
基于双目视觉的智能变电站巡检路径规划方法
2023-01-05 03:44周仲波李金鑫
电气技术与经济 2022年6期
周仲波 简 蓓 田 地 李金鑫 徐 润
(贵州电网有限责任公司遵义供电局)
0 引言
智能巡检路径规划是目前变电站应用较为广泛的一种监测方式,检测的覆盖面积相对较大,且在实际执行的过程中,对于路径的规划效果更佳,精准度更高一些[1]。其实,变电站巡检路径的规划是一项十分复杂且繁琐的工作,主要由运动控制技术、嵌入式综合处理设计、GPS定位导航以及安防处理等组成,具有较强的针对性[2]。可以在日常的工作中,代替人工对智能变电站中关联的设备、特殊场所进行全覆盖式的巡检,一旦出现异常现象,可以及时发出相应的警告信号,通过特殊的信道传输至系统不同的控制位置之上,避免出现大规模的关联故障[3]。
智能变电站巡检路径规划虽然为日常的工作提供了较大的便利条件,但是这种规划模式较容易受到外部因素的影响,更加容易出现规划误差,对日常的巡检工作造成消极影响[4]。为避免上述问题的扩展延伸,对基于双目视觉的智能变电站巡检路径规划方法设计分析。双目视觉技术实际上是机器视觉的另一种重要形式,可以更为精准、快速地定位到变电站内部的规划偏差,及时做出响应,形成更加灵活、多变的巡检路径规划结构,以此来进一步缩短路径规划之间存在的差异,加强对深度信息、立体信息的汇总整合,为后续路径规划技术的创新提供参考依据[5]。
1 智能变电站双目视觉巡检路径规划方法
1.1 巡检地图数据初始化预处理
在对智能变电站双目视觉巡检路径规划方法进行设计之前,需要先对基础的规划环境进行预处理,并将巡检地图数据初始化。首先,采用Dijkstra算法先测定出变电站标定的巡检范围,构建巡检规划的最短路径。这部分需要注意的是,日常的巡检规划最短路径需要与实际的覆盖面积呈1∶13的比例,但是考虑到交通路网、通信路由以及管道等因素的影响,为确保最终测试结果的精准可靠,缩小比例为1∶11即可[6]。