农机条播作业监控系统功能设计和实现
2023-02-07 11:32赵建国
南方农机 2023年4期
赵建国
(潍柴雷沃智慧农业科技股份有限公司,山东 潍坊 261000)
条播作业,顾名思义就是作物播种的一种方式,即以长条的形状一条条地播种,主要针对小麦、棉花等作物或者一些用作饲料的牧草等。播种方式经历了从手动撒播到借助人力或者畜力拉动耧车播种,再到现代拖拉机带动标准化机械耧播种,目前发展到现代智能化条播、精播设备播种。每次技术的革新都提高了作业效率,解放了人力[1]。本文论述的条播作业监控系统可以高质量地完成播种作业,把作业亩数、每亩种子用量、株距和行距、作业速度等信息统计出来并上传国家平台,以便于国家统计粮食种植面积和补贴的申请。这极大地提高了播种作业质量和效率,有利于土地集约化管理。
1 条播作业监控系统总体设计和功能
1.1 系统总体设计方案
本条播作业监控系统主要由6 大功能组成:1)播种量实时值监测与统计量监测(亩播量)的监测功能;2)监测漏播、堵塞情况并报警的报警功能;3)带位置的定位功能;4)实时显示作业信息的显示及人机交互功能;5)终端出现故障时,能够以声、光、文字等方式向农机驾驶员提示的报警功能;6)记录作业数据、作业面积、作业轨迹、作业时长、播种量等数据,并将作业数据上传平台,由平台绘制播量云图,辅助分析作业质量的云平台功能。
农机条播作业监控系统包括作业面监控终端、TBOX 控制器和农机服务平台。作业面监控终端由监控显示屏、速度传感器、种子传感器、播种控制器组成[2]。
播种控制器是条播机的控制核心,接收来自速度传感器和种子传感器的信号,经过逻辑计算精确控制种子播撒量。作业监控显示屏安装于拖拉机驾驶室内,方便驾驶人随时观察实时的作业状态,让驾驶人可以根据情况实时调整作业参数或者根据提示排除作业中的故障问题。TBOX控制器是连接服务平台和作业面监控终端的桥梁,TBOX 接收来自作业面监控终端的信号,将其打包成一定格式通过4G 信号发送给远程服务平台[3],远程服务平台可以接收来自TBOX的数据,根据提前拟定的数据协议解析数据包。远程服务平台根据接收的数据,可以记录条播机的作业亩数、作业速度、种子消耗量、坐标位置、行驶轨迹等信息,能够提供数据存储、处理、查询和打印功能,通过平台分析可以优化后续的作业方案,提高作业效率和质量。条播作业监控系统结构如图1所示。
1.2 条播机实时监控功能
1.2.1 条播作业数据监控平台
条播机数据平台是由企业或者国家搭建的网络服务平台,其目的主要是实时接收、处理和保存农机的运行数据,包括拖拉机发动机和车身数据、农机具作业数据、地理位置、TBOX 终端状态等信息。
一般国家平台主要为了统计农业机械作业每年的收获情况,根据实际作业量进行国家补贴,便于国家掌握准确的农业生产情况。企业平台主要是为了服务用户,为用户提供可靠、人性化的服务体验,提供实时上传数据的统计、处理及保存功能,在作业过程中通过车载监控屏幕实时显示数据,在作业完成后自动或根据需要生成任务报表,呈现整个作业过程信息,为用户后续其他地块作业的改进优化提供依据,也可以为本地块下次作业提供参考[4]。用户可以使用手机端App 进行实时数据查看和历史数据查阅,对作业中出现的问题可以及时通过手机端App 的人机交互界面进行干预,可以远程控制作业状态,提高了工作效率和灵活性。

