
PVDF压电纤维仿生柔性传感器水下传感特性研究
2023-01-30 07:01郭成东陈宇航曹鑫林吴志学边义祥
压电与声光 2022年6期
郭成东,陈宇航,曹鑫林,吴志学,边义祥
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
自然界中,许多动物拥有感知周边环境并做出反应的能力,这对动物的生存起着至关重要的作用。昆虫通过周围气流的变化感知天敌的位置[1]。老鼠通过触须感知气流的变化判断危险[2]。猫利用猫须感知周围环境,寻找猎物[3]。鱼类需要感知系统(侧线系统)躲避天敌和捕食一些水中的小虫子,通过侧线系统感知水下物体的运动,从而达到追踪和躲避的效果[4-5]。两栖动物海豹利用胡须对水下情况进行感知,以便锁定鱼群的位置,以及躲避鲨鱼和虎鲸的追捕[6]。其感知系统的原理类似。受上述动物的启发,2002年制备了第一个硅基悬臂梁的流速传感器后[7],各种传感机制被应用到研究中,包括压阻式、电容式及压电式等[8-9]。随着水下航行器、水下机器人的微型化和柔性化,水下传感器也逐渐向柔性、高灵敏性发展。文献[10]开始用聚偏二氟乙烯(PVDF)压电纤维开发了压电式柔性流速传感器,但灵敏度不高,且无方向性。2019年,蒋永刚等[11]仿鱼类侧线开发了基于压电薄膜的水动力仿生柔性侧线传感器。与其他材料相比,PVDF更具有优良的压电性和柔性[12-14],是一种优良的传感器材料。