
联合三阶Keystone变换与相关函数的机动目标补偿算法
2023-01-09 08:46郭晓乐武正翔王善松杨雪亚
雷达科学与技术 2022年6期
郭晓乐, 武正翔, 王善松, 张 科, 杨雪亚
(1. 中国电子科技集团公司第三十八研究所, 安徽合肥 230088; 2. 孔径阵列与空间探测安徽省重点实验室, 安徽合肥 230088; 3. 中国人民解放军63629部队, 北京 102600)
0 引 言
随着武器装备的不断更新发展以及新型吸波材料的应用,战斗机、导弹等空中目标的有效截面积越来越小,反射系数越来越低,信噪比越来越小。对于传统的机载脉冲多普勒(Pulse Doppler, PD)雷达而言,通过多个脉冲进行相参积累从而提高目标信噪比,达到从噪声中检测出目标的目的[1-3],对于信噪比很低的弱目标,PD雷达为了能够提高检测的信噪比,需要不断增加相参积累的时间,但是当积累时间增大时,由于目标的高速高机动会引起多个脉冲跨越多个雷达的距离分辨单元[4-6],导致相参积累的能量分散到多个距离单元,此外,目标回波的高阶相位项还会导致多普勒的频率走动,导致目标回波能量在多普勒频道上出现散焦的现象,距离单元的走动和多普勒散焦的现象都会降低机载PD雷达的检测性能。现有的基于目标速度的包络补偿算法需要准确知道目标的速度来对接收脉冲串进行脉间和脉内的补偿;而普通的Keystone变换方法[7-11]虽然不用准确已知目标速度,可以对目标速度进行估计,但是这种方法只能补偿目标速度导致的距离走动,而忽略了高机动目标的高阶运动参数对相参积累的影响,因此只适用于低机动目标检测或短时间积累的场合;广义拉东-傅里叶变换[12](GRFT)和拉东多项式-傅里叶变换[13](PRPFT)等算法虽然可以实现对目标各阶距离走动的消除和相位的补偿,但是都需要对目标参数进行多维度搜索,运算量比较大,非常不适用于工程实现。
针对高机动目标的运动补偿问题,本文提出了一种基于联合三阶Keystone变换、相关函数与尺度变换的距离维和多普勒维走动校正方法。首先对接收信号进行传统的脉压处理,然后通过对慢时间进行三阶Keystone变换处理,消除由目标加加速度导致的距离走动,接着对三阶Keystone变换结果分别进行频移后,将两个信号进行共轭相乘并进行距离维的IFFT处理,紧接着构造自相关函数,进行慢时间变量的相参积累,到这里可以补偿掉机动目标引起的所有距离走动现象;之后对自相关函数的慢时间变量进行尺度变换,并对尺度变换后的信号针对时延和慢时间进行二维FFT变换,从而消除掉目标的多普勒散焦现象,得到目标聚焦峰值点,顺利地进行目标检测。
1 高机动目标回波模型
对于PD雷达而言,雷达发射的基带信号为线性调频信号(LFM),信号模型可以表示为
(1)
式中,t为单个脉冲持续的时间,即快时间,T0为发射脉冲宽度,fc为雷达载波频率,K为线性调频信号的调频斜率,t为脉内快时间,矩形窗函数定义为
(2)
假设PD雷达发射的脉冲数为M,脉冲重复间隔为Tr,则脉间的慢时间序列可以表示为tm=mTr(m=0,1,…,M-1)。假设一个相对雷达做高机动运动的目标,初始距离、径向速度、加速度和加加速度分别表示为R0,c1,c2和c3,则高机动目标相对于雷达在tm时刻的瞬时距离可以表示为
(3)
经数字解调后,接收回波信号数据的基带信号可以表示为
(4)
式中,Ar为回波信号的幅度,c表示光速,λ=c/fc表示雷达波长。
对上述的基带回波信号进行距离维脉冲压缩,可得脉压后的回波信号为
(5)
式中,Ac为脉冲压缩后回波信号的幅度,B=KT0表示雷达信号带宽。
在PD雷达中,一般情况下,目标具有多普勒模糊,即目标的速度表示为
c1=c0+Nambvamb
(6)
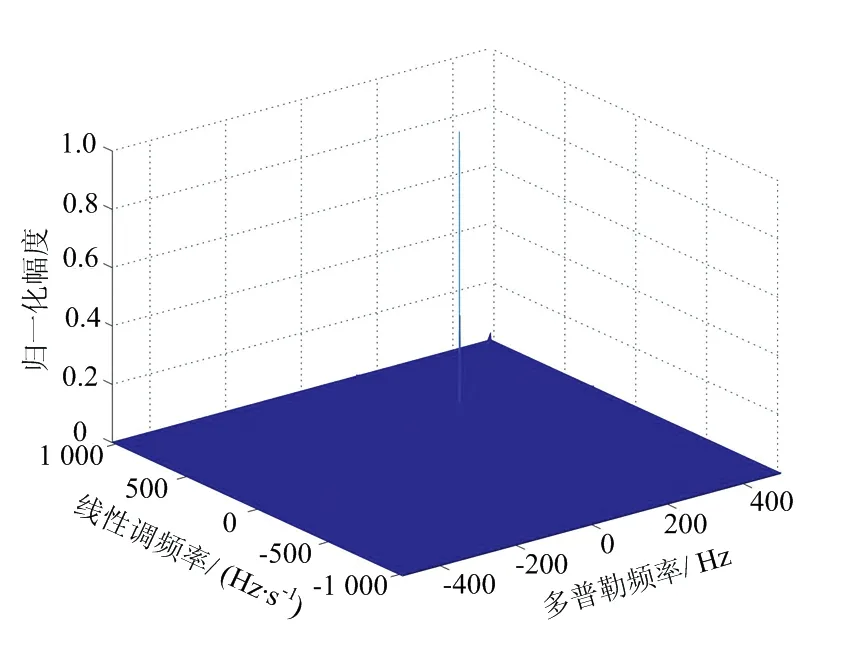