在巡检地图之中设定基础关联节点,将节点之间的距离缩短至最小,结合巡检的地图,将路径规划划分为两个阶段,采用栅格法划分为50×100、200×200两种,具体如图1所示。
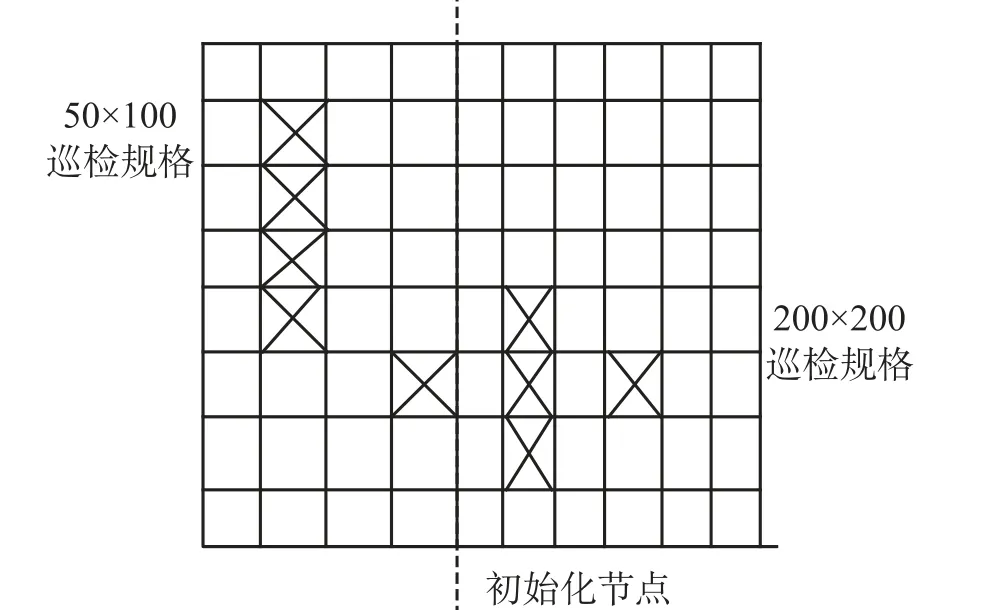
图1 巡检地图数据初始化栅格结构图示
根据图1,可以完成对巡检地图数据初始化栅格结构的设计。在栅格盘之上,标记出核心的巡检行走点,将栅格地图描述为基础的规划矩阵,将实际的自动规划程序相关指标调整为0,在保留栅格规划路径的前提下,完成巡检地图数据初始化预处理[7]。
1.2 视觉交互规划节点布设
在完成对巡检地图数据初始化预处理之后,接下来,根据实际的规划需求及标准,进行视觉交互规划节点的布设。通常情况下,不同的变电站巡检模式也不同,存在一定的差异[8]。可以先确定人工规划地图的规模,使用JPS技术构建寻路程序,此时,针对巡检的范围,开放规划识别程序,并在区域之内,设定一定数量的交互规划节点。
最大程度确保变电站巡检工作的维护质量,这部分需要注意的是,交互规划节点的设定可以结合双目视觉技术,以最短的路径作为核心规划轴线,对异常位置进行双向侧位标记,控制系统中需要安装JPS寻路指令,具体布设情况如图2所示。
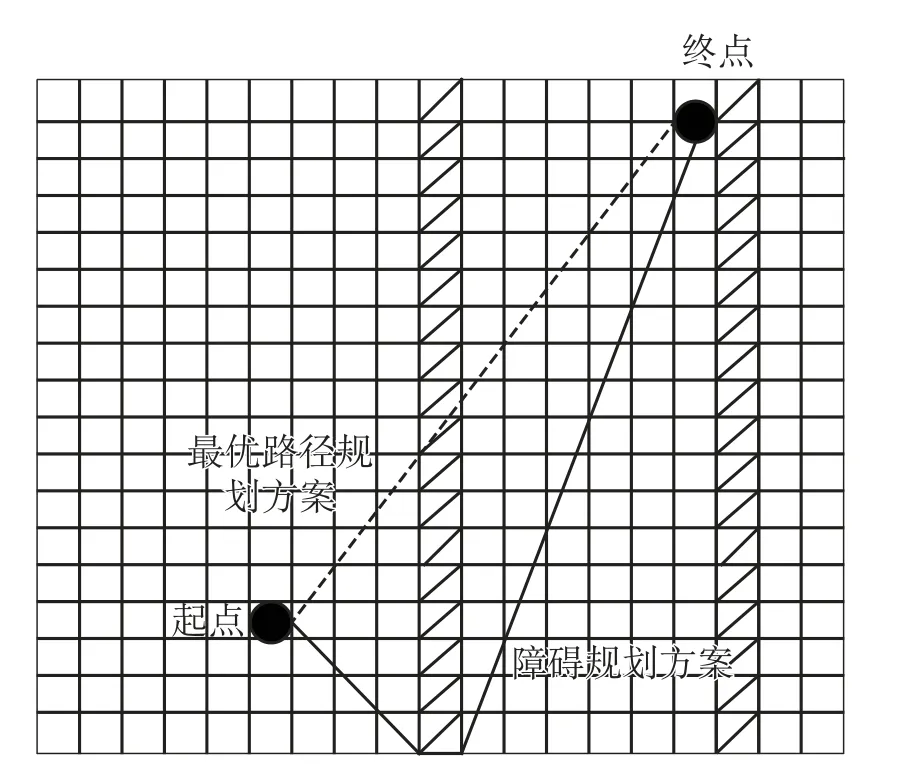
图2 JPS寻路视觉交互规划节点设定图示
根据图2,可以完成对JPS寻路视觉交互规划节点的设定。利用双目视觉技术,在标定的巡检范围之内,构建JPS交互识别空间,针对智能变电站中某一个特定的节点,获取采集对应的障碍跳点,并计算出交互规划节点之间的最短距离,具体如式(1)所示:

