主被动一体化多波束激光雷达设计与实现
2023-01-30 05:57孙立杨居奎王玉诏彭欢张晨阳杨超汤天瑾宋志清穆生博倪建军孟俊清张传强
航天返回与遥感 2022年6期
孙立 杨居奎 王玉诏 彭欢 张晨阳 杨超 汤天瑾 宋志清 穆生博 倪建军 孟俊清 张传强
主被动一体化多波束激光雷达设计与实现
孙立1杨居奎1王玉诏1彭欢1张晨阳1杨超1汤天瑾1宋志清1穆生博1倪建军1孟俊清2张传强3
(1 北京空间机电研究所,北京 100094)(2 中国科学院上海光学精密机械研究所,上海 201800)(3 中国空间技术研究院总体部,北京 100094)
“句芒号”陆地生态系统碳监测卫星是中国首颗以主动激光雷达作为主载荷的林业遥感卫星。星上装载的多波束激光雷达是国际首台主被动一体化遥感载荷,采用激光与相机相结合的工作模式,利用激光雷达获取地面植被高度信息的同时,还可以获得高分辨率地面多光谱正射影像。文章回顾和介绍了该载荷系统的设计思路、工作原理、关键技术及实现情况,给出了测试与试验结果,可为同类载荷研制提供参考。
多波束 激光雷达 生物量 植被探测 陆地生态系统碳监测卫星 航天遥感
0 引言
星载激光雷达作为主动探测设备,具备获取全球地表三维信息的能力[1-2],能够获取植被高度等森林碳汇信息[3-4],同时在大气环境监测[5-6]、极地冰盖测量[7]、海平面高度测量[8]、测绘高程控制点[9]等方面都可以发挥重要作用。激光雷达是用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。工作原理为激光器产生并向地面发射激光脉冲,打在地面物体上反射回来,被接收器接收。接收器准确地测量光脉冲从发射到被反射回的传播时间,根据激光测距原理计算,就得到从激光雷达到目标点的距离。根据对回波信号的处理方式不同,激光雷达可分为阈值探测、全波形和光子计数三种技术体制。全波形激光雷达由于其能够通过回波波形信号提取地面植被高度、郁闭度等信息,因此在森林生物量探测领域具有较大优势,是目前研究的热点。作为地球观测系统计划的一部分,美国于2003年发射了ICESat-1卫星,其搭载了全球首个对地观测激光测距系统(Geoscience Laser Altimeter System,GLAS),可进行极地冰盖测量、云和气溶胶垂直结构探测、陆地地形、植被高度测量等任务。ICESat卫星在轨工作7年,获取了大量观测数据,展现出在全球尺度下冰盖高程测量、植被及生物量测量的突出作用和优势[10-11]。2018年9月,美国发射了ICESat-2卫星,搭载全球首台光子计数激光雷达(Advanced Topographic Laser Altimeter System,ATLAS)。2018年12月,美国发射了全球生态系统动力学调查雷达(Global Ecosystem Dynamics Investigation,GEDI),部署在国际空间站上,其搭载了全球首台用于高分辨率森林垂直结构测量的多波束线性体制的激光测高仪,主要用于热带和温带地区的森林冠层高度、垂直结构、地面高程等的精准测量[12-13]。我国于2016年5月发射的“资源三号”卫星02星[14-15],搭载了首台对地激光雷达试验载荷,用于测试激光测高仪的硬件性能,探索高精度高程控制点数据获取的可行性,以及采用该数据辅助提高光学卫星影像无控立体测图精度的可能性。