
多功能考古预探测平台的设计与应用
2023-01-30 09:40:38全定可赵皓琪赵西晨董文强夏琦兴
自然与文化遗产研究 2022年6期
王 萌,全定可,赵皓琪,赵西晨,董文强*,夏琦兴
(1.西北工业大学文化遗产研究院,陕西 西安 710072;2.馆藏壁画保护修复与材料科学研究国家文物局重点科研基地,陕西西安 710072;3.西安元智系统技术有限责任公司,陕西 西安 710076;4.陕西省考古研究院,陕西 西安 710054)
针对长期处于封闭状态的地下墓穴或遗址,贸然进行考古发掘作业会给操作人员带来一定的危险,且容易对文物,特别是环境敏感的文物产生不可逆转的劣化、变质乃至损毁[1-2]。因此,为保障考古过程中的人员安全和文物应急保护,亟须通过多种技术手段对复杂埋藏环境进行考古预探测。
1 多功能考古预探测平台的研究背景
为了在不破坏墓葬的情况下对墓葬内部信息进行勘察和提取,Carlo Lerci于20世纪50年代利用内窥镜及照明拍照设备对3 500座伊特鲁里亚人的墓葬进行了预探测[3]。随着柔性光纤技术的进步,内窥镜被广泛应用于各类墓葬的勘探研究中,例如通过医学内窥镜分析木乃伊内部病理[4-5];采用工业内窥镜探测意大利、埃及等地墓葬、古迹[6]。2011—2013年,陕西省考古研究院先后在西安南郊汉代张安世家族墓地和宝鸡石鼓山商周墓地M4壁龛,利用内窥镜进行了墓葬发掘前的预判和文物信息的提取[7-9]。2022年3月,法国考古学家通过微型内窥镜对巴黎圣母院出土石棺进行探测,发现了内部的布料残骸、头发和植物残骸等。内窥镜的应用降低了墓葬发掘对文物的损伤,但由于其长度有限,仅适用于较小型的墓葬或壁龛,对形制复杂的大型墓葬难以有效探测。随着机器人技术的发展和成熟,世界上许多国家开始研发机器人装备进行考古研究[10-12],充分发挥机器人的技术集成特点,运用多种技术对考古现场进行探测。自1991年开始,德国、美国和埃及政府联合,先后采用机器人设备对胡夫金字塔进行了多次实地探索,其中“金字塔漫游者”考古机器人最为有名[13]。2006年,由哈尔滨工业大学和国家博物馆合作研发的考古机器人诞生,标志着我国第一次使用科技代替人工的方式对墓葬进行探索[14-16]。
为了获取更完成的探测信息,考古机器人逐渐向多功能方向发展。但当考古机器人集成功能过多时,必然会对其运动能力造成影响。为了同时兼顾多功能探测需求和运动能力,常用策略是将考古机器人设计为履带式/轮式结构,并适当增大体积。由于大型墓室内意味着墓主人身份尊贵、随葬等级高,往往会出土众多珍贵的陪葬遗物,履带式/轮式机器人容易对周围磕碰,对遗存遗迹造成干扰和破坏,这也是考古学家对机器人考古应用慎之又慎的重要原因。为了克服履带式/轮式机器人对探测环境的负面影响,斯坦福大学Allison M. Okamura设计了一种柔性仿生机器人,其径向尺寸较小,而纵向可通过气压延伸驱动,从而将对周围环境的干扰降到最低,但该机器人的负载能力十分有限,开发难度极高[17],距真正实用化探测还有一定的距离。以上问题是现阶段机器人考古面临的现实挑战,同时也为未来研发真正具有实用价值的机器人指明了方向。
