地面气象观测站探测环境倾斜摄影评估方法
2023-02-07 03:09方海涛赵宝义
地理空间信息 2023年1期
方海涛,赵宝义,汪 玮,章 超
(1.安徽省大气探测技术保障中心,安徽 合肥 230031)
各类气象观测资料的代表性、准确性和连续性不仅取决于观测仪器、观测方法和观测人员技术水平,也依赖于观测仪器所在的环境状况。客观、定量地评价气象站的探测环境状况及其代表性,对于了解观测数据来源,设计观测数据质量控制方法,提高气象预报预测服务水平,具有重要意义。国家标准GB/T 31221-2014《气象探测环境保护规范地面气象观测站》和GB/T 35219-2017《地面气象观测站气象探测环境调查评估方法》提出了对探测环境的基本要求和评估内容。
2010年以来,我国民政、国土、规划等部门先后引进倾斜摄影测量技术生成特定区域的三维模型用于环境调查评估[1]。国家地面气象观测站气象探测环境调查评估主要包括地形、控制区内障碍物情况、观测场四周500 m范围内影响源等内容。目前,我国气象部门主要通过综合气象观测技术人员不定期手工测绘探测环境,数据整理过程繁杂,测绘自动化和评估方法信息化程度有待进一步提高。利用倾斜摄影测量技术建立气象观测站探测环境三维模型,以大范围、高精度、高清晰的方式全面感知复杂场景,直观反映地物的外观、位置、高度等属性,可提高测绘效率和评估结果的准确性。气象探测环境辅助评估方法包括遥感影像处理、三维模型展示调用和探测环境周边障碍物自动检测分析。辅助评估的主要步骤为:①利用倾斜摄影测量技术,采集地面气象观测站周边环境的三维数据,经数据后处理,形成标准的OSGB三维数据;②建立三维测绘模型展示平台,具备空间量测与白模绘制功能,可进行三维模型的放大、缩小、平移、漫游、全图显示等操作;③设置空间视点,针对周边三维模型中的障碍物,自动检测仰角、斜距、平距等参数。
1 地面气象观测站探测环境评估方法
1.1 探测环境要求
地面气象观测场边缘与成排障碍物的距离至少是该障碍物高度的10倍以上,与四周孤立障碍物的距离至少是该障碍物高度的8倍以上,两孤立障碍物的横向距离不得小于30 m。倾斜摄影测量获取的多角度、大范围地物影像包含地物顶部数据,可用于地面气象观测站周边障碍物的测绘分析。
1.2 障碍物距高比计算方法
设a为观测场北边围栏中点与障碍物至观测场中心点连线与围栏交点的距离,b为障碍物至观测场中心点连线与围栏的交点与障碍物至观测场围栏(或延长线)的垂直点的距离,c为障碍物至观测场围栏(或延长线)的垂直距离。如图1所示,对于①类障碍物,a=CE、b=ED、c=AD;对于②类障碍物,a=CG、b=GK、c=BK。基于观测场中心h高度处测得的障碍物最高仰角(β)、斜距(L)、最高仰角的方位角(α)和常数r(12.5 m,即标准观测场边长的一半),可通过换算获得障碍物至观测场围栏地面最近点的距高比R。
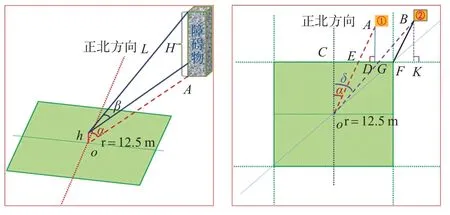
图1 探测环境周边障碍物距高比测算示意图
