车载、船载和机载等移动工具进行外业扫描作业,可适应不同作业环境、快速高效获取目标信息,具有效率高、速度快但价格昂贵的特点。
2 三维激光扫描作业流程
三维激光扫描作业流程主要包括外业扫描作业和内业数据处理两部分,外业扫描作业主要是数据采集工作,内业数据处理主要包括坐标转换处理、点云数据拼接、点云数据融合、点云数据降噪以及结果的可视化输出等步骤。数据处理流程如图3所示。
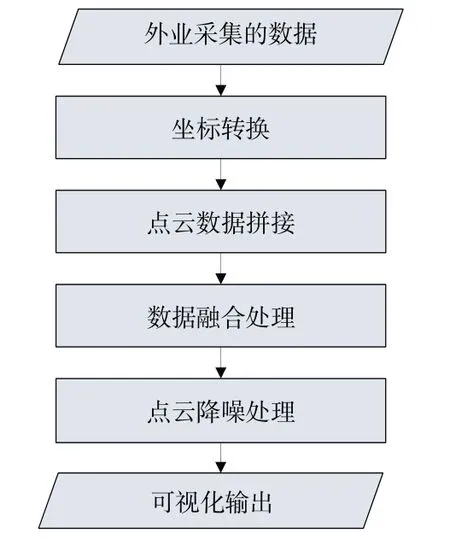
图3 数据处理流程图
在外业数据采集的过程中,三维激光扫描仪扫描的点云仅是点与点之间的相对位置关系,因此在内业数据处理过程中需先进行坐标转换,将相对位置关系转换为绝对位置关系。点云数据拼接是把外业采集的数据拼接成一个整体的过程。外业数据采集过程中,各测站往往会使用独立坐标系,因此采集的位置关系都是相对坐标。点云优化是指对外业重复采集的数据进行筛选、剔除,再进行数据融合和降噪处理。
静站式三维激光扫描内业数据处理需对坐标进行转换与数据拼接,通常通过扫描公共区域进行点云坐标转换,采用七参数模型,即

式中,[ΔXΔYΔZ]T为平移参数;[ξXξYξZ]T为旋转参数;m为尺度参数。
移动式三维激光扫描内业处理时,首先对外业数据进行预处理,再设置扫描角度、反射率等参数以及断面参数信息,最后对同一断面内的数据进行联合平差处理,使三维坐标信息可靠。
3 案例分析
本文以全站仪测量平面控制点坐标为参考值基准,对静站式和移动式三维激光扫描仪测得的控制点坐标进行精度评估。静站式与移动式三维激光扫描精度的对比分析结果如表1和图4所示,可以看出,静站式三维激光扫描控制点的坐标精度整体上优于移动式三维激光扫描的精度;X方向上静站式与移动式三维激光扫描的最大偏差分别为5.9 mm和9.9 mm;Y方向上静站式与移动式三维激光扫描的最大偏差分别为5.6 