为了合理协调机器人探测能力与运动能力的矛盾,解决部分考古学家对机器人探测的关切和顾虑,笔者团队提出了一种新型的机器人考古应用策略:将考古预探测机器人系统分为考古预探测平台和单体机器人,一方面将众多非接触式探测技术集成于预探测平台,尽可能降低单体机器人的配重;另一方面在预探测平台上预留机器人释放回收舱,通过后续搭载单体机器人的方式进一步提升探测距离。需要特别指出的是:这种机器人考古预探测策略的研发重点不再是单体机器人,而是多功能考古预探测平台,其既充分运用现有探测手段,又为未来新技术集成留有空间,被认为是现阶段较为理想的解决办法。该探测策略有望解决现阶段考古机器人多功能集成和运动能力难以兼顾的难题,能更好地适应于我国文化遗产事业的蓬勃发展。
在2020年“十三五”国家重点研发计划“重大自然灾害监测预警与防范”中的重点专项(文化遗产保护和利用专题任务)“文物出土现场应急保护技术体系研究”的支持下,团队聚焦地下埋藏环境考古预探测的实际需求,独辟蹊径设计了一款多功能考古预探测平台。该平台集成了摄像云台和照明模块、激光测距模块、环境参数采集模块、机器人释放回收舱等多种技术,可在正式发掘前对墓葬等狭小空间进行预探测,并能搭载任意符合尺寸的有线或无线单体机器人设备,拓展整体的探测能力。该考古预探测平台可为考古发掘工作和出土文物的应急保护提供重要的理论依据和技术支持。
2 多功能考古预探测平台的结构与软件设计
地下埋藏环境空间狭小、未知因素较多,存在安全隐患。针对上述情况,多功能考古预探测平台以设计合理、结构紧凑、功能多元为特点,通过人工探洞进入地下墓葬,完成对地下环境的图像采集和环境参数检测,使考古人员在进入墓室之前就能对内部环境有一定了解和判断,以便采取有力措施来减少发掘作业对遗迹遗物的非必要损害。图1为多功能考古预测平台系统的结构设计图与实物照片,主要应用于含墓室的大型墓葬遗址。平台的物理结构由固定外支撑结构、探测功能模块群、控制辅助模块群组成。其中,摄像及照明模块、激光测距模块、环境参数监控模块和机器人释放回收舱属于探测功能模块群,其余元器件属于控制辅助模块群。探测平台的外支撑结构由1515铝型材制作,整体设计为圆筒状,直径9.5 cm,能够通过墓葬盗洞或探洞进入地下作业。平台投放时通过电机或手工控制钢缆绞盘操作,同时可使用投放杆辅助。投放杆为碳纤维材质圆杆,单根长度1 m,对于地下情况复杂、距地表较深的墓葬,适当增加投放杆拼接数量,即可增大预探测深度。

图1 多功能考古预探测平台(来源:西北工业大学)
古墓内部环境昏暗复杂,为此平台集成了摄像及照明模块。其中,照明可选2种模式,即LED点阵均匀光源和红外光源,安装在摄像头两侧的主体支架上。LED光源照明的光谱如图2所示,光照能量主要集中在500~650 nm波段(约占70%)和430~470 nm(约占20%),几乎不存在紫外辐射;红外光源主要采用940 nm红外光进行照明,该波长红外光具有无红爆、辐射低、能量适中等优点。LED光源对整个地下环境进行良好的可见光照明,摄像头可对20 m内的景物的形状、外观、颜色等特征进行视频录制和文物智能识别;当墓室内存在光敏易损遗存时,平台将LED光源切换红外光源辅助摄像模块作业,所录制视频从彩色界面变为黑白界面,获取遗存除颜色之外的其他外观形状等信息。平台的空间测距模块选型为单点TOF高速激光测距模组,具体尺寸为45 mm×37 mm×13 mm,质量为32 g,工作电压9~12 V,工作电流60 mA,可方便地装配至考古预探测平台系统。该激光测距模块可用于室内和室外全天候的距离测量,测距量程为0.05~40 m,精度达1 mm。依托摄像及照明模块和激光测距模组,能够对墓室面积进行初步测量,第一时间向地面反馈墓室空间布局和遗存分布信息,以利于后续单体机器人的释放与行进策略制定。