当a+b≤r时,则为①类障碍物,当a+b>r时,则为②类障碍物,R=根据障碍物最高点方位角的值域不同,a、b、c的计算各不相同。
2 辅助评估的主要方法和技术要求
地面气象观测站探测环境评估的核心方法为通视分析[2-4]和可视域分析[5-7],其中通视分析是以某一点为观察点,另一点为目标点,研究点之间的通视情况,主要包括Janus、Dynatacs、Bresenham等算法;可视域分析是从一定相对高度的观察点开始,在一个区域内可观察到的地表范围,其本质是两点之间通视计算在面域上的实现。以倾斜摄影测量生产的DSM栅格数据为基础,采用双线性内插实现两点之间的通视分析;选择参考面算法,以观察点与目标点之间的空间关系形成的参考面来判断是否可视。
2.1 倾斜摄影三维测绘
针对气象观测站周边环境,利用无人机航空摄影三维建模,采用国家2000大地坐标系和1985国家基准高程,结合商业三维引擎进行二次开发,提供相应数据库接口。无人机航空摄影气象观测站周边环境的外业测绘范围可按台站级别分为4 km×4 km、2 km×2 km、1.6 km×1.6 km。软件的结构组成如图2所示,主要功能为:
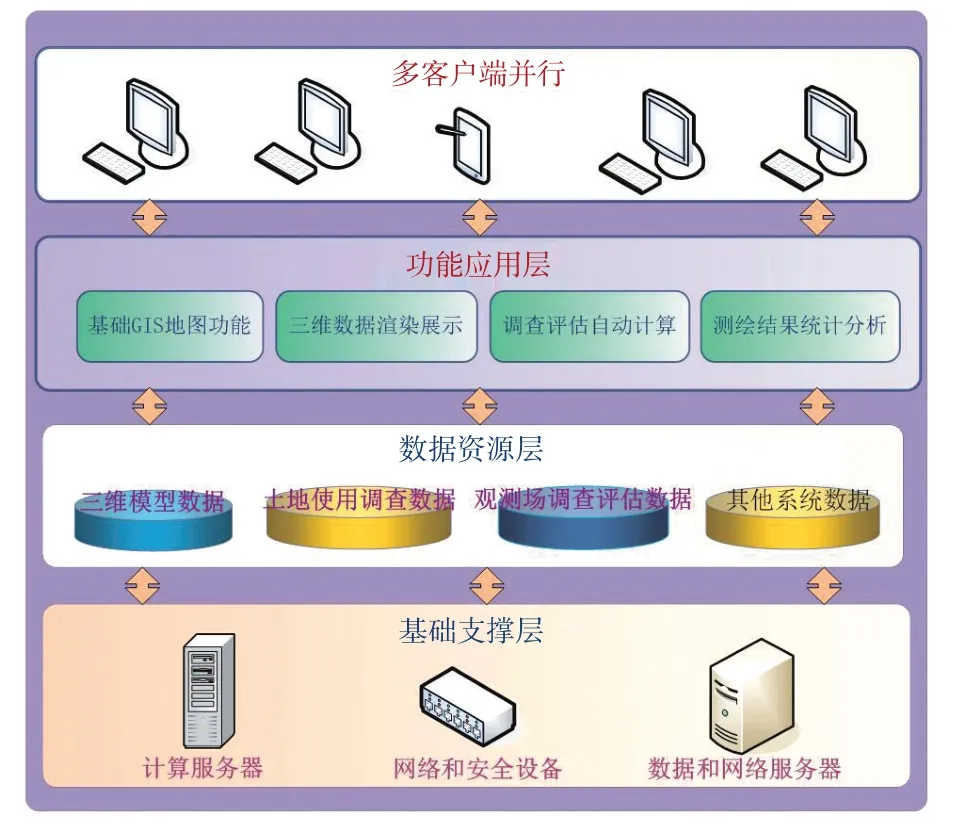
图2 探测环境辅助评估系统结构示意图
1)基础GIS功能模块。地图是气象观测站点空间定位的基础,可叠加展示矢量数据与正射影像数据,包括对观测站点周边环境的三维模型进行放大、缩小、漫游、全图显示、测距、测面等。
2)气象观测站三维渲染浏览功能模块。利用三维引擎平台进行二次开发,渲染、浏览和展示气象观测站周边环境三维成果数据。三维模型需与0.5 m分辨率影像图基本套合,地面分辨率优于0.08 m,无明显的错位、扭曲、拉花现象,垂直分辨率不小于0.5 m。
3)障碍物自动识别功能模块。在三维模型上,对观测站四周区域内障碍物360°范围进行距离和角度量测,包括高差、倾斜距离、水平距离、方位角、倾斜角、水平角和任意多边形面积。
2.2 障碍物测算方法
以观测场中心为观测点,以800 m、1 000 m、2 000 m为方形观测范围,以2°为观测单元,记录观测场中心周围360°的地形、建筑、植被观测视线最高点相对于观测场中心的仰角、斜距,并计算距高比。测算内容是获取每2°视宽范围内3种对象(地形、植被、建筑)的最大仰角,并不是正好在2°、4°的水平刻度所观测的仰角。具体量算方法为:
1)以观测场中心1.5 m高处为视点,记录周围2 000 m方形范围内的障碍物相对于视点的计算要素,包括障碍物名称、障碍物边界与观测场中心点的起终方位角、障碍物视宽角(起终方位角之差)。
2)以观测场中心为视点Ha,获取视宽角内所观测的目标障碍物独立模型上最大仰角的点Hz,记录Hz相对于Ha的方位角、仰角和斜距。
3)以Ha-Hz为斜距,获取Ha-Hz的二维投影线LineH,将LineH与围栏地面进行叠加判交,获取围栏地面处交点Hw,记录Hz相对于Hw的斜距、仰角和距高比。