后续在2019年发射的“资源三号”卫星03星上,搭载了一台单波束激光测距仪,采用阈值探测模式,实现了我国激光测距仪的在轨运行。2019年11月发射的“高分七号”卫星搭载了中国首台全波形体制激光测距仪,提高了测距精度,同时能够获取地面光斑垂直高度分布信息,与双线阵相机配合完成1:10 000比例尺地形复合测绘[16-17]。由于星载激光雷达工作模式为点探测,只能获取激光足印位置的离散信息,要获取大面积地面数据,必须与遥感图像相结合。而目前在轨尚无激光与相机一体化的载荷,图像信息和激光信息来源于不同卫星,可能由于数据覆盖范围不匹配或时效性差等原因导致应用效率降低。
2022年8月4日,“句芒号”陆地生态系统碳监测卫星在太原卫星发射中心成功发射。它是我国首颗以陆地生态系统碳监测、森林资源监测和森林生产力评估为主要功能的林业遥感卫星,主要用于获取全球森林三维数据,进而反演出生物量和森林碳汇数据,并兼顾碳源测量和大气气溶胶探测任务。卫星上搭载的多波束激光雷达是国际首台激光与相机相结合,主被动一体化的遥感载荷,同时具备5波束激光全波形测距和高分辨率多光谱成像功能。本文介绍了该主被动一体化多波束激光雷达的设计思路、工作原理、关键技术及实现情况,给出了测试与试验结果。
1 系统总体方案设计
多波束激光雷达采用主被动相结合、点面相结合的工作模式。其探测任务包括:地面高程和树高测量,以及高分辨率多光谱对地成像。为实现森林树高测量任务,应用了全波形测距体制,相对于传统阈值检测体制,全波形能够反映植被冠层高度、森林垂直结构、郁闭度等信息。
高分辨率对地多光谱成像通道共4谱段,称为0°相机,与卫星的多角度多光谱相机分系统另外4台相机配合,分别从0.5°、±19°和±41°,共5个角度对地面进行观测,以精确获取地面植被二向反射分布函数信息(BRDF),进行生物量反演。
多波束激光测距通道用于植被高度测量和星地距离测量,激光波长1 064nm,共5波束,重复频率40Hz。波束数量和重复频率均是目前中国在轨的卫星中最高的。激光总功率与单脉冲能量、重复频率、波束数量成正比,因此,综合考虑整星能源限制和工程实现难度的情况下,必须降低单脉冲能量。经论证,能量降至73mJ可以满足植被探测需要。但能量降低势必需要增大接收口径至1m以保证回波信噪比。接收镜头口径增大后,可使得0°相机数更小,MTF和信噪比更高,有利于成像品质。另外还利用该镜头实现了星上大气气溶胶探测子系统的回波信号接收功能。综上所述,项目组创新的采用了多通道一体化光学系统,将高分辨率对地成像、植被激光回波接收、大气激光回波接收3个通道采用分视场的方式集成到1个1m口径光学系统中,提高了系统集成度,增强了相机和激光的相对稳定性,有利于提高激光定位精度,同时大幅降低系统体积和质量。
多波束激光雷达地面视场分布如图1所示。0°相机布置在–0.6°~–0.4°视场范围内,焦面探测器采用4片TDICCD器件拼接,植被激光测距通道布置在–1.05°视场位置,5波束之间间隔0.425°。在卫星轨道高度506km情况下,激光地面光斑间距沿轨道方向180m、垂直轨道方向3.75km。利用一台光轴监视相机覆盖植被激光接收视场,光轴监视相机同时对激光和地面景物成像,实现激光光轴监视和地物匹配。气溶胶激光接收通道为1波束,为避免与植被激光通道相互干扰,布置在–1.15°视场位置。