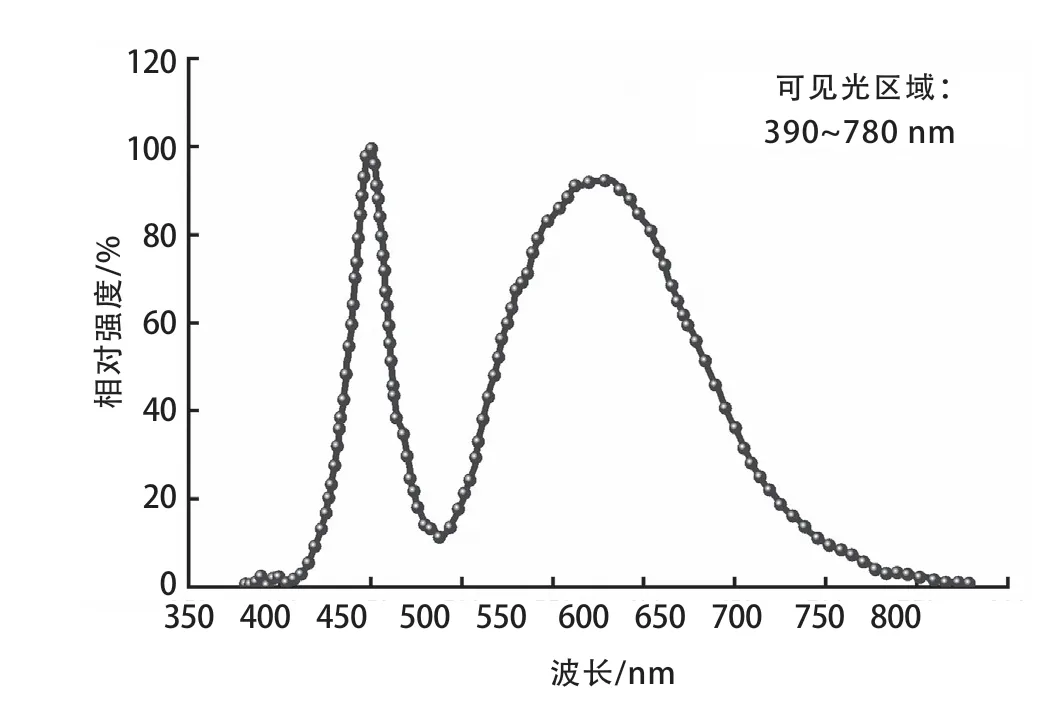
图2 LED点阵光源的光谱图(来源:原始数据来源为库力昂照明科技公司,作者改绘)
预探测平台的关节运动部件主要有2部分:第一部分用于摄像及照明模块、测距模块的运动转向控制;第二部分用于机器人释放回收舱的控制。根据搭载负荷的质量计算,平台选择25 kg舵机,配备32位MCU处理器,可进行360°旋转,尺寸为40 mm×20 mm×40 mm。各平台关节通过舵机在控制软件中进行控制,一次转动角度为15°,转速为30°/s。预探测平台预留有视频接收模块、遥控信号发射模块和有线控制线缆模块等接口,可根据不同型号的机器人进行定制集成,极大地提升了平台的可拓展性。实践中,所有能放置进入释放回收舱的遥操控机器人均可与探测平台联合作业,而机器人的遥操控信号通过平台上预留的433 MHz的LoRa透传模块进行传输,数据传输可选用单独的5.8 GHz图传模块,避免了二者的冲突。此外,预探测平台集成了各种环境参数采集模块,如温度、湿度、二氧化碳(CO2)等,采集频率10次/min,具有较高的灵敏度。环境参数采集模块会实时将采集到的数据存储到计算机,记录当前文物埋藏的环境信息,判断后续是否适用于人工作业和出土文物的应急保护。
预探测平台的控制软件是利用Python语言开发(C/S架构)的,并通过PyQt模组设计了考古预探测平台系统的软件交互界面(图3)。软件的窗口界面包含视频显示及录制、环境参数、测距结果实时显示及存储、多舵机控制界面(操控摄像、测距和机器人释放回收舱的转向动作)。其中,视频信息利用USB接口获取摄像头的实时视频流,环境信息通过调用API接口,从环境监测设备获取至本控制软件,并能够同步存储于本地;舵机的控制以USB为接口,通过调用API进行串口通信;摄像、照明、测距等模块通过舵机进行旋转作业,每次运动角度10°~30°,转速可调,上下摆动角范围为130°,左右摆动最大范围为130°;机器人释放回放舱通过舵机控制按钮实现投放和回收,相对于初始状态的最大转角为90°,可实现从竖直状态到水平状态的下放操作。

图3 多功能考古预探测平台的软件控制界面(来源:西北工业大学)
通过软件控制系统,工作人员可在地面计算机上方便地实现预探测平台的电机驱动控制、摄像头控制、空间测距、环境信息获取、单体机器人释放等功能,提升考古预探测作业的智能化和自动化,保障了人员安全。另外,本软件还可实时预览周围环境视频画面,辅助单体机器人在行进过程中主动避开障碍物,避免对现场脆弱遗存的干扰和破坏。
3 实地试验
3.1 西安机场工地墓葬试验
出于对文物安全、实施难度、试验风险等因素的考虑,多功能考古预探测平台首先于2021年7月在西安机场3期工地的1处墓葬进行验证性测试。该墓葬是1处典型的十六国贵族墓葬,地面距目标洞穴4~5 m,现场由于大开挖形成的墓道结构不稳,需要现场支护(图4 (a))。为保障人员安全,操作人员在地面采用多功能预探测平台系统对目标洞穴进行探测作业(图4 (b))。

图4 机场工地墓葬的考古现场(来源:作者自摄)