图1 条播作业监控系统结构
1.2.2 条播作业定位、路径生成及回放、计亩
条播作业过程中由TBOX 终端提供精准定位服务,TBOX 通过自身的定位模块,根据作业状态将定位坐标数据上传到监控平台。农机具使用过程中有作业状态和道路转移状态两种,这两种状态下要求的定位点位数是不同的,作业状态下要求精确点位,一般是每秒钟采集1 个坐标点位信息;转移状态下由于没有必要非常精确定位,通常10 s~20 s 采集一个点位信息[5]。每个定位点位与一个时刻的作业信息对应,这样在作业完成后,作业状态分布信息就可以生成出来,比如播种量分布云图。
条播控制器根据TBOX 终端提供的定位点位信息生成作业路径轨迹或者行驶路径轨迹,轨迹可以显示在监控屏幕上,便于用户查看农机运行轨迹,为优化作业路径提供了直观依据。通过生成的路径轨迹,结合计亩算法就可以比较准确地计算出作业地块的亩数[6]。同时还提供轨迹回放功能,可以回看作业路径轨迹,以此来分析作业过程,为后续优化作业轨迹提供数据支持。
1.2.3 条播作业人机交互和报警提示功能
监控屏幕也是人机交互的一个界面,通过监控屏幕可以设置条播机的作业参数,比如地轮直径、播种幅宽、传动比、测速齿数等[7]。人机交互还可以通过监控云平台下发指令对条播控制器进行控制和作业参数修改。这两种人机交互手段提高了作业运行中的操作灵活性,为提高作业质量和作业效率打下了技术基础。
监控显示屏界面能够提示作业过程运行状态是否正常,如卫星信号状态、4G 信号状态、条播控制器通信状态以及条播机每行作业的工作状态。条播机每行作业状态主要包括:各行播种是否正常,有无堵种、缺种等问题。如果出现异常问题,监控界面会在对应的区域显示红色故障报警提示。
2 条播作业监控系统田间试验分析
田间试验主要是为了验证设计的功能性及可靠稳定性,试验使用潍柴雷沃M2004 型拖拉机和自研条播机。其田间作业场景如图2 所示。

图2 条播机作业图
2.1 云平台功能测试
条播监控云平台上记录着所有条播作业机械的数据,可以调取任何一台条播机查看其实时和过去作业的数据信息。数据信息以时间轴顺序记录,包括作业中整机状态信息、定位信息、条播状态信息等[8]。条播状态信息包括作业地块信息(需要提前设置)、作业面积、播种总量、亩播种量、作业幅宽、作业时长、车队信息、机具型号、机手信息等。通过云平台,以实景地图的形式展现作业区域和作业轨迹,方便用户查看车辆实时作业位置和运行轨迹。云平台功能为大农场集约化农业作业管理带来了质的转变,为农场管理人员提供了集管理、控制为一体的智能解决方案。云平台界面如图3所示。
2.2 人机交互、实时监测和报警功能测试
条播机在作业过程中能够通过监控屏幕与现场农机操作人员进行交互,监控屏幕能够显示当前条播机的作业状态,并且能够修改作业机具的参数配置[9],显示如当前播种总量、亩播种量、每行播种状态是否正常等情况。参数可以配置条播幅宽、测速齿数、传动比等。条播控制器监控屏幕显示状态如图4所示,条播控制器参数设置界面如图5 所示。

图3 条播作业云平台界面

图4 条播控制器监控屏幕

图5 条播控制器参数设置
2.3 监控系统数据统计输出
在作业完成后,监控系统可以根据需要,输出相关的作业数据信息统计表,如表1 所示。这是对整体作业情况的展示,便于对比不同地块作业质量,分析影响作业质量的因素[10]。为了对比不同地块中某个作业要素的变化规律,可以以地块信息和需要观察的作业要素为坐标轴生成二维折线图,如图6 所示,这样可以直观地查看作业要素的走势和规律。

表1 条播机作业数据输出统计表
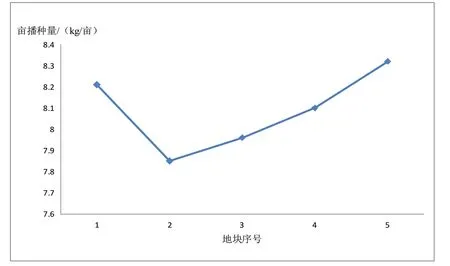
图6 不同地块亩播种量走势图
3 结语
本农机条播作业监控系统已经在山东区域几个大农场进行上万亩农田的作业测试试验。充分验证了条播机和条播作业监控平台的功能,作业面积、播种总量、单位播种量的精确度都达到了设计要求,友好的人机交互界面获得了用户的认可。作业数据导出和分析功能、路径生成和轨迹回放功能为后续更高效率、更高质量的作业提供了有力的数据支持[11]。随着本农机条播作业监控系统的不断推广与应用,其功能还将不断优化更新,以满足不同用户和不同应用场景的使用需求。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
新农民(2021年13期)2021-09-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
大麦与谷类科学(2020年2期)2020-06-01
今日农业(2019年14期)2019-09-18
农业知识(2018年33期)2018-09-26
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
筑路机械与施工机械化(2014年4期)2014-03-01