4)根据视宽角确定视口宽度,视口高度在0~60°区间,确定当前视窗大小,将DSM(包含地表建筑物、桥梁和树木等高度的地面高程模型)中大地水准面对应的部分高亮着色(如红色),其余的普通着色(如灰色),分别投射到视窗中,形成二维图形(类似天际线)。若灰色完全遮挡红色,则可判断出现视觉遮挡;若无遮挡,则取红色二维投影上的最高点,并获取该点相对于整个视宽角所占的角度,如有多个点,则选取最左边的最高点,以视点中心为基础,获取大地水准面对象上的真实最高仰角点三维坐标。
2.3 气象探测环境倾斜摄影测绘技术要求
本文采用的主要设备为大疆M600PRO无人机搭载RIY-d2相机,也可采用性能相近的其他硬件平台。该系统由无人机、数码相机、动态姿态感应控制云台、航摄计划设计软件和飞行管理系统等部分组成。飞行参数包括相片重叠度、相片倾角、相片旋角、摄区边界覆盖等。航摄时,航向重叠度一般为60%~80%,旁向重叠度一般为15%~60%;相片倾角不大于12°,出现超过8°的片数不超过总数的10%;在确保航向和旁向重叠度满足要求的前提下,个别最大旋角不超过30°,超过15°旋角的相片数不得超过分区相片总数的10%;航向覆盖超出摄区边界线至少两条基线,旁向覆盖超出摄区边界线不少于像幅的50%。
1)像控测量精度。根据CH/T 3006-2011《数字航空摄影测量控制测量规范》的相关要求,采用GPS RTK或基于HBCORS系统的GPS测量方式布测野外像控点,控制点高程采用已有的控制成果进行高程拟合,形成基于国家2000大地坐标系的相片控制测量成果。按照GB/T 7931-2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量外业规范》要求,平高控制点相对于邻近基础控制点的平面位置中误差不超过地物点平面位置中误差的1/5;高程控制点相对邻近基础控制点的高程中误差不超过基本等高距的1/10。
2)像控点的布设。测区像控点采用区域网加桩点(高程和三维坐标)的作业方式[8]。高程控制点测量按照平高控制点测量方法,同时提供平面坐标。地标是直径为1.5 m的圆形标志,避免像控点有投影变形差。像控点选择在影像明显的线状地物交角,高程急剧变化的斜坡不宜作为选点目标。当控制点选择在植被、高出地面或陡坎等地物边缘时,需量注点位至地面的比高。
3)像控点联测。针对无人机倾斜摄影数据的特性,在Smart3D Capture开发环境中采用多视角影像联合平差法,模拟包括倾斜影像在内的所有影像的地表投影范围,再采取由粗到精的金字塔匹配策略,在各级影像上进行同名点自动匹配和自由网光束法平差。通过建立连接点和控制点坐标文件,实现多视角影像自检校区域网平差迭代计算;通过多次反复联合解算,最终得到符合精度要求的平差结果。
3 气象探测环境三维测绘模型与实际效果
Smart3D Capture在三维重建过程已能实现全自动计算,依据内部规则算法,自动选择在对面视角上的最佳像对模型,形成三维尺度的密集点云;然后点云自动转换为不规则三角网(TIN)结构,同时将由于图像匹配错误而引起的TIN进行删除和修复,并基于内在几何关系对TIN模型进行平滑和优化,达到最佳的三维表达效果;最后根据三维TIN的空间位置信息,自动寻找最佳视角影像,并完成模型纹理的构建,形成完整且真实的三维模型体[9-10]。航飞影像的地面分辨率为3.0~5.0 cm。测绘模型浏览检查高度大于等于200 m时,模型不存在明显的拉伸变形。