首先,通过碳纤维投放杆相接的方式,将探测平台下放至目标洞穴位置,并在地面上利用计算机控制软件启动探测平台的照明模块,为周围环境提供光源;然后,云台等摄像模块开始拍摄周围画面,并通过USB串口将视频流上载至软件界面,实现周围环境的实时预览与采集;转动摄像模块选择合适方向,利用舵机对机器人舱体进行平放操作,以利于机器人爬出作业(图5)。同时,环境监控模块对目标洞穴的温度、湿度、CO2等全程监控(图6),发现墓葬温度为25℃~27℃,相对湿度为56%~59.5%,CO2浓度为680×10-6~720×10-6。虽然本次试验场地处于开放状态,但在探测作业过程中,平台的传感器仍能全程对各种外界扰动实时反馈,具有极高的灵敏性,相关环境参数数据以10次/min的频率存储于计算机,以供地面的考古人员监测分析。该试验成功地验证了搭载平台的图像采集、机器人舱平放作业、环境参数实时监测等功能。另外,探测平台并未检测到明显的O2、NO2、SO2含量波动(故未提供数据),这意味着大开挖后墓穴环境O2组分已与周围大气发生充分交换,且O2总量较大(约占大气的21%),微小的扰动导致整体数值变化不大;而由于试验时大气质量较佳,传感器也未检测到NO2和SO2等典型酸性污染物存在。

图5 机器人舱平放动作及图像拍摄(来源:作者自摄)

图6 机场工地墓葬环境参数监测(来源:西北工业大学、西安元智系统技术有限责任公司)
3.2 铜川壁画墓葬试验
2021年11月,陕西省考古研究院在铜川市配合基建项目考古勘察时,发现1座下空的壁画墓葬,墓室内环境未知。以此为契机,考古预探测平台在该壁画墓葬中开展实地测试。该墓位于1处2 m深的市政管道基坑内,整体尚未开挖,仅在基坑底部有直径约10 cm的探洞与墓葬顶部相通。试验时,操作人员在地面利用基坑地形搭建三脚架滑轨系统,通过悬臂控制将考古预探测平台移至墓葬口上方,通过悬臂缓慢下放平台,由探洞进入至墓室内部(图7)。

图7 铜川壁画墓葬的考古现场(来源:作者自摄)
待平台下放至墓室底部后,地面人员通过系统软件对平台各功能模块进行远程操作。平台的照明和摄像模块开始工作,发现墓室的四面墙壁绘制了颜色鲜艳的壁画(图8(a)),考古专家根据绘制风格和内容题材初步判断为北魏时期壁画墓,具有极高的考古及艺术价值。壁画的部分区域出现了坍塌,说明壁画墙壁的稳定性已遭破坏,直接开发可能会造成墓室结构坍塌,需在正式发掘时采取必要措施,以保障人员安全和保护壁画完整。通过实时预览画面,选择1处较为平坦的区域进行机器人舱体的平放动作,随后单体机器人从舱内爬出进一步探测(图8(b))。预探测平台对环境参数监测结果如图9所示,可知CO2浓度700×10-6~850×10-6,温度15℃~17℃,湿度36%~46%。试验过程中,CO2浓度逐渐下降,温度和湿度均波动上升,这表明墓室环境被扰动,外界气流与墓室内部气流发生了交换[18]75。最后,探测平台的测距模块分别在墓室顶部、中部和底部进行了水平测距(图10),探测到墓室顶部平面较小,而中部平面和底部平面相对较大,表明该墓葬可能为穹顶式空间结构,这为判断墓葬形制提供了重要依据。
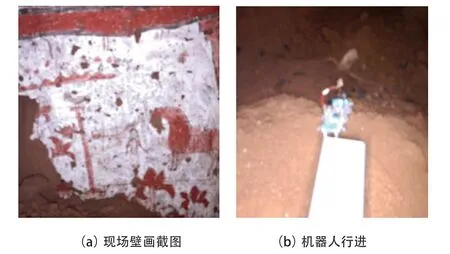
图8 探测平台墓室内拍摄及机器人释放作业(来源:西北工业大学)

图9 铜川壁画墓葬环境参数监测(来源:西北工业大学、西安元智系统技术有限责任公司)

图10 铜川壁画墓葬水平面测距结果(单位/m)(来源:西北工业大学)