图1 多波束激光雷达地面视场分布图
多波束激光雷达原理框图如图2所示。激光雷达主体集成安装5套各自独立的植被激光发射及光路调整单元和激光探测接收单元,0°相机视频电路单元,光轴监视相机单元,接收望远镜及主支撑单元等。植被激光器主体出射激光,经扩束镜头压缩发散角后射向地面,并通过导光组件导入部分光源到光轴监视相机实现发射光轴的指向记录。0°相机通过接收镜头将地物可见光谱段光信号汇聚到4色TDICCD上,输出0°相机图像数据。激光探测接收单元通过主波光纤引入部分出射激光信号作为主波信号,通过接收镜头收集地物反射激光回波汇聚到APD探测器上,经处理输出激光回波波形信号。激光雷达主体还设计了调焦机构和双光楔机构,用于完成0°相机焦面位置调整和激光收发平行性调整。
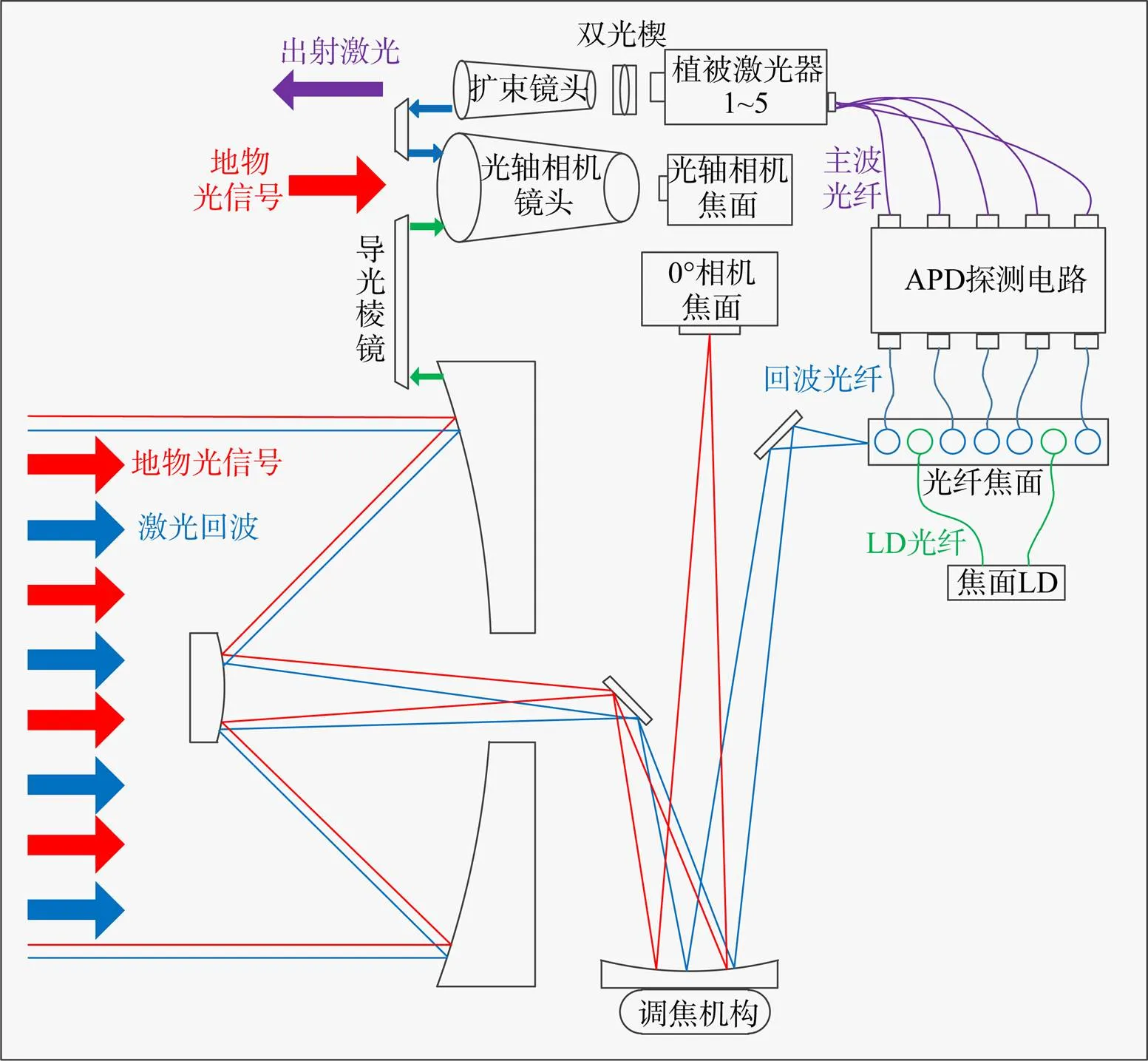
图2 多波束激光雷达原理框图
考虑到各部组件的安装方式、结构布局及光轴稳定性要求,结合光学系统方案,激光雷达主体整体构型如图3所示。整体设计思路以大口径接收镜头为中心,激光发射组件、接收组件、0°相机焦面、电子学设备、星敏感器等围绕镜头布置。5波束激光发射、光轴监视相机等先集成在植被激光发射组件上,然后整体与接收镜头装配。星敏直接安装在接收镜头顶部,以提高载荷光轴指向与星敏之间的稳定性,有利于提高地面定位精度。雷达主体底部与卫星之间通过一组隔振组件连接,一方面降低发射段的力学响应,另一方面也对在轨的卫星微振动传递起到抑制作用。多波束激光雷达主要技术指标如表1所示。
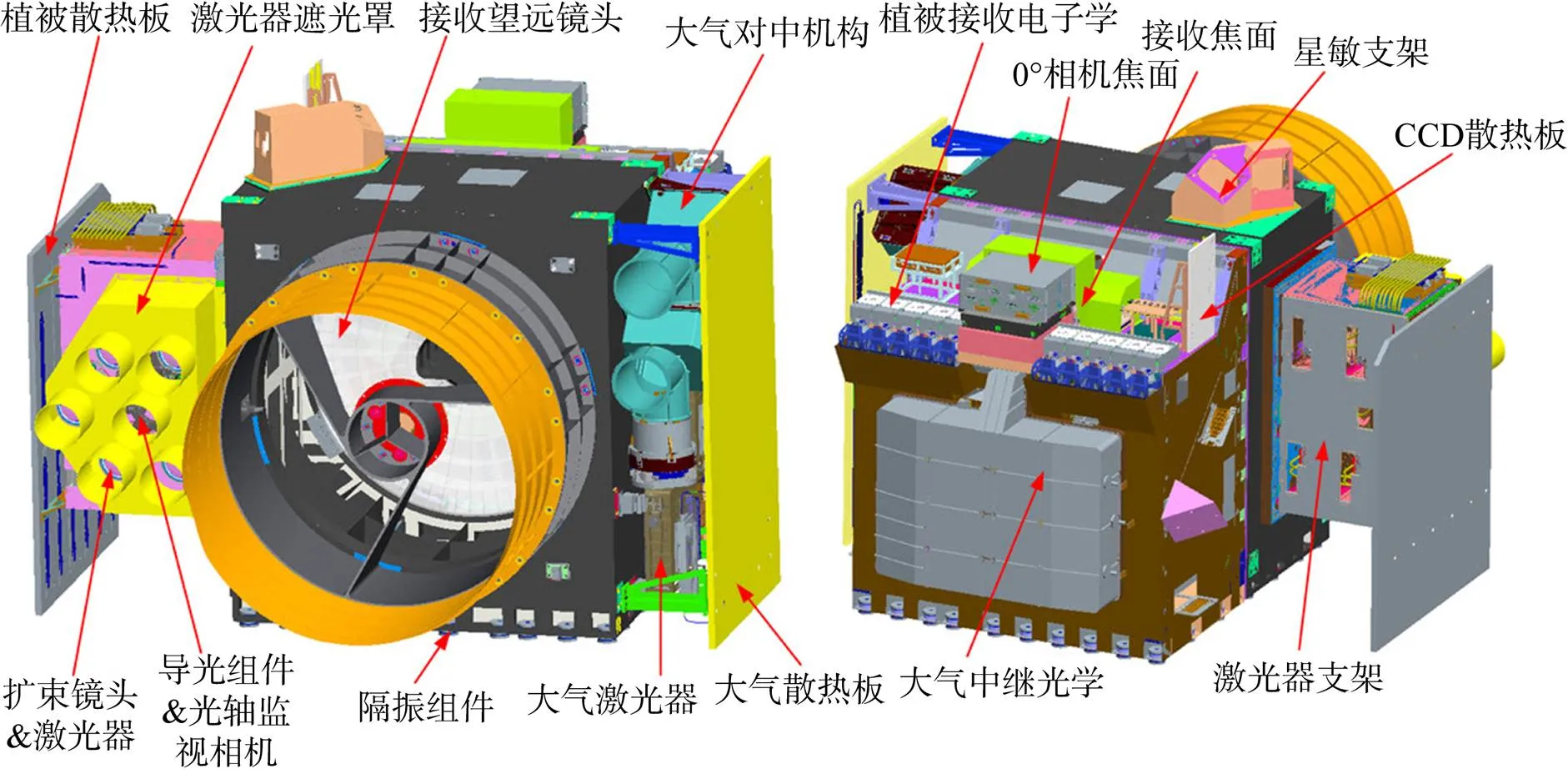
图3 多波束激光雷达模装图
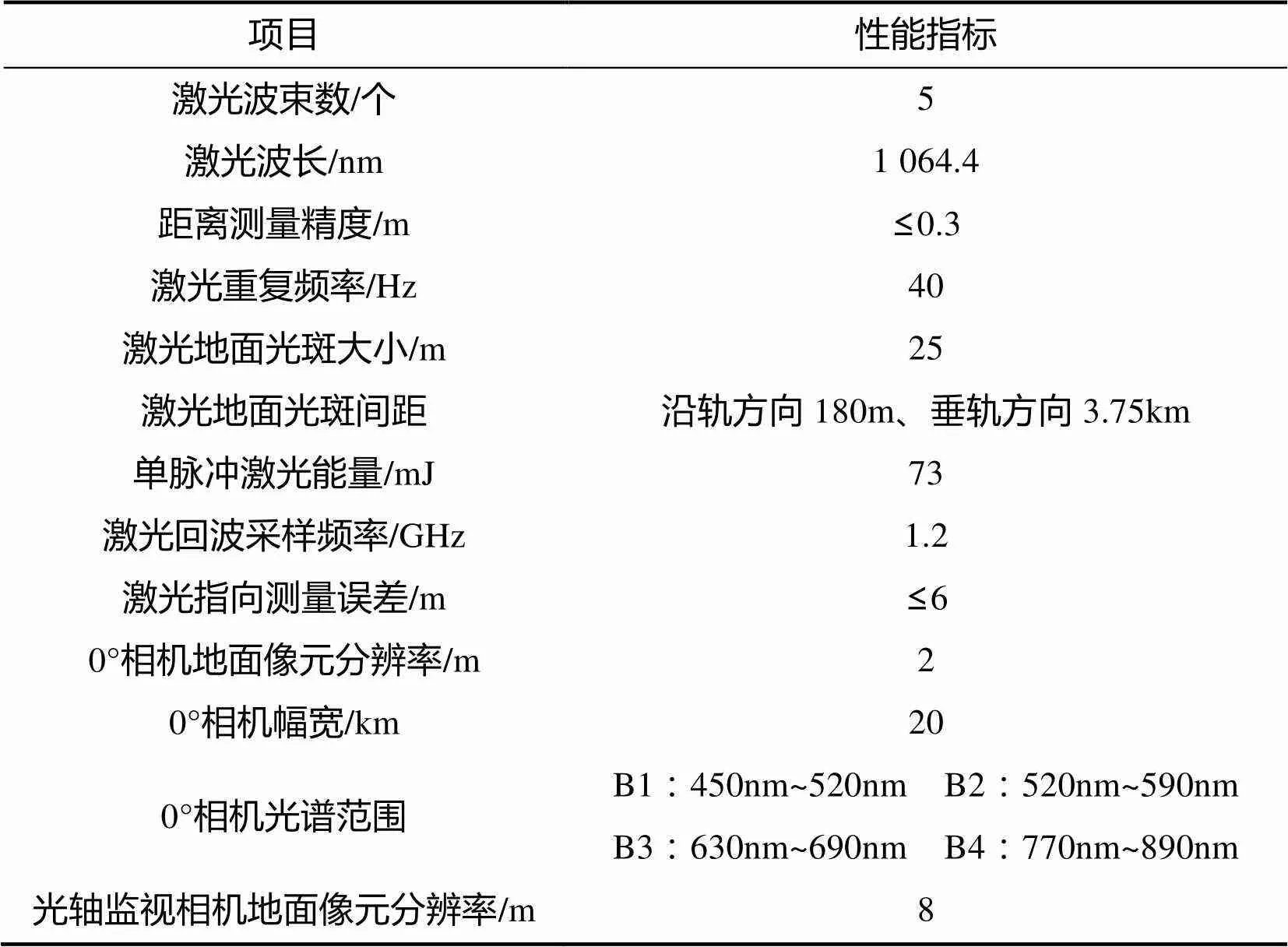
表1 多波束激光雷达指标
2 关键技术及实现
2.1 大口径多通道光学系统设计技术
接收望远镜头首次采用了激光和相机多通道一体化技术,实现了多光谱0°相机成像、5波束植被激光回波接收和1波束大气激光回波接收三种功能。三种功能中,0°相机成像通道幅宽最大、对像质的要求最高,根据光学设计原理,其偏视场角度也最小。5波束测距通道对像质要求较低,但其幅宽比大气单波束通道幅宽更大。基于以上要求,采用全反射式系统进行设计,0°相机可见光多光谱通道与植被激光、大气激光使用光轴同侧视场,此时激光测距与大气通道的偏场角进一步增大,但可以有效减小三镜尺寸,通过三镜调焦可使各通道同时处于最佳焦面位置。通过激光反射镜,将植被激光和大气激光接收位置偏转90°,便于0°相机CCD和激光探测器分别布置。光学系统构型和参数分别如图4和表2所示。
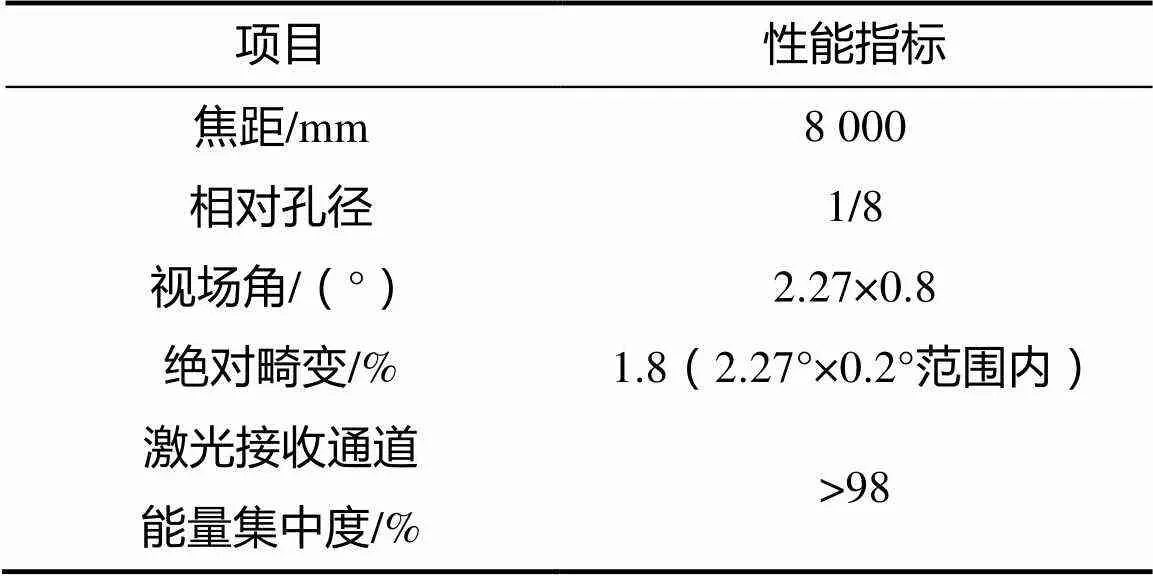
表2 多通道接收光学系统技术指标
光学系统主、次、三镜均为非球面镜,在光学系统靠近焦面位置利用激光反射镜将植被激光和大气激光通道偏转90°,以实现0°相机焦面、激光光纤焦面的空间布置。植被回波通道设计了汇聚透镜组,将系统焦距进一步压缩到2 667mm,聚焦至回波光纤端面。在回波光纤进入APD探测器之前,设置中继透镜组件,并将窄带滤光片插入中继透镜组,以抑制背景噪声,提高系统信噪比。