因此,本文仿造海豹触须的结构设计制备了以PVDF为材料的表面四电极PVDF压电纤维柔性传感器,以PVDF压电纤维表面的压电效应产生电荷为基础[15]。实验分析了此传感器对水下激励的响应,通过激振源产生不同激励的信号和此传感器输出的信号进行对比,可得此传感器的性能。
1 表面四电极PVDF压电纤维仿生柔性传感器的制备
将PVDF颗粒在200 ℃条件下加热至熔融状态,让其覆盖在金属纤维表面,形成一层PVDF包覆层,在空气中完全冷却后可得到一段含金属芯的PVDF压电纤维,其中金属丝刚好处在压制好的纤维中心[16],在受到外力作用下,PVDF纤维表面电荷密度产生变化,所以需在表面涂上导电银漆收集电荷,并以电信号的方式输出。
经过上述制备过程后,需对压电纤维进行极化使其具备压电性,在PVDF压电纤维表面均匀涂上4片电极,如图1所示。极化时金属芯作为负极,4片电极作为正极,把压电纤维放入150 ℃、外加电压0.5 kV、装有硅油的油温箱中极化45 min,待冷却至室温时取出。经极化处理后,压电纤维的电极覆盖区域具有压电性,而未被4片电极覆盖的区域不具有压电性,即制备出表面涂导电银漆部分带电、未涂导电银漆部分不带电的四电极PVDF压电纤维。
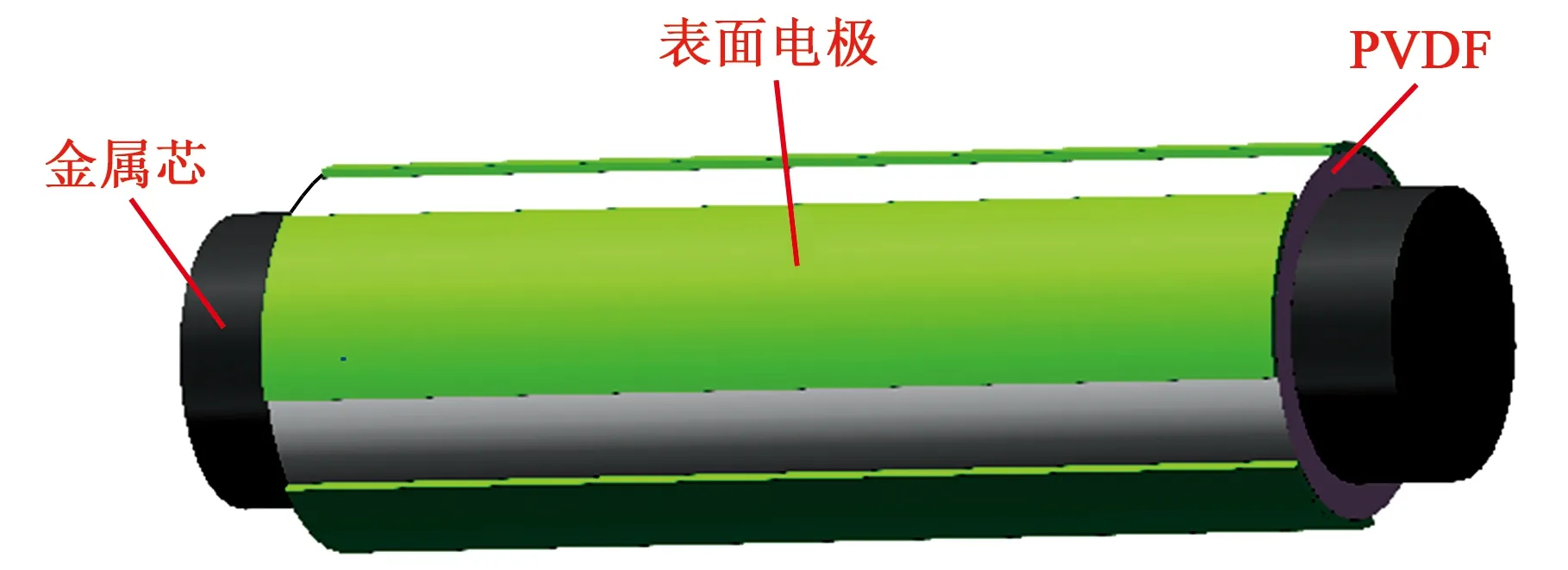
图1 四电极PVDF压电纤维
