基于图像处理的农产品茶叶杂质分拣识别
2023-01-08 01:38徐涛
山东农业工程学院学报 2022年12期
徐 涛
(武夷学院,福建 武夷山 354300)
传统的人工分拣方式不仅效率低下,而且错误率较高,导致茶叶制作环节的成本居高不下。为了解决这一问题,相关研究人员积极尝试建立茶叶杂质自动化分拣系统。目前,市面上常见的茶叶杂质自动分拣系统以茶叶的颜色作为主要区分对象,依据目标图像的阈值对其进行分类与判定。这种自动化分拣模式存在一定的局限性,如果杂质与茶叶的颜色相近,则自动分拣系统无法准确识别杂质,需要再利用人工分拣的方式去除杂质。而图像处理技术的不断成熟,为优化茶叶杂质分拣系统提供了技术支撑。借助图像处理技术,茶叶杂质分拣系统能够实现对于茶叶与杂质外形特征的分类,在不依靠颜色阈值的情况下,实现对于杂质的准确识别,显著提升茶叶杂质分拣系统工作效率,拥有广阔的应用前景。
1 图像处理技术分析
图像处理技术在多个领域发挥着重要作用,初级图像处理技术可以对图像边缘进行锐化,并执行简单的降噪预处理。中级图像处理技术能够对图像进行智能分割,并对物体外形进行描述。高级图像处理技术,能够对物体进行精准识别。采集图像过程中,由于摄影器材、光线以及物体表面特征存在差异,因此图像会出现噪声,令采集到的图像与原始图像不相符,因此需要利用图像处理技术对采集到的图像进行降噪预处理[1]。
1.1 图像灰度化
基于计算机视觉的茶叶杂质分拣系统运行过程中,需要对图像进行灰度化处理,将彩色图片转化为灰度图。以笛卡尔坐标系作为基础,由红色(R)、绿色(G)、蓝色(B)作为基础原色组成不同颜色,则每一个RGB分量都拥有28的灰度等级(如图1所示)。

图1 RGB色彩模型空间示意图
每一个分量代表一种颜色的灰度值,也可以将其称之为亮度值、强度值。目前,计算机主要通过平均值法、分量法以及最大值法对图像进行灰度化处理。
平均值法的原理是通过计算彩色图像三个分量强度值的平均数,确定图像的灰度值。

分量法是提取图像某一个分量的亮度值,将其作为该图像的灰度值,依据实际需求选择不同的分量。

最大值法是将图像亮度值中的最大值,视为该图像的灰度值。

公式(1)(2)(3)中,f为图像的灰度值,(i,j)为像素点坐标。
在实际识别过程中,如果想要得到质量更高的灰度图像,可以使用不同的权值对三个分量进行加权平均计算。本次设计中,工作人员对茶叶彩色图像进行加权平均处理,得到了相应的灰度图像(如图2所示)。

图2 茶叶杂质分拣图像灰度图
1.2 图像平滑
拍摄图像过程中,在各种外界因素的影响下,图像会产生噪声,要通过平滑处理消除噪声的影响,为后期图像处理工作打好基础。目前常用的图像平滑技术包括均值滤波法以及加权平均值滤波法等。
1.2.1 均值滤波法
利用均值滤波器,将彩色图像上的目标像素点 (x,y)以及与该像素点相邻的像素点灰度平均值,视为当前的像素点。例如,目标像素点为f(x,y),图像平滑处理后的像素点为g(x,y),则均值滤波计算公式为:

公式(4)中,变量M为邻域像素点总和,S为目标像素点(x,y)的邻域。
如果将平滑滤波模板设定为3×3,则可以得到:
1.2.2 加权平均值滤波法
均值滤波法的弊端在于对于所有的像素点进行统一处理,因此会导致图像变得模糊。为了提升图像的清晰度,可以通过加权平均的方式对均值滤波法进行优化,即加权平均值滤波法。

公式(6)中,w(s,t)为掩膜系数。通过加权平均计算,可以对公式(5)进行优化:

观察公式(7)可以发现,与中心点越接近的像素点,其权值越高,对于中心点的影响越明显,是一种经常被使用的平滑模板,经过该模板处理的图像较均值滤波法处理的图像更为清晰。
1.3 边缘检测
在分析图像过程中,边缘信息有着很高的使用价值,且图像边缘区域像素灰度值变化很大,计算图像边缘灰度值梯度,确定图像边缘的方向以及强度。
边缘检测算子:常用的边缘检测算子包括Robert算子、perwitt算子等。前者属于一阶微分算子,可以利用差分法计算梯度值[2]。