2.2 高光束品质高可靠激光发射技术
多波束激光雷达的激光器重复频率高,单脉冲能量大,相比于中国目前在轨的其他激光器,总平均功率提升约20倍,对激光器高稳定性和精密热控都是巨大挑战,同时也受到卫星能源供给限制。为减低总功率,激光器单脉冲能量从“高分七号”卫星激光器的180mJ降低到73mJ。激光器技术路线与“高分七号”卫星一致[18],采用“振荡级+一级放大级”的方案,这样两级的结构效率更高、体积更小。振荡级采用被动调Q的板条激光器,板条材料为掺钕钇铝石榴石(Nd:YAG)。振荡级晶体采用板条形状,削弱了热致双折射效应的影响,且由于光线在板条内走“之”字形,可以部分消除热透镜效应,以确保振荡级光束品质。振荡腔采用双Porro直线腔,使激光器在2个正交方向上都具有非常低的失调灵敏度[19]。振荡级选用波长稳定的LD阵列,在工作温度范围内的波长漂移量低于1nm。为保持5台激光器的一致性,对LD根据中心波长进行了筛选。振荡级采用被动调Q晶体Cr4+:YAG,一方面,可以省略电光调Q所需的高压驱动电源,降低激光器的复杂度;另一方面,被动调Q具有纵模的自然选择性[20],这样可以使激光器在多数情况下单纵模运转[21]。在泵浦峰值功率200W,泵浦脉宽200μs时,振荡级输出能量为2.6mJ,脉冲宽度3.7ns。
振荡级光斑扩束后进入功率放大级。功率放大级使用分光镜方形截面的Nd:YAG板条晶体,采用上下面泵浦侧面冷却的散热结构。振荡级信号光经过偏振分光镜(PBS)转折后进入板条晶体,一次通过晶体后能量放大到约25~30mJ。然后经过一个波片和反射镜返回,再次经过波片,激光偏振态旋转90°并第二次进入晶体,放大到73mJ以上的能量。由于此时激光偏振态已经旋转了90°,因此穿过PBS,完成放大输出。激光器的实物图如图5所示,装调完成后的激光远场光斑如图6所示。

图5 激光器实物图
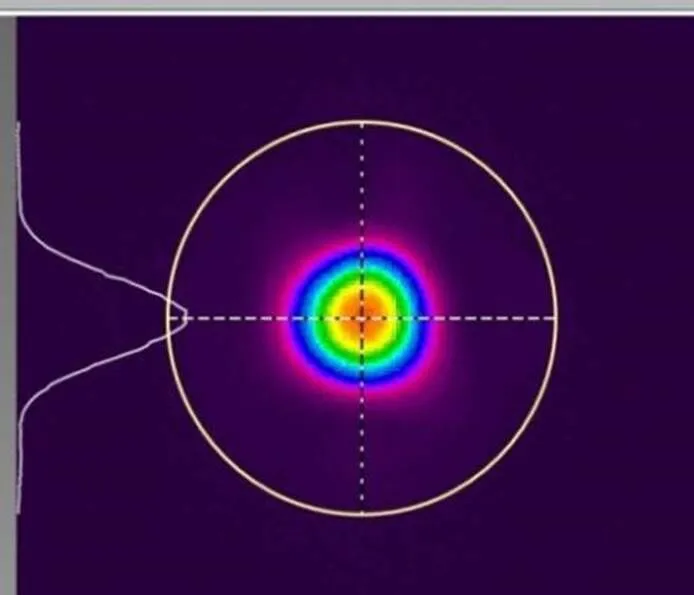
图6 激光远场光斑
为解决5台大功率激光器的高精度温控,采用了槽道热管与环路热管相结合的热控方案。5台激光器头部工作产生的热量先通过槽道热管传递到集热板上,然后通过1套大功率环路热管和散热板进行排散。集中散热方式可以在保证激光器控温精度的前提下,降低热控系统规模。经地面真空试验验证,5台激光器工作过程中温度满足(20±1.5)℃的要求,5台激光器温度不一致性优于1℃。
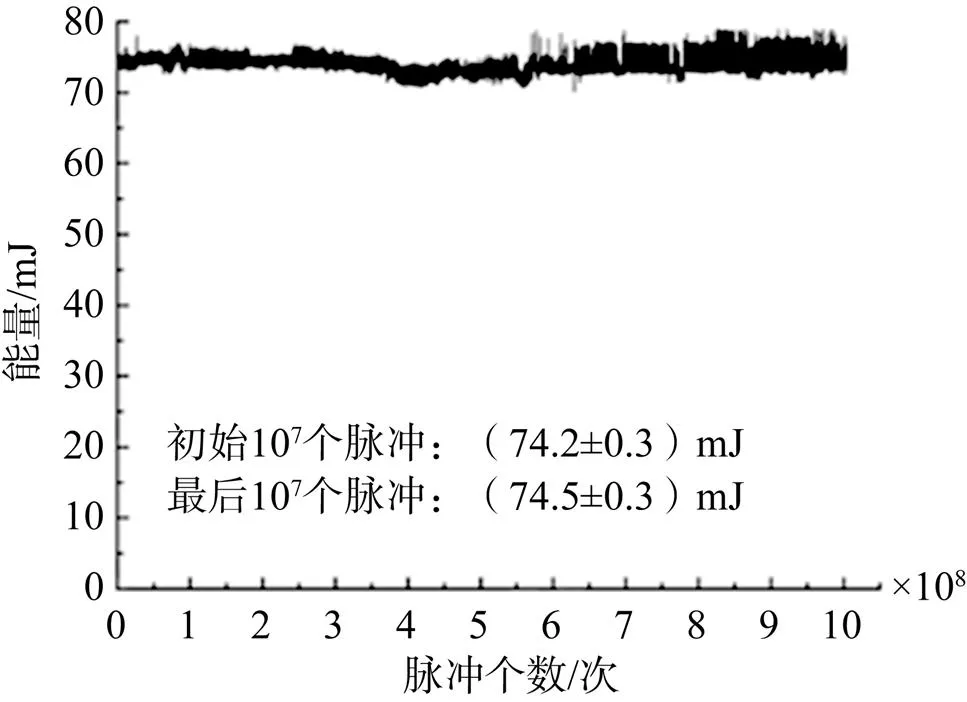
图7 激光器寿命试验
由于重复频率提高,单台激光器8年总工作脉冲发射次数达到1×109次。为验证激光器寿命和可靠性,采用相同元器件及工艺,研制了一台寿命件进行寿命考核,如图7所示,寿命件累积发射1.03×109个脉冲,能量抖动为1.2%,寿命末期与初期相比,能量无明显下降。
2.3 高精度激光指向监视和调整技术