图2为海豹触须的剖面图结构[17]。纤毛发生变形后刺激底部的神经细胞产生神经冲动,然后传递给大脑,海豹由此判断水中物体的运动和方向。本文仿造海豹触须结构,设计制备了一个基于PVDF压电纤维仿生柔性传感器。将上述处理好的PVDF压电纤维抽去金属芯,裁剪至合适大小,抽去金属芯部分用类似动物触须的光纤代替(见图3),经测试,光纤与动物的触须相似度较高,这使传感器具备更好的柔性。本文对传感器在水下的感知性能进行测试,考虑到压电纤维表面的导电漆,所以需要在纤维表面覆盖一层软胶防水,为避免导线与水接触,导线引出部分需用软管粘连。传感器下方的可调角度旋转基座可调整传感器的角度,用于方向性实验,从而制备出可在水下进行实验测试的四电极PVDF压电纤维柔性传感器(见图4)。

图2 海豹触须的剖面图结构
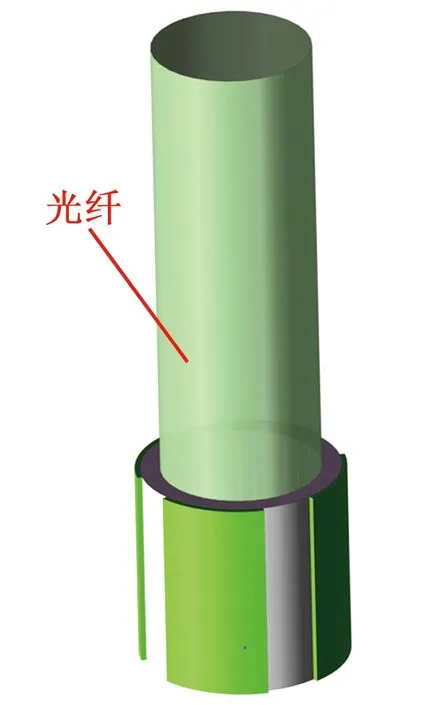
图3 抽去金属芯的PVDF压电纤维
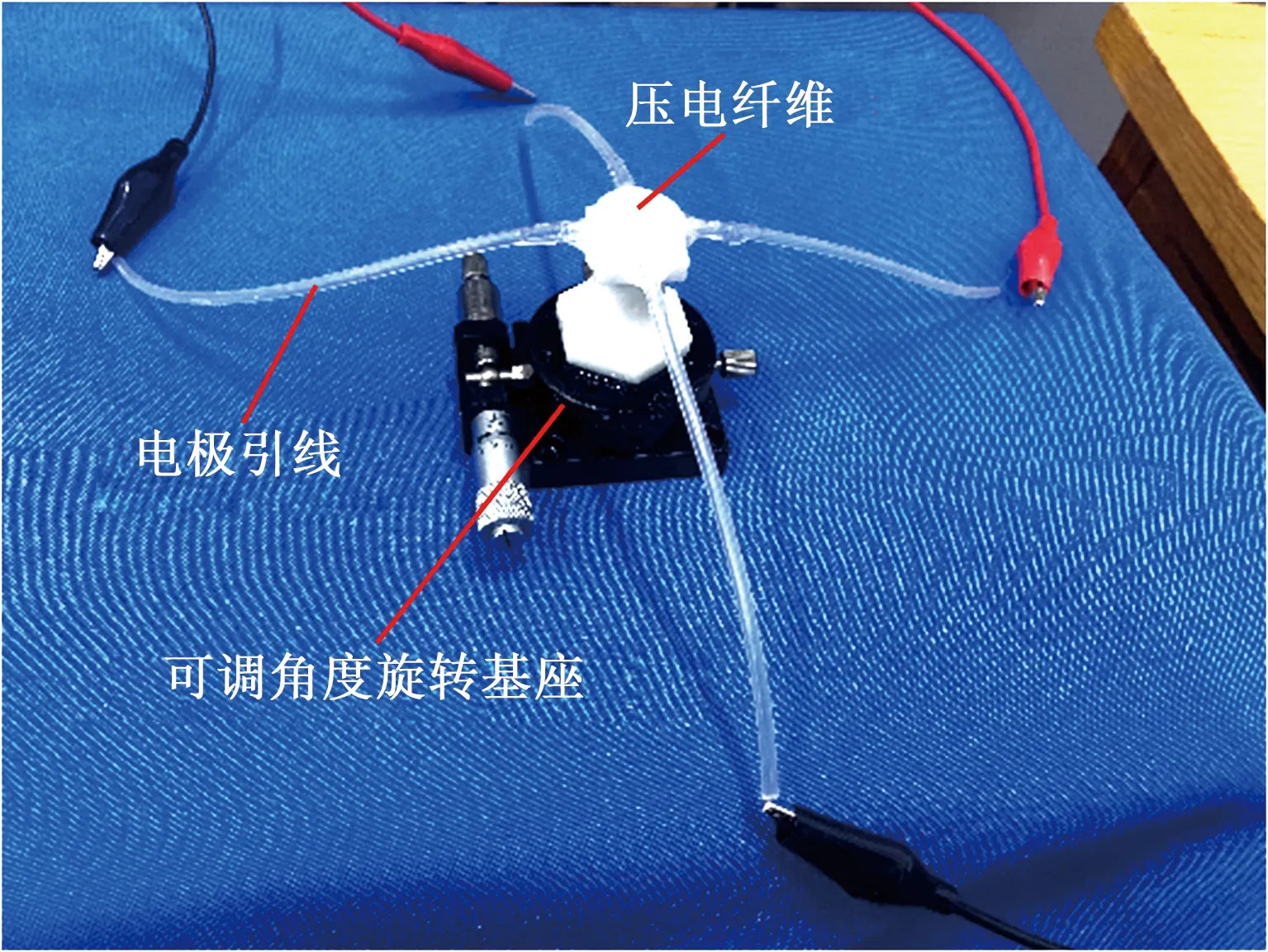
图4 四电极PVDF压电纤维柔性传感器
2 表面四电极PVDF压电纤维仿生柔性传感器传感原理
水生动物胡须由柔软的毛组织构成,当受到刺激时毛组织会发生变形。仿照海豹胡须的结构,一段固定在基体上,一端自由,当受到激励时,传感器中的光纤部分发生变形,带动压电纤维部分发生变形,传感器受到激励时的截面图如图5所示。激励信号不同,产生的电信号不同,根据电信号可测试该传感器的性能。

图5 传感器截面图
当传感器压电纤维部分发生变形时,计算电极上产生的电荷使用第一类压电方程[18],将边界条件代入方程后,PVDF层中电位移Dr可表示为
(1)

(2)
(3)