其对应的2×2模板如下(如图3所示)。

图3 Robert算子模板
后者是一种一阶微分算子,在经过边界检测之后,其图像可以表示为:

其对应的3×3模板如下(如图4所示)。
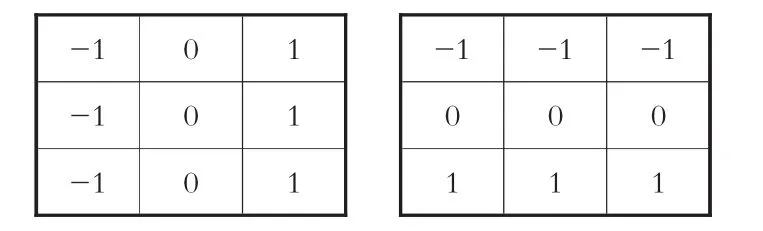
图4 perwitt算子模板
通过对图像进行边缘检测,最终得到目标图像边缘的清晰图像(如图5所示)。

图5 目标图像边缘示意图
2 霍夫直线变换
针对直线的识别,是茶叶杂质分拣中的一项重要内容,通过对图像中呈现出直线形状的物体进行精准识别,提升杂质分拣准确率。目前,直线检测已经在多个领域得到了广泛应用,特别是在交通、缺陷检测等方面,发挥了巨大的作用。直线检测技术多种多样,一种霍夫直线变换是较为可靠的一种技术。该技术的优势在于能够忽略图像中的噪声,针对局部被覆盖或者遮挡的目标也能有效识别。霍夫直线变换是一种穷尽式搜索技术,因此其计算较为复杂,为了提升图像识别效率,需要对该技术进行优化。
2.1 两点组合表决算法
基于霍夫变换原理,图像中目标像素点与参数空间中的某一条曲线对应,同时参数空间中的点,也对应着图像中的一条直线,二者之间存在映射关系。因此,在运用霍夫变换时,需要计算图片像素点对应参数空间曲线的函数值,这种计算方式涉及庞大的计算量,会影响运算效率。
在平面图像中,在确定了两个点之后就可以得到一条确定的直线,该直线对应参数空间中的某一个点,立刻该映射关系就可以省去对于参数空间中其他参数的计算,即两点组合表决算法。而在实际计算过程中,如果直接使用该计算方式,并不会显著降低计算量,因此需要将图像分割为多个子图像块,具体流程如下:
①将图像分割为Ns个子图像。
②在子图像中任意选取两点,标定为(xi,yi)(xj,yj),运用两点组合表决算法进行计算,根据公式(9)得出两个点之间的空间参数ρ、θ,同时对累加单元 Q(ρ,θ)进行投票,得到参数累加峰值,以此来计算每一个子图像中直线参数ρ、θ的数值。
③所有子图片处理完毕之后,对子图片进行综合处理,得出原始图像的变换结果,判断原始图像中是否存在直线。
设定原始图像中的特征点个数为Ne,且图像变换次数为NT,则可以得到公式:

分析公式(10)可以发现,图像变换次数与子图像个数成反比,子图像越多则图像变换次数越少,子图像所包含的特征点越多,直线判断精度就会越高。考虑到计算精度与计算效率的平衡,本次设计中将子图像设定为32×32,通过这种方式减少计算次数,并缩小峰值表决范围。
2.2 概率霍夫变换
普通的霍夫变换,只能检测图像中存在的线段中是否含有直线,无法检测线段的两个端点,针对这一问题,可以通过概率统计的方式检测图像线段的端点,在确定直线部位之后,将直线部分去除,计算剩下的线段中是否含有直线,其具体流程为:
①计算图像中非零点的个数。
②对获取到的所有非零点进行霍夫变换,并对经过变换得到的参数进行累加,得到霍夫变换最大值。
③比较霍夫变换最大值与设定阈值的大小,如果霍夫变换最大值小于阈值,则判断其不为直线,并将计算目标锚定至下一个点重复上一步骤,如果霍夫变换最大值大于阈值,则判断其为新直线。
④判断直线上线段的端点并计算其长度,如果符合分拣条件就保留该线段,并对该线段上的点进行标记,在后续进行霍夫变换计算时,会自动跳过被标记的点,减少计算量。
概率霍夫变换是对普通霍夫变换的一种升级,能够显著减少参与变换的特征点个数,且可以检测到线段的端点,提升茶叶杂质分拣效率[3]。
2.3 直线检测实验结果
为了验证霍夫变换直线检测的有效性,工作人员在实验室进行茶叶杂质分拣模拟测试(如图6所示)。