星载激光雷达为提高地面激光点定位精度,通常设计激光指向监视系统,通过足印相机将激光光斑和地物镜像相匹配[22]。为满足树高测量和地面高程测量精度要求,要求激光指向监视误差≤6m。为此设计了一套高精度指向监视和调整系统,该系统由光轴监视相机、导光棱镜、双光楔机构、焦面LD等组成,系统集成后激光扩束镜头、光轴监视相机与导光组件装配图如图8所示。激光从激光器输出窗口出射后,通过扩束镜头射向地面。导光棱镜在扩束镜头边缘处取部分激光,导入光轴监视相机,得到激光光斑。光轴监视相机工作频率与激光出光对应,每次激光出光,首先采用短曝光时间对激光成像,得到激光光斑图,如图9所示。之后紧接着用长曝光时间对地物成像,由于采用同一台相机成像,激光图像与地物图像严格匹配,再经过地面测试标定,即可获得激光的精确指向信息。此外,光轴监视相机图像还可与0°相机图像进行再次匹配,将激光光斑位置信息匹配到0°相机的高分辨率图像上,更有利于后期地面数据应用。在接收镜头光纤焦面处设置2个焦面LD,出射焦面位置指示光,经接收镜头、导光棱镜导入光轴监视相机,得到焦面LD光斑图像,地面测试时标定出LD光斑位置与接收光轴的对应关系,即可计算出接收光轴位置。通过旋转双光楔镜,改变激光发射光轴指向,结合光轴监视相机得到的激光收发光轴,可以实现在轨激光收发平行性精确调整。
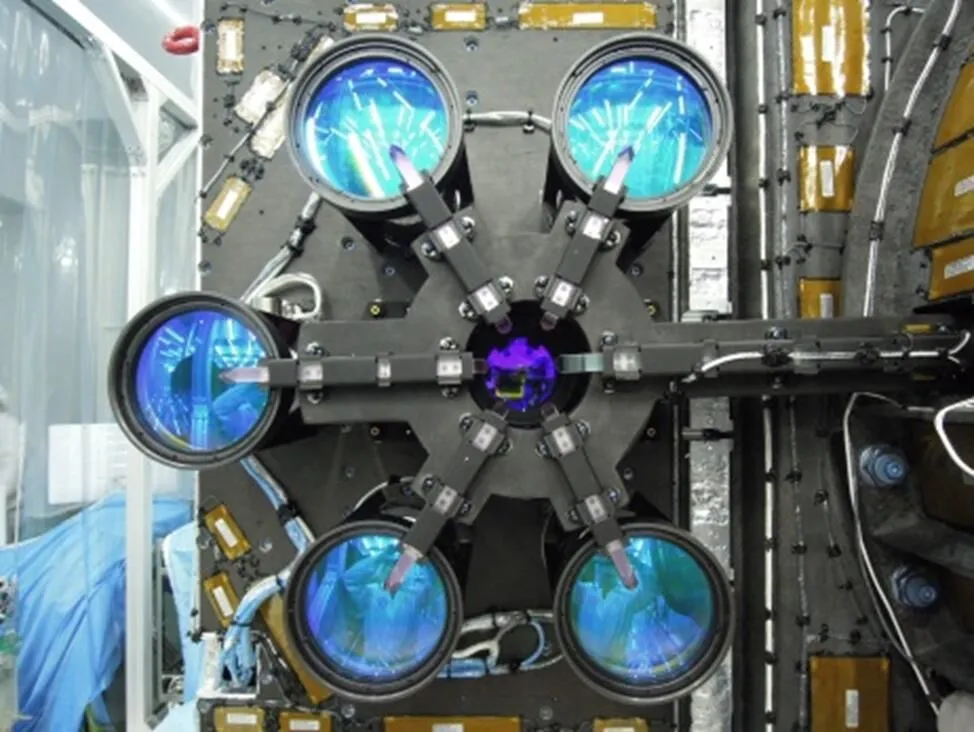
图8 激光扩束镜头、光轴监视相机与导光组件

图9 光轴监视相机拍摄的激光和LD光斑
3 系统测试与试验验证
多波束激光雷达在研制过程中,进行了激光收发、0°相机、光轴指向监视等多项性能测试和地面标定,以满足在轨使用要求。激光雷达真空热试验是地面测试过程中最接近在轨状态的试验,因此这些标定和测试工作主要在真空热试验时完成。
多波束激光雷达真空热试验状态如图10所示,多波束激光雷达放置在高精度二维转台上,激光发射单元输出激光通过激光衰减组件后,经平行光管汇聚至平行光管焦面光束分析仪,完成激光发散角、激光指向、收发平行度等性能测试。激光雷达、二维转台和平行光管均放置在真空罐中,罐壁设置光学窗口,多光轴标校模块位于光学窗口外,便于测试时调整。
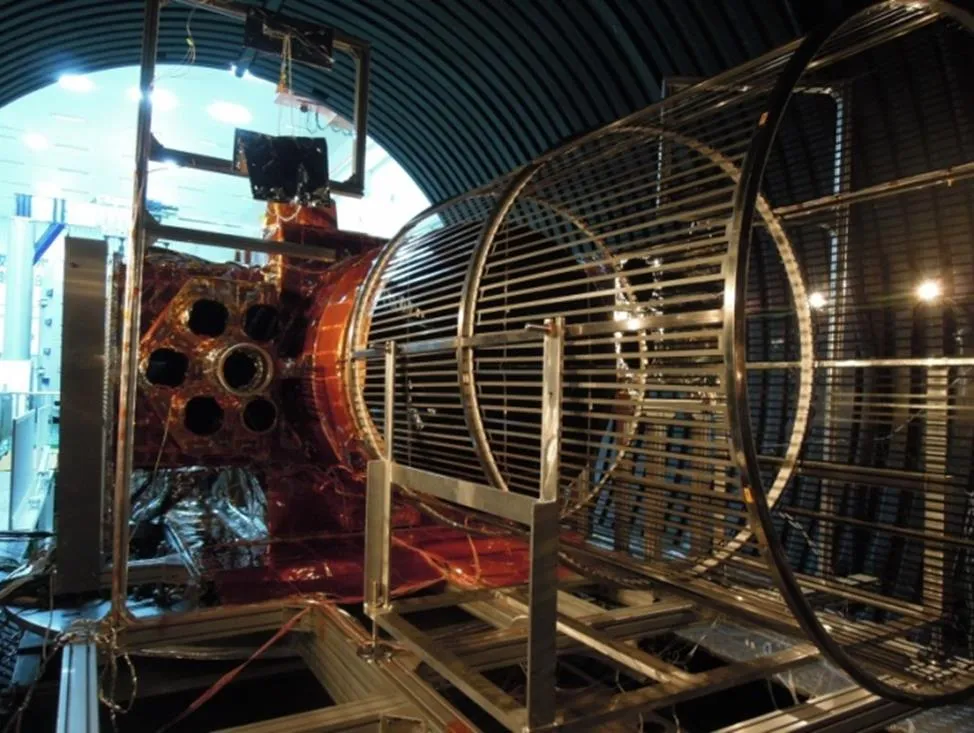
图10 多波束激光雷达真空热试验
3.1 激光指向偏差标定
由于导光棱镜采用扩束镜头边缘子口径取光,因此光轴监视相机图像上得到的激光点与实际激光出射方向存在系统偏差,该偏差在真空热试验过程中进行标定,标定利用多光轴标定系统完成。激光直接通过导光棱镜进入光轴监视相机,在光轴监视相机上得到激光光斑图像,其质心位置定义为(,)。测试平行光管接收全口径激光出射光,在焦面位置计算远场光斑质心,标出激光发射光轴位置。从激光发射光轴位置反打测试激光,进入光轴监视相机,得到光斑(,),即代表实际激光出射方向。由此,可以得到光轴监视相机上的激光点和实际激光指向之间的关系。同时,通过转动双光楔进行激光指向调整,使激光发射光轴在±1′范围内扫描,在不同位置测试激光点与实际指向的关系,如表3所示,测试表明±1′范围内该偏差为固定值。

表3 激光指向固定偏差标定结果
3.2 激光出光稳定性测试
利用光轴监视相机获取的激光光斑进行了激光出光稳定性测试,在开机工作时间内依次测量某个波束在光轴监视相机上的成像光点的质心坐标,采用一个工作周期内激光点的质心坐标抖动量来表征激光指向稳定性。测试结果见表4,其中、分别表示沿轨和垂轨方向,测试结果表明,在单次开机15min过程中激光指向稳定性优于0.6″。

表4 激光指向稳定性测试数据
4 结束语