式中,G表示节点之间最短距离;δ表示跳点数量;d1表示定义异常差值;d2表示预设差值;s表示单元覆盖范围;e表示交互规划次数。通过上述计算,最终可以得出节点之间的最短距离,结合得出的数值,划定各个视觉交互规划节点的间距,同时,采用双目视觉技术,不断调整智能变电站中的巡检跳点位置,完成对视觉交互规划节点的布设。
1.3 构建三维双目视觉巡检路径规划模型
在完成对视觉交互规划节点的布设之后,需要结合实际的巡检需求及标准,构建多维双目视觉巡检路径规划模型。采用双目视觉技术,将变电站的智能巡检路径规划程序与对应的控制系统进行双向关联。接下来,在标定的范围之内,构建动态化的约束条件及限制标准,在双目视觉的辅助之下,对基础的路径规划指标参数做出调整,具体如表1所示。

表1 双目视觉巡检路径规划指标参数表
根据表1,可以完成对双目视觉巡检路径规划指标参数的调整和处理。随后,利用专业设备,获取智能变电站中的巡检路径规划需求,以彩色图像对外输出,在无特殊的情况之下,进一步提升智能变电站巡检设备及机器人的实际避障能力,通过对所规划最优路径轮廓,长、高、宽等指标的调整,改变规划的范围,结合双目视觉技术,构建多维巡检路径规划流程,具体如图3所示。
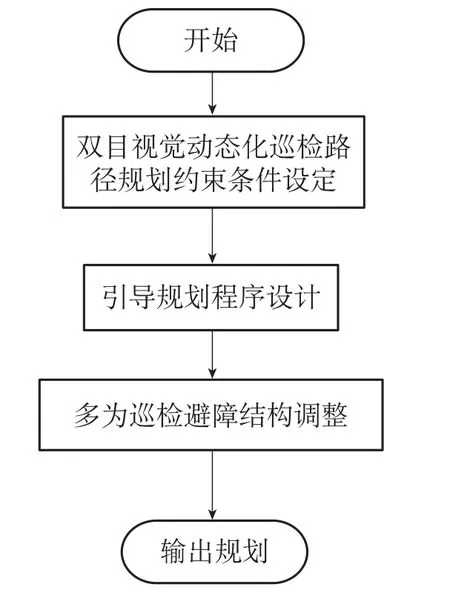
图3 多维巡检路径规划模型流程设计
根据图3,可以完成对多维巡检路径规划流程的设计。与此同时,将上述设定的巡检节点与模型相关联,并在模型中设定三维双目视觉避障程序,形成多目标的避障指令集群,完成对三维双目视觉巡检路径规划模型的构建。
1.4 Hopfield避障视觉调控完成路径规划
在完成对三维双目视觉巡检路径规划模型的构建之后,结合Hopfield避障视觉调控法,完成对智能变电站巡检路径的规划设定。首先,结合Hopfield避障技术与双目视觉技术,对变电站中的巡检路径标志性的拐点做出标记,利用布设的节点进行监测。随后,通过调整设备的定向识别帧数,延伸对应的巡检规划范围,获取区域性的避障视觉调控结果。
