蛙人探测系统目标强度测试能力验证试验研究
2023-01-16 03:00唐天一段立晶
测试技术学报 2023年1期
刘 洋, 唐天一, 段立晶
(1.大连测控技术研究所, 辽宁 大连 116013;2.上海船舶电子设备研究所, 上海 201108)
0 引 言
无论是声纳设计还是使用声纳设备, 都需要对探测目标的目标强度值作出估计, 因此, 对各类声纳目标的目标强度值进行试验测量在工程应用上具有重大意义。 蛙人探测系统是重要的水下对抗装置, 通常用来在港口、 码头、 近岸或者舰艇锚泊时, 对水下蛙人、 无人潜航器或者微型潜艇等进行探测、 识别或实施对抗等[1-3]。 本文旨在利用蛙人声纳探测系统测量低目标强度值的水下运动目标。 鉴于该系统具有全向搜索的特点, 用该系统测量低信混比的水下运动目标的声目标强度时, 可进行实时波束扫描, 在指定方向上预成波束、 跟踪定位, 然后采集回波数据并测量其量值。为验证研制的蛙人探测系统测试目标的声目标强度的能力, 本文利用该系统测试一个目标强度低至-20 dB的标准球体, 将测试结果与理论计算结果比较, 若吻合较好, 可证明应用该系统测试目标强度低至-20 dB的目标是可行的。
1 研究过程
1.1 试验场地与系统组成
试验中, 试验船泊在一水域开阔的湖上, 湖水最深处约60 m, 中间水井长24 m, 宽8 m, 试验船中间有若干可开启井口, 便于声设备的吊放。此次试验使用一个临时转台吊放蛙人声纳探测系统设备。 以标准球体作为目标, 由另一试验船将其拖曳在指定区域运动。 测试系统组成框图如图1所示。 图中, 定位信标1、2及定位接收水听器1、2, 基于短基线水声定位方法, 利用球面交汇法解算出目标方位, 调整蛙人探测系统主波束至目标方向。

图1 测试系统组成框图Fig.1 Constitute of test system
1.2 测试系统组成与参数设置
采用窄指向性发射、接收合置测试系统声设备, 可有效抑制混响, 确保采集数据信混比, 如图2所示。 信号形式为单频和宽带调频两种。 标准球体半径为200 mm, 厚度为5 mm, 理论计算其声目标强度为-20 dB。

图2 窄指向性多通道收发阵Fig.2 Narrow directional multi-channel transceiver array
1.3 蛙人探测系统设计
探测系统工作频率为75 k Hz~150 k Hz, 接收阵采用双44通道设计, 圆弧阵型覆盖水平90°开角, 垂直开角9.2°@100 k Hz, 具备信号放大、滤波、 可变增益控制等功能。 调理信号数据打包后, 利用光纤通道实时发送至上位处理机进行正交解调、 波束形成、 脉冲压缩等实时信号处理。 圆弧发射阵覆盖水平45°开角, 垂直开角9.7°@100 k Hz, 采用8通道发射机设计, 单通道功率400 W, 功率档位在200 dB~215 dB可调, 支持CW,LFM 两种信号类型[4]。
信号处理流程如图3所示, 首先对输入信号进行数字下变频,44路信号乘下变频信号, 信号的频率移到零中频, 然后信号通过低通滤波器滤除高频分量, 滤波后信号频带主要在低频, 通过1/6抽取降低基带信号采样率[5]。 通过数字下变频后, 波束形成和脉冲压缩都可在基带进行处理[6-7]。

图3 信号处理流程图Fig.3 Signal processing flow chart
波束在形成过程中先进行相位补偿, 然后再通过时延补偿实现信号对齐。 如果单纯采用相位补偿, 一般只适用于窄带信号, 而时延补偿方法则需要采样率远高于奈奎斯特频率。
1.4 测试方法及测试过程
目标强度测试采用直接法。 测试过程如下:
1) 收发系统安装于泊船的吊杆上, 布放深度为水下10 m;
2) 另一条试验船拖曳着标准球体离开泊船,在距离60 m 处指定区域开始运动, 标准球定深10 m;
3) 水声定位系统首先利用GPS时间同步授时装置输出1 PPS秒脉冲信号对标准球体两端的信标进行时间同步, 当信标锁定秒脉冲同步信号时, 即使撤去GPS同步信号, 信标仍能依靠内部晶振保持和GPS授时系统时间同步。 信标利用同步信号触发电路, 信号处理系统输出单频或宽带调频信号到功率放大电路, 进而驱动发射换能器发射声信号, 泊船上声定位接收系统的接收水听器在远处接收信标声信号, 经信号调理器放大滤波后送到综合处理机, 在综合处理机中解算出距离、 位置信息。
4) 根据定位结果确定出目标球的大致位置,将蛙人探测系统声阵主瓣转向标准球方向, 并在该方向上预成波束, 发现并标定目标位置和方位角, 同时开始采集该波束覆盖的阵元接收的标准球回波数据;
5) 泊船上的标准水听器接收蛙人声纳发射的直达声信号, 实时采集记录。
2 研究结果
2.1 数据处理方法
结合蛙人探测系统的校准结果, 处理其接收的标准球回波数据, 得到标准球目标强度, 与设计值进行比对。
由主动声纳方程可求出标准球体的目标强度TS球[8]