mm和9.7 mm,且6号点的静站式偏差大于移动式偏差;H方向上静站式与移动式三维激光扫描的最大偏差分别为5.6 mm和10.0 mm;静站式三维激光扫描仪测得的控制点坐标偏差平均值分别为4.32 mm、4.84 mm和4.49 mm,均达到毫米级的精度;移动式三维激光扫描仪测得的控制点坐标偏差平均值分别为7.59 mm、7.37 mm和8.00 mm,但最大偏差值超过了10 mm,因此移动式三维激光扫描只有厘米级精度。
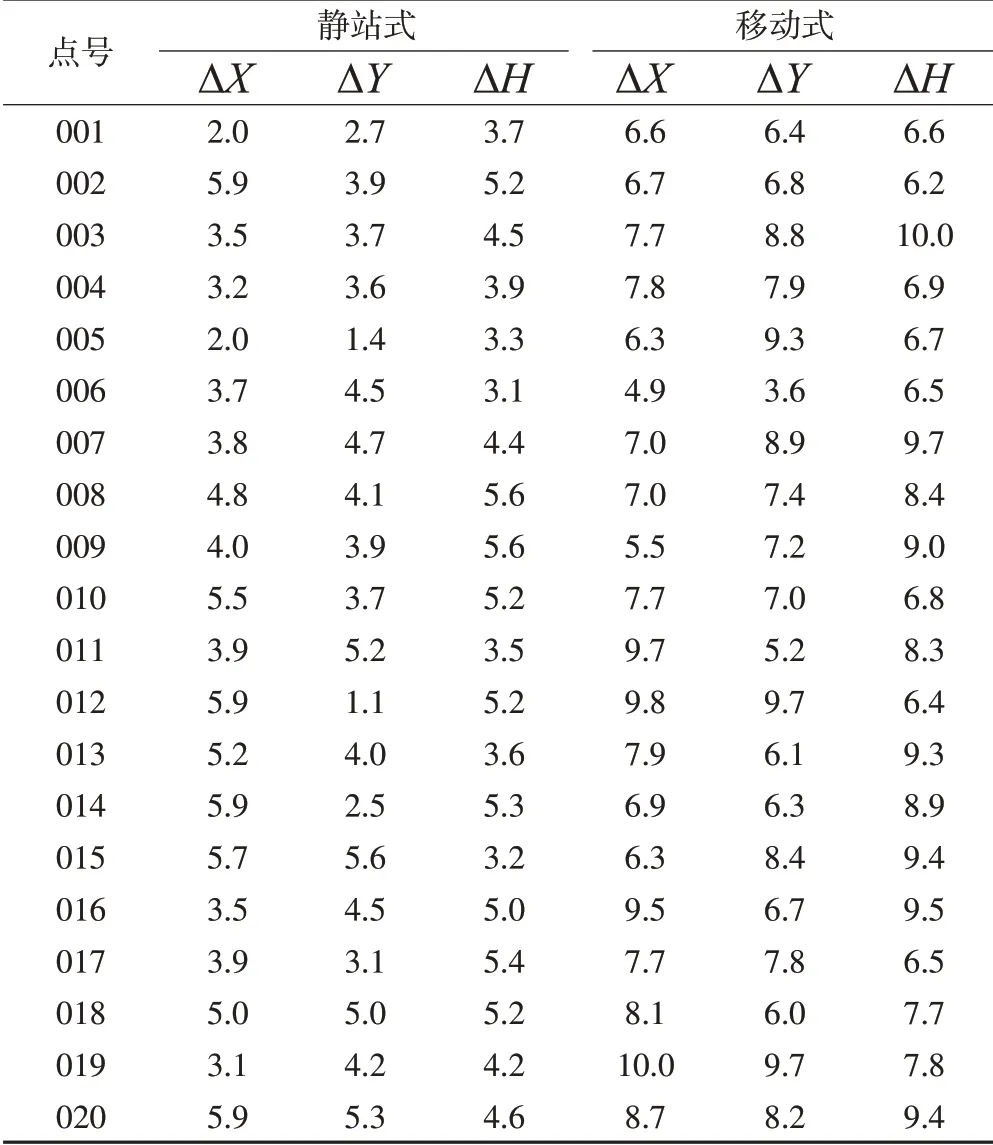
表1 静站式与移动式三维激光扫描精度对比分析
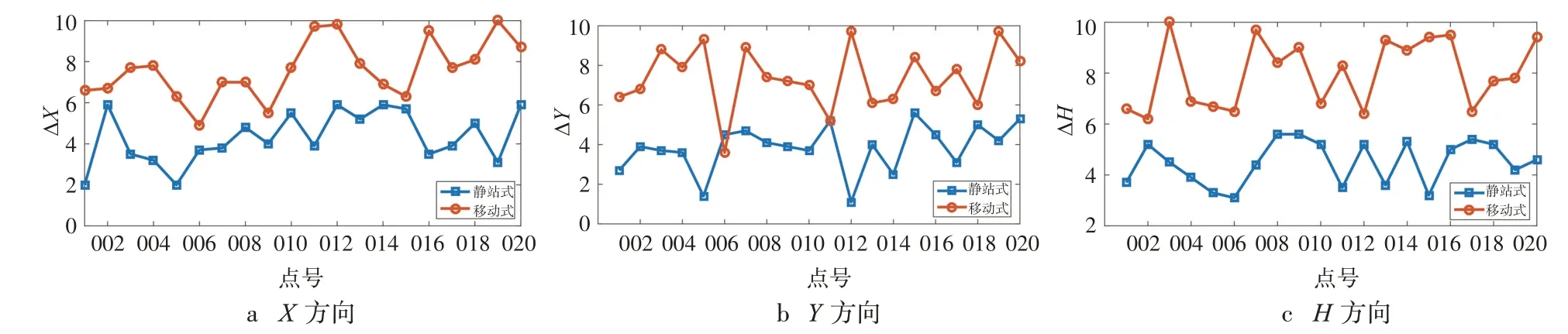
图4 不同扫描方法控制点与参考值的偏差
4 结语
本文以全站仪测量平面控制点坐标为参考值基准,对静站式三维激光扫描和移动式三维激光扫描进行精度评估。实验结果表明,静站式三维激光扫描精度优于移动式三维扫描,静站式三维激光扫描达到毫米级精度,而移动式三维激光扫描只有厘米级精度。本文实验结果可为今后使用三维激光扫描对地下工程进行变形监测和病害监测提供参考依据。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
西部交通科技(2021年9期)2021-01-11
中国特种设备安全(2019年10期)2020-01-04
模具制造(2019年3期)2019-06-06
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
电子制作(2017年17期)2017-12-18
中国房地产业(2016年2期)2016-03-01
肿瘤预防与治疗(2015年1期)2015-09-26
现代营销·经营版(2015年3期)2015-04-20