式中:l为PVDF压电纤维的长度;α为表面电极的包角;M(x) 为沿长度方向的弯矩;E为弹性模量;I为惯性矩;RC为表面电极的半径;x为长度方向;θ为中心角。
作为传感器使用时共有4片电极,电极1、3和电极2、4各为一组输出电路,因其是对称的,所以产生的电荷相等且相反。为了方便表述,设电极1、3间的电荷差为Qa,设电极2、4间的电荷差为Qb,则:
Qa=Q1-Q3=2Q1
(4)
Qb=Q2-Q4=2Q2
(5)
3 表面四电极PVDF压电纤维仿生柔性传感器水下传感性能实验
3.1 对不同激励信号的感知
在充满了水的水池(1.2 m×1 m×0.4 m)中进行不同激励信号下的感知实验,激振器和激光位移传感器通过钢架固定在水池上方,激振器的激振头部分和制备完成的传感器完全浸在水中,实验装置图如图6所示。在激振器的正下方安装10 mm的振动圆球,产生流体动力刺激,激振器施加正弦、三角、冲击和方波振动位移,激振器的频率为1 Hz,振幅为2 mm,将产生的电荷信号经过电荷放大器放大后与激光位移器测得自由端位移信号一起由数据采集卡实时采集到电脑上,通过Labview和Origin对数据进行处理。两组电极受到正弦、三角、冲击和方波激励后,输出的电荷信号和激光位移测得自由端位移信号如图7所示。
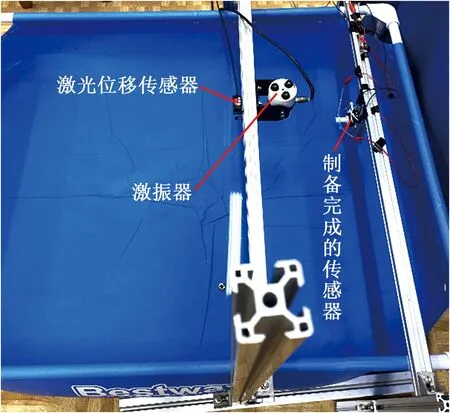
图6 实验系统的照片

图7 输出电荷信号和激光位移测得自由端位移信号