结合所构建的三维巡检路径规划模型,设计应变Hopfield矩阵,利用矩阵来限制存在的巡检误差,并以视觉移动目标作为引导,利用智能控制程序,最终可以完成对变电站巡检路径的侧向多维规划,营造更加稳定、安全的规避环境,进一步提升路径规划工作的质量和效率。
2 方法测试
本次主要是对双目视觉的智能变电站巡检路径规划方法的实际应用效果进行分析与研究,考虑到测试结果的真实可靠,需要以对比的形式展开分析,设定传统改进蚁群巡检路径规划测试组、传统无人机自主巡检路径规划测试组以及本文所设计的双目视觉巡检路径规划测试组,测试得出的结果比照验证。接下来,需要搭建相应的测试环境。
2.1 测试准备
在对双目视觉的智能变电站巡检路径规划方法的实际应用效果进行分析与研究之前,需要搭建相应的测试环境。选择G智能变电站作为测试的主要目标对象。首先,结合双目视觉技术在变电站的巡检系统之中指定对应数量的执行路径作为基础路径,结合Matlab技术,调整数值、信息的传输信道。
完成基础环境的布设。随后,以D智能变电站作为巡检的核心点,将所有巡视点存在的坐标值进行归一化处理,将变电站的巡检区域划分为4个,并对相关指标参数做出调整、优化,具体如表2所示。
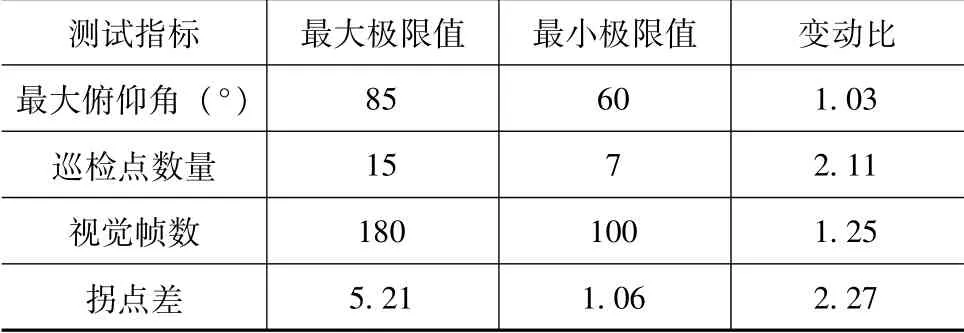
表2 智能变电站基础测试指标参数设定表
根据表2,可以完成对G智能变电站基础测试指标参数的设定,确保控制系统与变电站的执行指标同步,完成对测试环境的搭建。
2.2 测试过程及结果分析
根据上述搭建的测试环境,结合双目视觉技术,进行具体的路径规划设计。假设视觉识别的帧率为100帧,根据最大偏向角巡检效率的变动状态,获取路径规划的相关彩色图像,随着帧数的变化,路径的输出深度也会明显提升,此时可以根据所设定的巡检标记点,测定出存在的路径权重,规划视觉拓扑路径,具体如图4所示。