式中,Namb为多普勒模糊次数,vamb=λ/(2Tr)为雷达的最大不模糊速度(盲速),c0=mod(c1,vamb)为目标的基带速度,满足|c0| 将式(3)和式(6)代入式(5),式(5)中脉压后的回波信号可以表示为 (7) 式中: (8) 由此可以看出,脉压后的回波信号可以简化为 (9) 由上式可以看出,脉压回波在快时间维的sinc函数包络位置随着慢时间tm的变化而变化,并且慢时间维的高阶相位项会导致多普勒谱发生展宽。当雷达进行长时间积累时,目标的能量在距离维和多普勒维都会产生跨单元走动的现象,这样会严重影响目标的检测。 对式(9)进行距离维的FFT,可得 (10) 式中,f为t对应的距离频率分量,Af表示傅里叶变换后的雷达信号幅度。 由式(9)和式(10)可以看出,目标在距离维和多普勒维产生的单元走动现象是距离频率变化量f与慢时间变量tm之间存在耦合反应到快时间维的结果所致,因此要校正距离维和多普勒维产生的单元走动现象,就需要消除距离频率变化量f与慢时间变量tm之间的耦合关系。 针对高速运动目标,Keystone变换被提出并广泛的应用,Keystone变换实际上是通过对慢时间轴进行尺度变换来消除距离频率变化量f与慢时间变量tm之间的耦合,从而校正目标的距离走动,对式(10)中的慢时间tm通过下式替换: (11) 式中,tn可以表示为虚拟的慢时间变量。 Keystone变换可以认为是一个慢时间维的信号重采样过程,将式(11)代入式(10)可得 (12) 针对窄带雷达环境(f远小于fc)而言,将上式关于f进行一阶泰勒展开,可得 (13) 由式可以看出,经过了Keystone变换后,目标的基带速度引起的距离走动得到了有效消除。然而,上式中距离频率f和慢时间tn之间仍然存在耦合现象,说明Keystone变换只能校正目标基带速度导致的距离走动,然而目标的高阶运动参数和多普勒模糊导致的走动仍然没有被有效校正。 由于目标的加加速度c3会导致距离弯曲现象,本文引入三阶Keystone变换的,变换的关系如下: (14) 将式(14)代入式(10),并关于f进行一阶泰勒展开,可得 (15) 由上式可以看出三阶Keystone变换消除了由目标加加速度导致的距离走动现象,而由于目标速度和加速度导致的距离走动有剩余。接下来开始消除这两项的距离走动现象,本文构造式(15)信号的相关函数为 (16) 上式中定义的相关函数实际上是对三阶Keystone变换结果分别进行频移后,再将两个信号进行共轭相乘的过程,紧接着对Sc2(tn,f)进行距离维的IFFT处理,可以得到 (17) 式中,Ac2表示IFFT后信号幅值。 式(17)可以看出,经过相关处理后,机动目标的能量集中到同一个距离单元,距离走动得到了有效消除,并且慢时间维的三阶相位项也得到了消除,针对式(17)中的慢时间变量可以重新建模为一个LFM,如下: (18) 式中,A=Ac2exp(-j2πBR0/c)表示幅值,f0=-B(2c0/3+Nambvamb)/c为等效载频,K0=-2Bc2/(3c)为等效调频斜率。经过上述所有的处理,可以说所有脉冲的脉内脉压都压到了同一距离单元,紧接着看是进行脉间的相参积累。 针对式(18)慢时间变量进行相参积累,本文通过自相关处理实现[14]。构造以下的自相关函数为 A2exp[j2πf0(τ+a)+j2πK0· (τ+a)tn] (19) 式中,τ为一个时延变量,a为一个固定的时延。 从式(19)可以看出经过自相关处理后,tn和τ之间出现了耦合现象,这会导致该自相关函数的二维频谱也出现跨单元走动的问题,紧接着开始解决这一问题,本文定义如下的尺度变换: (20) 式中,h表示一个尺度因子,是一个常量。 将式(20)代入式(19),可得 (21) Affexp(j2πfτ)sinc(fτ- (22) 根据式(22)可以看出,经过二维FFT处理后,目标的能量会聚焦为一个谱峰,此峰值可以进行目标检测。 本小节对所提方法的运算复杂度进行分析。假设Nr和M分别表示雷达回波的距离单元个数和脉冲个数。本文方法首先利用三阶Keystone变换进行部分的距离校正,所需的运算复杂度为O(MNrlog10(M));紧接着频移互相关处理和距离维的IFFT处理所需的运算复杂度为O(MNrlog10(Nr)),最后,尺度变换后对慢时间维的二维FFT变换需要的恶运算复杂度为O(M2log10(M))。综上所述,本文所提方法的总的运算复杂度为O(MNrlog10(M)+MNrlog10(Nr)+M2log10(M))。 