由图7可知,用不同波形进行激励时,因为激振源的运动方向和1、3组电极垂直,故在一次激励作用下,1、3组电极比2、4组电极输出电荷大。用正弦、三角、冲击和方波激励呈现出相同的规律,在不改变频率和幅值的情况下,不同波形输出的电荷信号基本相同,两组电极输出的电荷信号和激振器输出波形形状一致,由此可知,此传感器可实现对水下不同激励信号的感知。
3.2 对不同速度的响应
图8为实验装置示意图。图中,激振源的频率和幅值都可调节。本实验中,激振源的频率为2 Hz,振幅为1 mm。实验开始时,传感器的输出信号由电荷放大器放大,信号可由滤波器进行过滤,之后通过数据采集卡进行收集,最后由origin处理得到传感器的输出电荷,利用处理后的输出电荷峰值进行统计计算,传感器位于激振源的正下方,激振源的振动方向与传感器的立柱垂直,通过改变激振源中心与传感器柱体之间的距离来调整流速,传感器检测流速为
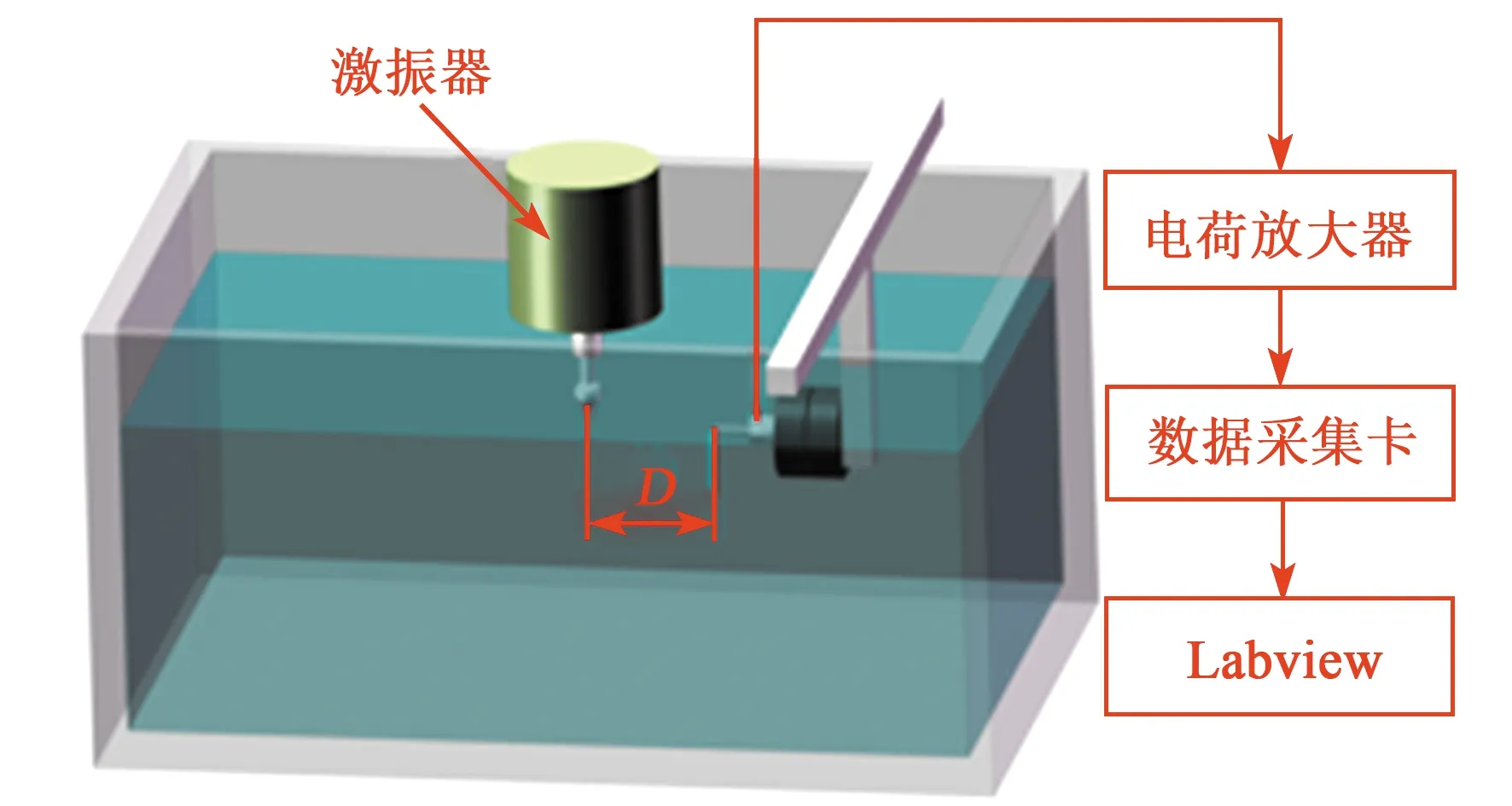
图8 实验装置示意图
(6)
式中:f为激振源的振动频率;a为激振源圆球的直径;s为振幅;D为激振源中心圆球距离传感器支柱的距离。
如图9所示,当D发生变化,相应的速度分别为94.2 mm/s、56.5 mm/s、6.4 mm/s时,传感器的两组电极输出信号发生变化,1、3组电极因为与激振源振动方向垂直,所以比2、4组电极输出的电荷信号大。图10为电荷输出和速度的关系。图中,电荷输出幅值是一组电极输出最大和最小电荷的差值,且随着流速的增加而增加,此传感器的灵敏度为0.06 pC/(mm·s-1),量程为0.15~98.7 mm/s,速度检测极限可达0.15 mm/s,与其他此类传感器相比,速度检测极限提升较多。