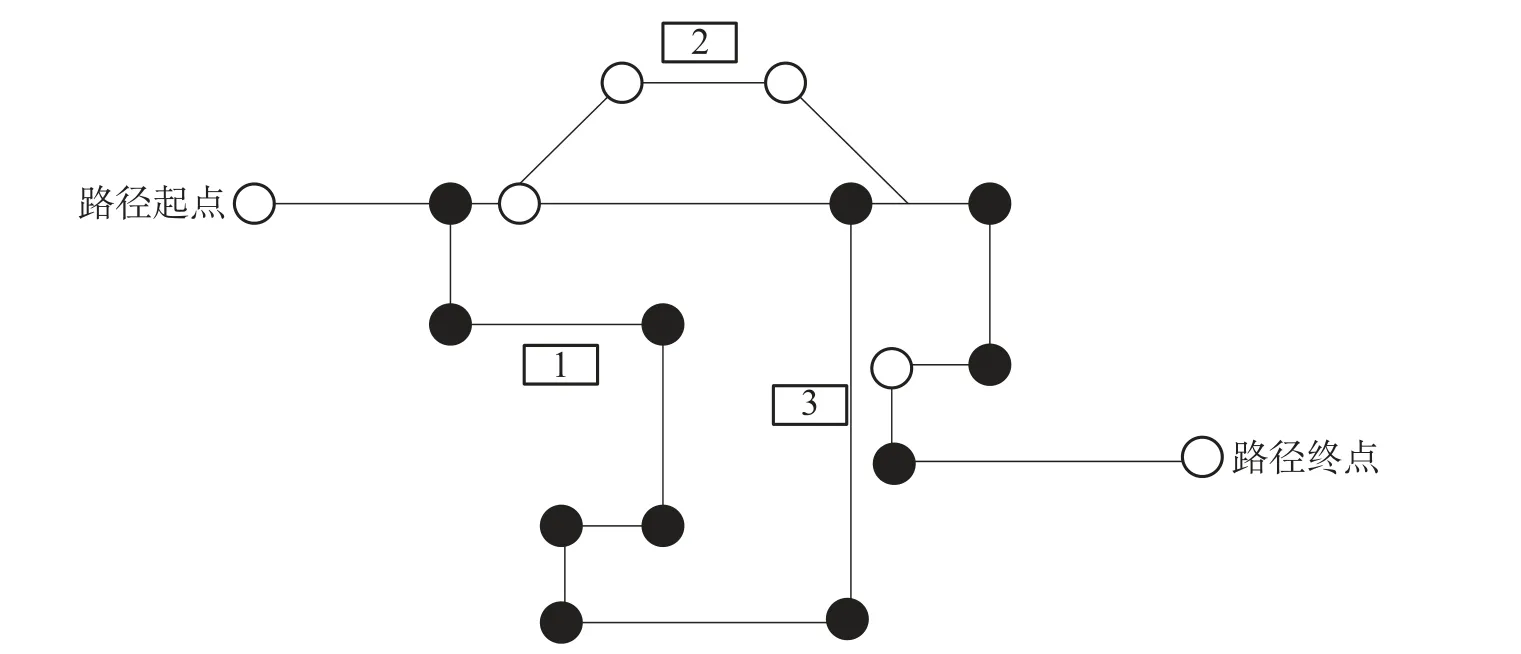
图4 智能变电站巡检路径规划图示
根据图4,可以完成对G智能变电站巡检路径的规划,随后,在4个标定的区域之内,依据上述的巡检规划路径,测定出具体的巡检路径规划时间,并对测试结果比照分析,如表3所示。
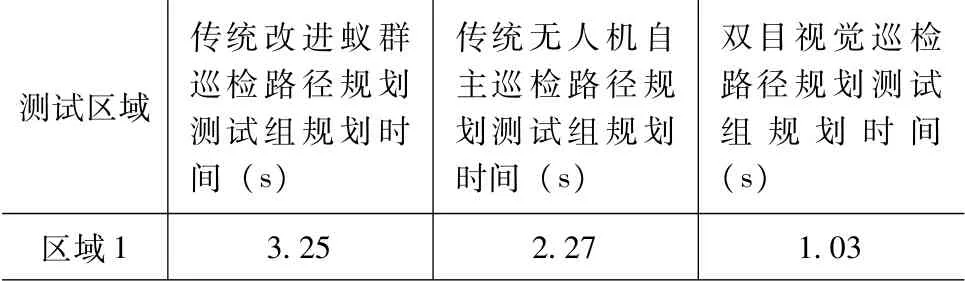
表3 测试结果对比分析表

(续)
根据表3,可以完成对测试结果的分析:对比传统改进蚁群巡检路径规划测试组、传统无人机自主巡检路径规划测试组,本文所设计的双目视觉巡检路径规划测试组最终得出的巡检路径规划时间均为1.3s以内,表明其应用规划的效果更佳,规划的误差较小,具有实际的应用价值。
3 结束语
综上所述,便是对基于双目视觉的智能变电站巡检路径规划方法的设计和分析。对比传统的巡检路径规划方法,本次结合双目视觉技术,进一步扩展实际的规划范围,以视觉定位作为引导,逐步构建更加灵活、多变的规划结构。除此之外,双目视觉辅助环境下,对于路径规划的误差也可以得到更好的控制,大幅度提高智能变电站的巡检效率,实现多目标、多层级路径规划任务的同步执行,完成最优处理,对于智能变电站巡检工作程序的应用能力也是一种提升,具有更强的应用价值及创新意义。
猜你喜欢
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
科技创新与应用(2021年31期)2021-11-09
中北大学学报(自然科学版)(2020年4期)2020-07-13
电子制作(2019年20期)2019-12-04
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
现代计算机(2016年11期)2016-02-28
弹箭与制导学报(2015年1期)2015-03-11