陆地生态系统碳监测卫星已经在轨运行,目前卫星工作正常,正在进行在轨测试。多波束激光雷达作为我国首个林业主被动一体化遥感载荷,突破了大口径多通道光学系统、高能量高可靠激光器、高精度激光指向监测和调整等多项核心关键技术。
激光雷达可以直接提供森林垂直结构信息,获取森林生物量,捕捉全球森林的广泛趋势和动态变化情况,且费用低,可用于大区域林业资源调查研究,具有广阔的应用前景[23]。该卫星成功在轨应用将使我国具备快速监测本国及其他国家陆地生态系统碳收支的能力,增强我国承担国际责任的能力和话语权,响应“碳中和,碳达峰”的发展目标。
[1] 姬剑锋, 焦文海, 胡国军. 卫星测高原理及其测距精度估算[J]. 测绘技术装备, 2005, 7(2): 46-49.
JI Jianfeng, JIAO Wenhai, HU Guojun. Principle and Ranging Accuracy Evaluation of Spaceborne Laser Altimeter[J]. Geomatics Technology and Equipment, 2005, 7(2): 46-49. (in Chinese)
[2] 王建宇, 洪光烈. 激光主动遥感技术及其应用[J]. 激光与红外, 2006, 36(S1): 742-748.
WANG Jianyu, HONG Guanglie. Technologies and Applications of Laser Active Remote Sensing[J]. Laser & Infrared,2006, 36(S1): 742-748. (in Chinese)
[3] 庞勇, 李增元, 陈博伟, 等. 星载激光雷达森林探测进展及趋势[J]. 上海航天, 2019, 36(3): 20-27.
PANG Yong, LI Zengyuan, CHEN Bowei, et al. Status and Development of Spaceborne Lidar Applications in Forestry[J]. Aerospace Shanghai, 2019, 36(3): 20-27. (in Chinese)
[4] 郭庆华, 苏艳军, 胡天宇, 等. 激光雷达森林生态应用-理论、方法及实例[M]. 北京: 高等教育出版社, 2018.
GUO Qinghua, SU Yanjun, HU Tianyu, et a1. Lidar Principles, Processing and Applications in Forest Ecology[M]. Beijing: Higher Education Press, 2018. (in Chinese)
[5] WINKER D M, PELON J R, MCCORMICK M P. The CALIPSO Mission: Spaceborne Lidar for Observation of Aerosols and Clouds[C]//Lidar Remote Sensing for Industry and Environment Monitoring III, October 24-25, 2002, Hangzhou, China. SPIE, 2003.