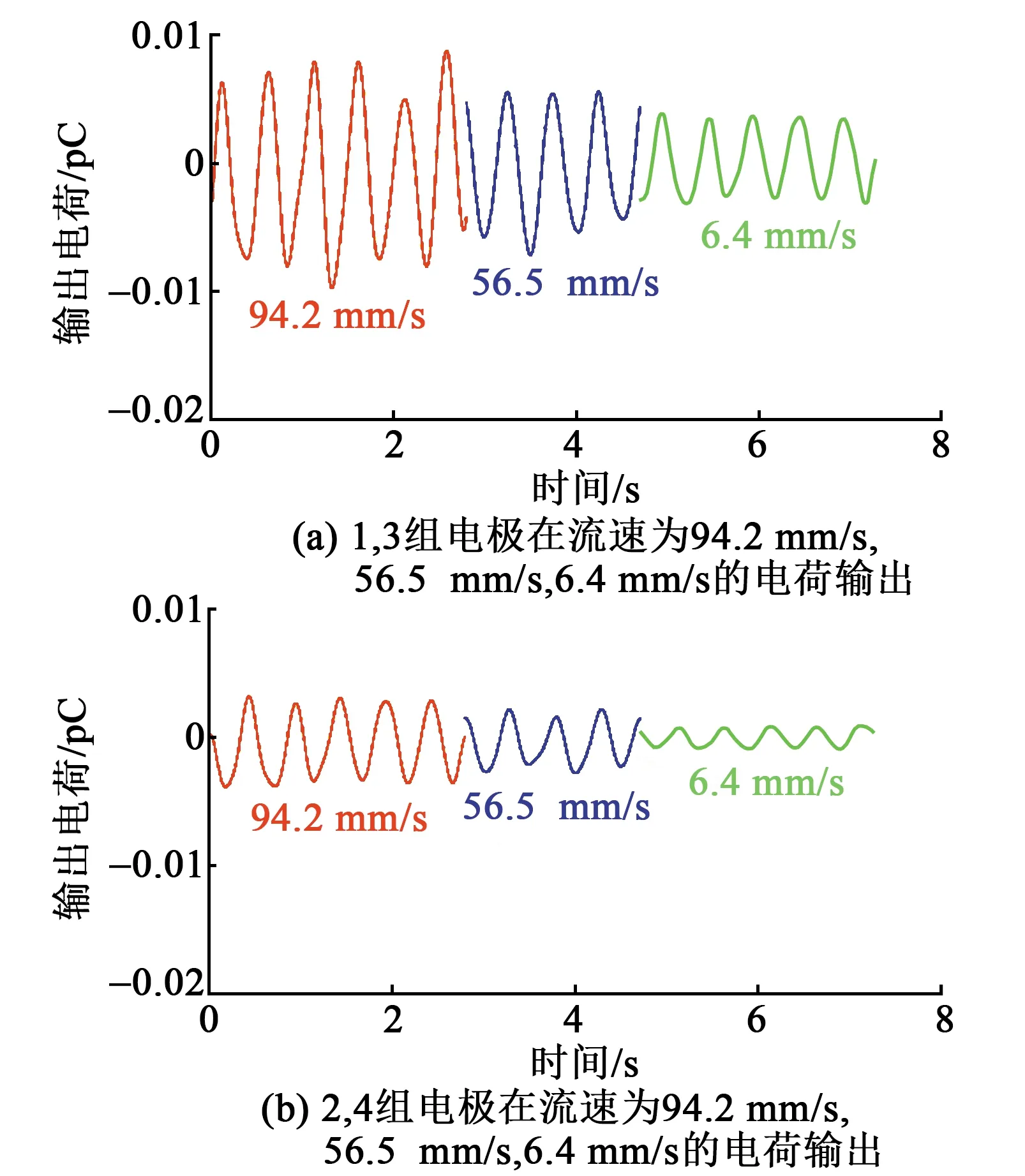
图9 两组电极在不同流速时的电荷输出

图10 两组电极电荷输出与流速的关系
3.3 对水下运动物体方向的感知
在水下对此传感器的方向性进行测试,传感器的底部安装了一个可变角度的圆盘,实验时,激振源的位置不发生变化,从0°开始转动圆盘,每次变化10°,递增到360°,输出信号显示为“8”字形,如图11所示。由图可看出,改变角度γ时,两组电极的输出电荷幅值都发生变化,其中0°和180°是传感器1、3组电极与激振器振动的方向。由图11(a)可看出, 0°和180°输出电荷幅值最大。由图11(b)可看出,2、4组电极在0°和180°处输出电荷幅值最小。相反,在90°和270°时,1、3组电极输出电荷最小,而2、4组电极输出电荷幅值最大。因为1、3组电极与激振器振动的方向平行,而2、4组电极与激振器振动的方向垂直。由图11还可看出,一组电极中对称的角度受到激励后输出电荷幅值是不同的,其原因可能是在划分4片电极时,对称的两片电极的角度不能达到完全一致;另外装置结构可能导致输出电荷有差异。该传感器为方向检测提供了可能性。

图11 两组电极方向性检测结果
4 结束语