2处墓葬环境实地测试,验证了多功能考古预探测平台的功能性、有效性和适应性,总体测试结果符合预期。作业人员通过便携式计算机全程在地面操纵,保障了人员安全;摄像云台模块搭配照明设备,能够对墓室环境实时环拍,视频清晰度良好,预览画面流畅;测距模块可对墓室整体布局进行测量,给出墓室面积和文物分布情况;机器人舱动作准确,能够搭载机器人进一步拓展探测范围;环境监测模块能够全程监控考古环境的温湿度、CO2等环境参数,灵敏度高。通过调查和了解地下埋藏文物遗存状况和墓室空间布局,不仅有助于判断墓葬年代,也为后续现场文物的保护提供了现实依据。
4 预探测平台对文化遗产保护的贡献机制
本文所介绍的多功能考古预探测平台的应用场景多为地下结构为内含空间的土洞墓和砖、石结构墓葬,可延伸应用场景至一些人工难以企及的崖墓、石窟等,该类遗址有较大的空间且内部文物遗存丰富亟须勘察保护。本平台从实际需求出发,创造性地集成了多个探测功能模块,旨在正式发掘之前实现对墓葬遗址内部的有效探测,以更加主动的姿态为文物保护作出贡献。预探测平台在文化遗产保护的贡献机制主要体现在以下4个方面。
4.1 墓葬内文物遗存识别与价值发现
在抢救性发掘时,预探测平台的紧凑型筒状结构(<10 cm)可代替人工通过狭窄通道进入墓室,平台上所集成的照明和摄像模块可对墓室环境进行拍照和录制视频,辅助考古现场工作人员对墓葬内文物遗存进行摸查,更好地为下一步的墓葬发掘和保护做铺垫。预探测平台拥有LED点阵光源和红外光源,前者可满足普通情况下的可见光照明需求,而当墓室内可能存在对光敏感的文物遗存时,如长期埋藏在阴暗潮湿地下的脆弱有机文物突然受到紫外线的强辐射会使其产生物理性质的改变进而引发劣化,平台可切换红外照明模式,最大限度地减少光线对于文物的破坏[19-21]。通过考古预探测平台,在墓葬探测阶段实现对地下文物的形态、数量、位置等基本数据的可视化分析和识别,为判断墓室形制布局以及随葬文物规格等级提供了有价值的第一手资料。
4.2 墓葬结构稳定性判断与文物安全提取
墓葬发掘过程中的结构稳定性关系着考古队员的生命安全和地下文物遗存的安全赋存,一旦发生坍塌将会带来极其严重的后果。预探测平台在铜川壁画墓葬实地试验时,发现下空墓室的四周墙壁绘制有精美壁画,根据壁画内容初步判断为魏晋时期墓葬,此时期壁画墓在陕西省内较为罕见。为了能够完整揭取壁画,发掘队员曾计划直接进入墓室进行作业,但通过预探测的摄像发现壁画一侧壁面出现坍塌情况,测距模块探测到墓室底部脱落壁画的地仗层形成堆积,并通过释放单体机器人进一步证实了墓室结构有失稳风险。通过对预探测结果分析,发掘队员制订了细致、周密、稳妥的揭取方案,在保障人员安全的同时,对壁画尽可能完整的揭取和保存。
4.3 墓葬内微气候监测与文物病害预防
在考古发掘过程中,由于埋藏环境骤变引起的文物损害十分严重。文物保存的微环境条件中,影响最为显著的是温度与相对湿度的变化,温度和湿度能够加速侵蚀化学反应的速度,温、湿度的频繁波动还会导致文物材质的物理形变,甚至不同的材质在接触面发生卷曲、剥离或崩裂,如漆木竹器类文物出土后,若不采取保湿措施,则会快速脱水、皱缩、变形[19,22-23]。对于部分无机质文物,温、湿度的剧烈变化还会导致盐蚀危害。相较于保存阶段,文物在出土阶段本体劣化和病害发展尤为严重,给文化遗产的保护和延续带来严峻挑战,而此阶段施加文物保护手段的效果也更明显。预探测平台集成的温度、湿度等模块,能够监测墓葬内微气候信息,预判出土文物劣化风险。针对受微气候条件波动影响较大的文物遗存,在考古发掘过程中同步介入有针对性的文物现场保护措施,有效预防文物病害诱发与恶化,最大限度地保留出土文物资料的完整性,不仅为后续的考古研究保留更多信息[20,23],还对文化遗产的安全保存和价值延续意义重大。