倾斜摄影建模效果如图3、4所示,具体步骤为:

图3 桐城国家基准气象观测站探测环境三维测绘模型
1)建模区域初始化。根据探测环境评估的实际范围,划定建模区域,以长宽相等的正方形瓦片为划分的最基本单位,每个瓦片是三维建模的最小单元[11-12]。
2)三维像对建立。基于空三平差输出的外方位元素成果和相机安置位置关系,Smart3D Capture可自动寻找合适的两张影像组成三维像对。
3)像对点云生成。对瓦片内包含的所有三维像对分别进行点云匹配计算,并对这些像对点云进行汇总合并与过滤。
4)三维TIN构建。利用Smart3D Capture的独有算法对得到的点云进行三角网化处理,在这个过程中,一些异常的点由于无法构建正常的三角形而被作为粗差点舍弃[13]。
5)TIN优化。Smart3D Capture可对TIN进行自动检测评估,可对不合理的三角网表面进行自动优化,对平坦表面的三角密度进行自动简化稀疏处理,并对复杂表面的三角网密度予以保留[14]。
6)纹理匹配。Smart3D Capture可根据TIN中每个三角形的空间位置,自动映射最佳视角的影像作为模型纹理[15]。

图4 九华山国家气象观测站探测环境三维测绘模型
4 结语
倾斜摄影测量技术具有全面感知复杂场景的能力,可进行多角度、大范围的地物影像数据获取,获取的影像中不仅包含地物顶部信息,还包含侧面纹理信息。现有的倾斜影像后处理软件具有协同并行处理能力,可快速建立特定区域的三维测绘模型[16]。总的来说,基于倾斜摄影测量技术的三维建模方法适用于气象站点探测环境采集建模与辅助量化评分。
安徽省大气探测技术保障中心开发的气象观测站探测环境辅助评估系统的主要功能为:
1)气象观测站周边环境倾斜摄影三维测绘建模和全景照片加工。采用国家2000大地坐标系和1985国家基准高程生成气象观测站周边2 km×2 km范围内的三维测绘模型,并依据气象探测环境保护规范进行量化评估。
2)气象观测站周边土地使用情况调查。以高清卫星遥感影像数据为基础,分析观测站周边20 km环境范围内的土地使用情况,调查的图斑数据主要包括山地、水体、植被、农田、建筑、道路。
系统现已完成寿县、屯溪、桐城3个国家基准气象站和九华山、天堂寨、天柱山3个高山气象观测站的探测环境三维模型制作、障碍物测量、卫星遥感影像特征分析等工作。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
初中生世界·九年级(2020年2期)2020-04-10
铁道通信信号(2020年9期)2020-02-06
浙江国土资源(2019年10期)2019-10-31
创新作文(1-2年级)(2019年4期)2019-10-15
建材发展导向(2019年10期)2019-08-24
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12