[6] 卢乃锰, 闵敏, 董立新, 等. 星载大气探测激光雷达发展与展望[J]. 遥感学报, 2016, 20(1): 1-10.
LU Naimeng, MIN Min, DONG Lixin, et al. Development and Prospect of Spaceborne LiDAR for Atmospheric Detection[J]. Journal of Remote Sensing, 2016, 20(1): 1-10. (in Chinese)
[7] SCHUTZ B E, ZWALLY H J, SHUMAN C A, et al. Overview of the ICESat Mission[J]. Geophysical Research letters, 2005, 32(21): 101-1-101-4.
[8] CHURNSIDE J H. Review of Profiling Oceanographic Lidar[J]. Optical Engineering, 2014, 53: 1-13.
[9] WANG Xianwei, CHENG Xiao, GONG Peng, et al.Earth Science Applications of ICESat/GLAS:A Review[J]. International Journal of Remote Sensing, 2011, 32(23): 8837-8864.
[10] LEFSKY M A, HARDING D J, KELLER M, et a1. Estimates of Forest Canopy Height and Aboveground Biomass Using ICESat[J]. Geophysical Research Letters, 2005, 32(22): 202-1-202-4.
[11] NELSON R, RANSON K, SUN G, et a1. Estimating Siberian Timber Volume Using MODIS and ICEsat/GLAS[J]. Remote Sensing of Environment, 2009, 113(3): 691-701.
[12] 谢栋平, 李国元, 赵严铭, 等. 美国GEDI天基激光测高系统及其应用[J]. 国际太空, 2018, 12: 39-44.
XIE Dongping, LI Guoyuan, ZHAO Yanming, et al. U.S. GEDl Space-based Laser Altimetry System and Its Application[J]. Space International, 2018, 12: 39-44. (in Chinese)
[13] DUBAYAH R, BLAIR J B, GOETZ S, et al. The Global Ecosystem Dynamics Investigation: High-resolution Laser Ranging of the Earth′s Forests and Topography[J]. Science of Remote Sensing, 2020(1): 100002.