4.4 墓葬内大气环境调查与文物应急保护
2013年曹军骥等人对西汉张安世家族墓葬M1墓室内的大气环境调查发现,在待发掘墓葬内的O2含量低于大气中平均含量,而CO、CO2、CH4等含量远高出全球本底值[18]73-75,据此判断墓葬内存在有机质文物遗存,其腐败分解和微生物活动消耗了墓室内O2和释放出CO2等气体。墓室的低含氧气氛有利于文物原始状态的保存,而当墓室内外发生气体交换后,会加速纤维类文物的氧化、尸体类文物的腐烂、陶制彩绘的脱落及金属制文物的腐蚀等,且外界的酸性气体如NO2、SO2等也会侵蚀文物本体而导致更严重的病害。特别指出的是,由于NO2、SO2等酸性气体主要来自外界大气污染,通过对比墓室内部和墓葬洞口附近地表的酸性气体含量差异,有助于判断墓室内外大气交换程度,更全面反映赋存环境扰动对遗存安全的影响。探测作业时,平台通过摄像模块与CO2、O2、NO2、SO2等多种气体传感器关联应用,可同步获得墓室内视频信息和大气成分信息,进而综合判断文物遗存状态。对已观察到的脆弱文物遗存采取及时抢救性的应急保护措施干预,尽量杜绝外界气体对文物遗存的不利影响。如若出土现场不具备保护条件或大气中酸性气体浓度较大,可将探孔暂时封堵或注入惰性气体,以避免内外气体流通引起的文物劣化。
5 结束语
针对地下墓葬空间狭窄、存在未知危险等问题,提出了一种具有实用化价值的多功能考古预探测平台,并通过实地测试验证了其功能性、有效性和适用性,为出土文物的应急保护和价值存续提供理论依据和技术支撑。其具有以下优势:①平台整体结构紧凑,能够通过直径小于10 cm的探洞进入大型墓葬环境进行预探测,空间适用性强;②平台集成了照明摄像、高速激光测距、环境参数采集、机器人舱等多种探测技术,大大提高了探测效率;③人员可在地面通过软件控制平台实现墓葬环境的考古探测,保障了人员安全,自动化和智能化程度高。综上所述,依托多功能考古预探测平台,能够对地下环境尤其是抢救性发掘的墓室遗址进行有效探测,发挥现代科技在遗址勘察和文物保护的积极作用,实现遗存综合判别、文物劣化因素监控等目标,对于我国文化遗产事业具有重要意义。
猜你喜欢
交响-西安音乐学院学报(2023年1期)2023-08-03 05:37:58
收藏与投资(2022年5期)2022-05-31 19:58:15
社会科学战线(2022年2期)2022-03-16 06:38:42
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
自动化学报(2019年12期)2020-01-19 05:18:14
艺术品鉴(2019年8期)2019-09-18 01:22:40
电子制作(2019年7期)2019-04-25 13:17:10
动漫星空(兴趣百科)(2018年6期)2018-10-25 12:21:36
电子测试(2018年4期)2018-05-09 07:27:32
大众考古(2015年11期)2015-06-26 08:45:32