图6 茶叶杂质分拣直线检测实验结果
图像(a)为茶叶杂质分拣原始图像,茶叶中掺杂了木棍类杂物,且木棍与茶叶的颜色较为相似。通过霍夫变换计算捕捉到木棍边缘形状。但受限于相机角度以及光照等因素,图像中存在少量阴影,为了提升直线检测的准确率,需要在进行霍夫变换之前对图像进行降噪预处理。图像(b)是在没有处理阴影的情况下直接进行霍夫变换,可以发现出现了明显的误判断。因此,工作人员先对原始图像进行去阴影处理,而后得到二值图像,再将二值图像进行霍夫变换,得到图像(e),可以发现,此时图像中的直线被准确识别了出来。
3 分类器设计
作为模式识别的核心,模式分类一直以来都是图像识别与计算机视觉研究领域的重点研究方向。本次设计中,工作人员选择Support Vector Machine分类法,简称SVM分类法。该方法建立在结构风险最小理论以及统计学习理论基础上,SVM分类法在解决小样本以及高维度模式识别等方面具有一定优势,并且支持监督分类算法,在多个领域中得到了广泛的应用。SVM分类法的原理就是找到最为适宜的分类平面,确保分属于不同类型的数据,与该平面的距离保持最大。将实验数据分为两组,第一组数据的作用是对分类器进行训练,第二组数据的作用是验证分类器的正确性[4]。
本次设计中,需要分拣的物体分为“茶叶”与“杂质”两大类,将茶叶标定为 ω1类,类别标识为+1,将杂质标定为ω2类,类别标识为-1,在此基础上运用SVM分类法,将判断函数设定为f(x),其中变量x为样本数据的向量,则可以得到公式:

如果系统判定函数结果为+1,则目标为茶叶,如果函数判定结果为-1,则目标为杂质。
4 设计茶叶杂质分类系统
为了提高茶叶杂质分拣效率,要根据杂质的不同形状选择不同的分类方式,如果杂质为棍状则使用霍夫变换法进行检测,如果杂质为球状则运用基于SVM分类法的分类器进行检测。
4.1 搭建杂质分拣平台
本次设计中,工作人员以常见的PC机作为系统的硬件,采用2.0GB内存,CPU使用2.10GHzAMD处理器,并搭载视窗操作系统,利用C/C++编程语言,基于VisualC++6.0开发环境设计系统,同时搭载OpenCV视觉函数库,该视觉函数库中的数据可以随意调取,可以依据实际需要编写功能,显著降低程序开发难度,压缩系统开发与调试周期[5]。
4.2 设计系统功能模块
该系统中,负责图像处理的部分包括图像灰度化模块、平滑滤波预处理模块、图像分割模块以及边缘检测模块等。通过图像处理模块将原始图像转化为二值图像,有效去除原始图像中的阴影,并突出图像边缘轮廓。得到二值图像之后就可以开始识别杂质,如果杂质为棍状,利用霍夫交换就可以判断其直线轮廓,将杂质筛除。如果杂质为球状,则要对其特征进行提取,再利用SVM分类法完成对于杂质的分类。
5 结语
如何提升茶叶杂质分拣效率,一直以来都是茶叶制作领域的重点难题,传统的人工分拣方式以及基于颜色阈值的自动化分拣方式,已经无法满足市场需求。因此,设计人员尝试运用图像处理技术以及霍夫变换算法,将计算机视觉进入茶叶杂质分拣工作之中,设计出高效、准确的茶叶杂质分拣系统,为提升茶叶制作效率提供技术基础。
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
中外文摘(2022年8期)2022-05-17
现代临床医学(2022年2期)2022-04-19
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
中老年保健(2021年4期)2021-08-22
现代电子技术(2021年1期)2021-01-17
电子制作(2019年15期)2019-08-27
微型电脑应用(2019年1期)2019-01-23
电子制作(2018年18期)2018-11-14
电脑知识与技术(2018年35期)2018-02-27