GRFT和PRPFT都是基于全参数搜索的算法,需要对目标初始距离和目标运动参数进行四维搜索,假设NRs、Nc1s、Nc2s和Nc3s分别表示目标初始距离、径向速度、加速度和加加速度的搜索次数,则这两种方法需要的运算复杂度为O(MNRsNc1sNc2sNc3s)。如果假设M=Nr=NRs=Nc1s=Nc2s=Nc3s=N,则本文方法的运算复杂度约为O(N2log10(N))量级,而GRFT和PRPFT的运算复杂度约为O(N5)量级,由此可知,本文所提方法运算量远小于GRFT和PRPFT这两种方法。 综合前面的所有分析,联合三阶Keystone变换、相关函数与尺度变换的距离走动和多普勒走动补偿处理的流程有: 1) 高机动目标回波数据进行脉冲压缩处理,得到脉压回波数据; 2) 距离维的FFT,得到距离频率变化量f与慢时间变量tm之间的耦合关系; 3) 对慢时间进行三阶Keystone变换处理,消除由目标加加速度导致的距离走动; 4) 对三阶Keystone变换结果分别进行频移后,将两个信号进行共轭相乘; 5) 进行距离维的IFFT处理; 6) 构造自相关函数,进行慢时间变量的相参积累; 7) 对自相关函数的慢时间变量进行尺度变换; 8) 对尺度变换后的信号针对时延和慢时间进行二维FFT变换,得到目标聚焦峰值点。 处理流程如图1所示。 图1 联合三阶Keystone变换、相关函数与尺度变换的距离走动和多普勒走动补偿流程图 为了验证本文方法的有效性,进行一个典型参数的仿真实验来验证本文方法的有效性,表1给出了雷达系统的仿真参数。 根据表1中所列的仿真参数,对高机动目标进行仿真处理。图2给出了仿真参数下,高机动目标回波的脉压结果,由图可知,目标的高机动运动导致严重的距离走动,距离走动了164个距离单元。紧接着对回波信号进行三阶Keystone变换处理,消除由目标加加速度导致的距离走动,之后 Keystone变换结果分别进行频移后,将两个信号进行共轭相乘,进行距离维的IFFT处理,并构造自相关函数处理,得到慢时间变量的相参积累,图3给出了联合三阶Keystone变换与相关函数的距离走动补偿后归一化能量图,由图可知,经过处理后虽然目标的距离走动被补偿掉了,但是在多普勒频道上面出现了散焦。紧接着进行流程中的7)、8)两步,得到图4所示的慢时间尺度变换后二维FFT处理结果,从图可见目标能量在二维平面上积累为一个谱峰,可以准确地实现目标检测。 表1 雷达系统的仿真参数 图2 所有脉冲序列接收回波脉冲压缩结果 图3 联合三阶Keystone变换与相关函数的距离走动补偿后归一化能量图 图4 慢时间尺度变换后二维FFT处理结果 由于目标的高速高机动会引起相参积累的能量分散到多个距离单元,并且目标回波的高阶相位项还会导致多普勒的频率走动,导致目标回波能量在多普勒频道上出现散焦的现象,距离单元的走动和多普勒散焦的现象都会降低机载PD雷达的检测性能。针对高速高机动目标的运动补偿问题,本文提出了一种基于联合三阶Keystone变换、相关函数与尺度变换的距离维和多普勒维走动校正方法。通过三阶Keystone变换和构造的自相关函数补偿掉机动目标引起的所有距离走动现象,并且通过慢时间变量的尺度变换来消除多普勒的散焦现象,最后得到目标聚焦峰值点。仿真实验验证了方法的有效性。

2 传统的Keystone变换进行走动补偿
3 联合三阶Keystone变换、相关函数与尺度变换的距离维和多普勒维走动校正
3.1 距离走动校正


3.2 多普勒频率走动校正



3.3 运算复杂度分析
4 处理流程及仿真实验




5 结束语
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
北京航空航天大学学报(2021年9期)2021-11-02
装备制造技术(2020年3期)2020-12-25
医学新知(2019年4期)2020-01-02
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2017年4期)2017-11-23
知识文库(2017年21期)2017-10-20
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
国外科技新书评介(2014年12期)2015-01-05