[14] 王春辉, 蒙裴贝, 李旭, 等. “资源三号” 02星载激光高度计收发匹配设计[J]. 航天返回与遥感, 2018, 39(5): 81-88.
WANG Chunhui, MENG Peibei, LI Xu, et al. Design of Boresight Alignment for Spaceborne Laser Altimeter of the ZY-3(02) Satellite[J]. Spacecraft Recovery & Remote Sensing, 2018, 39(5): 81-88. (in Chinese)
[15] 李国元, 唐新民. 资源三号02星激光测高精度分析与验证[J]. 测绘学报, 2017, 46(12): 1939-1949.
LI Guoyuan, TANG Xinmin. Analysis and Validation of ZY-3 02 Satellite Laser Altimetry Data[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(12): 1939-1949. (in Chinese)
[16] 曹海翊, 戴君, 张新伟, 等. “高分七号”高精度光学立体测绘卫星实现途径研究[J]. 航天返回与遥感, 2020, 41(2): 17-28.
CAO Haiyi, DAI Jun, ZHANG Xinwei, et al. Study on the Development Approach of GF-7 High Precision Optical Stereo Mapping Satellite[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 17-28. (in Chinese)
[17] 国爱燕, 戴君, 赵晨光, 等. 高分七号卫星激光测高仪总体设计与在轨验证[J]. 航天器工程, 2020, 29(3): 43-48.
GUO Aiyan, DAI Jun, ZHAO Chenguang, et al. Design and On-orbit Validation of GF-7 Satellite Laser Altimeter[J]. Spacecraft Engineering, 2020, 29(3): 43-48. (in Chinese)
[18] 陈卫标, 侯霞. 空间应用激光器[M]. 北京: 国防工业出版社, 2016.
CHEN Weibiao, HOU Xia. Laser in Space Application[M]. Beijing: National Defense Industry Press, 2016. (in Chinese)
[19] 刘琪, 孟俊清, 祖继锋, 等. 适用于空间应用的高重复频率窄脉冲电光调Q激光器[J]. 中国激光, 2017, 44(6): 43-48.
LIU Qi, MENG Junqing, ZU Jifeng, et al. High Repetition Frequency Narrow Pulse Electro-optically Q-switched Laser for Space Applications[J]. Chinese Journal of Lasers, 2017, 44(6): 43-48. (in Chinese)
[20] 陈苏园, 杨海龙, 王明建, 等. 被动调Q激光器中的纵模自然选择分析[J]. 中国激光, 2016, 43(8): 58-63.
CHEN Suyuan, YANG Hailong, WANG Mingjian, et al. Analysis of Natural Longitudinal Mode Selection in Passive Q-switched Lasers[J]. Chinese Journal of Lasers, 2016, 43(8): 58-63. (in Chinese)
[21] 孟俊清, 张鑫, 蒋静, 等. 高分七号卫星激光测高仪激光器设计[J]. 航天器工程, 2020, 29(3): 96-102.
MENG Junqing, ZHANG Xin, JIANG Jing, et al. Design of Laser Transmitter for GF-7 Satellite Laser Altimeter[J]. Spacecraft Engineering, 2020, 29(3): 96-102. (in Chinese)
[22] 黄庚华, 丁宇星, 吴金才, 等. 高分七号卫星激光测高仪分系统关键技术设计与实现[J]. 航天器工程, 2020, 29(3): 68-73.
HUANG Genghua, DING Yuxing, WU Jincai, et al. Design and Implementation of Key Technology of GF-7 Satellite Laser Altimeter Subsystem[J]. Spacecraft Engineering, 2020, 29(3): 68-73. (in Chinese)
[23] 庞勇, 李增元, 陈尔学, 等. 激光雷达技术及其在林业上的应用[J]. 林业科学, 2005, 41(3): 129-136.
PANG Yong, LI Zengyuan, CHEN Erxue, et al. Lidar Remote Sensing Technology and Its Application in Forestry[J]. Scientia Silvae Sinicae, 2005, 41(3): 129-136. (in Chinese)
Design and Implementation of the Active-passive Multi-channel LiDAR
SUN Li1YANG Jukui1WANG Yuzhao1PENG Huan1ZHANG Chenyang1YANG Chao1TANG Tianjin1SONG Zhiqing1MU Shengbo1NI Jianjun1MENG Junqing2ZHANG Chuanqiang3
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 Shanghai Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Shanghai 201800, China)(3 Institute of Spacecraft System Engineering, CAST, Beijing 100094, China)
“Gou Mang” Terrestrial Ecosystem Carbon Inventory Satellite is China’s first forestry remote sensing satellite with an active LiDAR as the main payload. As the first active and passive integrated remote sensing load in the world, the multi-channel Carbon Sinks and Aerosol LiDAR (CASAL) adopts the working mode of combining laser and camera. While using LiDAR to obtain the height information of ground vegetation, it can also realize high resolution multi-spectral imaging. This paper reviews the development situation of CASAL, including system design, key technologies and their implementation, and describes the on-orbit sun-tracking strategy as well as the atmospheric refraction correction. The related information would be helpful for the development of similar loads.
multi-channel; LiDAR; biomass; vegetation detection; terrestrial ecosystem carbon inventory satellite; space remote sensing
V447; TP79
A
1009-8518(2022)06-0027-09
10.3969/j.issn.1009-8518.2022.06.003
2022-09-06
国家重大科技专项工程
孙立, 杨居奎, 王玉诏, 等. 主被动一体化多波束激光雷达设计与实现[J]. 航天返回与遥感, 2022, 43(6): 27-35.
SUN Li, YANG Jukui, WANG Yuzhao, et al. Design and Implementation of the Active-passive Multi-channel LiDAR[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(6): 27-35. (in Chinese)
孙立,男,1983年生,2009年获南京航空航天大学工学硕士学位,高级工程师。研究方向为空间光学遥感器设计。E-mail:sunlinuaa@live.cn。
(编辑:庞冰)
猜你喜欢
摄影之友(2020年12期)2020-12-23
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
电脑爱好者(2018年17期)2018-11-05
电子制作(2018年9期)2018-08-04
中国医疗美容(2015年1期)2015-07-12
兵工学报(2011年10期)2011-02-22