式(1)中应计算的量包括:
1) 蛙人探测声纳接收到的标准球回声级为

式中:Vff为蛙人探测声纳接收到的标准球回波信号电压有效值;Mp为蛙人探测声纳接收换能阵的接收灵敏度;A为接收放大模块的放大倍数。
2) 由介质确定的参数传播损失TL为

式中:r为标准球体与蛙人探测系统发射之间的距离。 这里用球面波扩展损失, 且淡水环境中声吸收衰减远小于海水环境, 可不考虑水的声吸收衰减。
式(3)中,
式中:t为蛙人探测声纳接收的回波信号的起始时间;c为水中声速。
3) 蛙人探测声纳的发射声源级SL为[9]

式中:Uff为标准水听器在距离r1上测得的直达声电压的有效值;r1为蛙人探测系统与标准水听器之间的距离;M为标准水听器的接收灵敏度。
2.2 结果数据
定位信标标定标准球区域如图4所示,2个半弧中间为标准球出现的位置, 横纵轴表示探测区域的位置坐标, 单位为m。
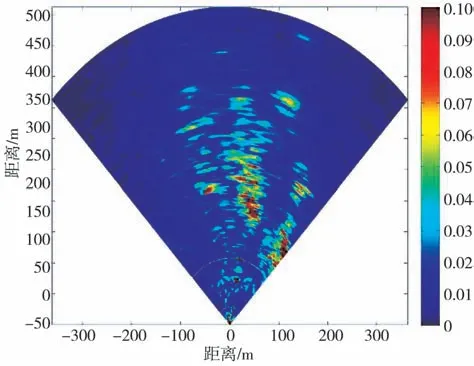
图4 定位信标标定标准球回波区域Fig.4 Demarcate standard ball echoes by orientation beaconing
预成波束确定标准球位置如图5所示。
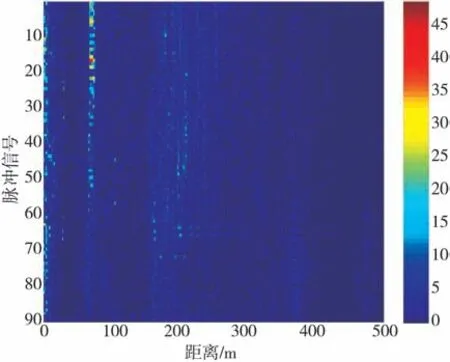
图5 预成波束后标准球回波历程Fig.5 Standard ball echoes course after beam-riding
2.3 实测结果与理论计算结果比较
对湖上实测数据进行处理, 处理结果见图4~图6。 图4、 图5分别为定位信标标定标准球回波区域和预成波束后标准球回波历程处理结果。 图中色棒为回波强度电压有效值, 单位为V。

图6 实测结果与理论计算结果比较Fig.6 Compare test results with the theory calculate result
图6为标准球实测结果与理论计算结果的比较, 从图中可以看出, 测试结果数据有一定的起伏, 主要由于目标球在被拖曳过程中存在上下起伏运动, 未按预期定深运动造成, 但经平均后均值为-19.3 dB, 与-20 dB的理论计算结果基本一致[10]。
3 结 论
为验证蛙人探测系统测试目标强度的能力,应用该系统在湖上测试一个目标强度理论值为-20 dB的标准球体, 测试结果与理论仿真结果吻合较好, 证明了应用该系统探测目标强度低至-20 dB的目标是可行的。
猜你喜欢
小哥白尼(军事科学)(2022年5期)2022-08-17
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
小哥白尼(军事科学)(2019年9期)2019-12-21
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
火控雷达技术(2016年2期)2016-02-06