本文以水生动物的触须为灵感,设计和制备了表面四电极PVDF压电纤维柔性传感器,主要介绍了表面四电极PVDF压电纤维柔性的制备过程,以及基于压电方程建立了表面四电极PVDF压电纤维柔性传感器传感理论模型,压电纤维变形引起了输出电荷的变化。主要研究了传感器对水下情况的感知性能(包括对不同激励信号感知、水动力感知及方向性感知)。用激振器输出正弦、三角、冲击和方波信号在水下固定位置进行激励,测试制备的传感器对水下不同信号的感知性能,经测试此传感器具备对水下不同激励的准确感知。在对水动力感知性能中,改变激振源到传感器的距离调整流速,计算出传感器检测到的流速大小,此传感器的灵敏度为0.06 pC/(mm·s-1),量程为0.15~98.7 mm/s,可检测的速度检测极限是0.15 mm/s,与其他检测流速的传感器相比,灵敏度较高,检测极限较小。在一固定点处激励,改变传感器角度后,传感器的两组电极输出的电荷和角度呈现“8”字型,说明制备的传感器具有良好的方向感知能力。
猜你喜欢
机械制造与自动化(2022年2期)2022-04-19
陶瓷学报(2021年3期)2021-07-22
时代农机(2019年8期)2019-12-27
中国机械工程(2019年22期)2019-12-02
船海工程(2019年1期)2019-03-04
铜仁学院学报(2018年6期)2018-07-05
科技创新与应用(2018年2期)2018-01-19
电子制作(2017年9期)2017-04-17
中外管理(2015年3期)2015-03-18
振动、测试与诊断(2014年6期)2014-03-01
