
数字化变电站巡视机器人避障路径智能规划研究
2023-01-05 03:43赵泽龙易克松朱清耀周仲波
电气技术与经济 2022年6期
赵泽龙 郑 磊 易克松 朱清耀 周仲波
(贵州电网有限责任公司遵义供电局)
0 引言
现如今,变电站的智能自动化水平得到了极大的提升,而巡视自主移动机器人的应用也越来越广泛,为数字化变电站日常的工作提供了极大的便利[1]。所谓巡视机器人是电力特种机器人系列中的一种,主要用于代替人工完成变电站巡检工作,而路径规划则是保证巡视机器人工作质量与效率的关键[2]。传统的巡视机器人通常是以单向避障或者定位避障的模式实现最优路径的规划,这种形式虽然可以完成预期的规划目标,但是较容易受到外部因素的影响,导致规划质量不高。在实际中,对于避障环境的要求和规划限制也是极严格的,因此研究一种新的数字化变电站巡视机器人避障路径智能规划方法具有重要意义[3]。
为了提升数字化变电站巡视机器人避障路径智能规划质量,通过划定数字化变电站巡检覆盖范围,对机器人避障程序进行相应调整,并根据实际环境情况及路径选择合理的规划方案,保证数字化变电站的安全平稳运行[4]。因此需要结合三维技术、高精度GPS技术,进一步构建更加灵活、多变的巡视规划机器人内置结构,扩大对应的覆盖区域,推动相关行业及技术迈入一个新的发展台阶[5]。所以研究一种新的数字化变电站巡视机器人避障路径智能规划方法势在必行。
1 变电站巡视机器人避障路径规划方法设计
1.1 明确人工避障势场区域
在对变电站巡视机器人避障路径规划方法设计之前,需要根据变电站巡视机器人实际的工作区域,明确人工避障势场区域[6]。所谓人工避障势场主要指的是结合三维技术所构建的一个虚拟的空间,是根据实际变电站的空间按照比例缩小而成的。将巡视机器人实际的运动程序作为构建势场的限制条件,在标定的空间中搭建引力和斥力的场强线,致使巡视机器人依据“磁场”的变化不断运动,完成预期的避障路径智能规划[7]。首先,需要在模糊区域之中布设一定数量的监测节点,测定机器人在行进的过程中所受的合力大小,计算出区域范围之内的斥力和引力,具体如式(1)所示:

式中,G表示避障范围内的斥力;I表示覆盖范围;φ表示磁场可控直径;m表示磁场重合距离;i表示避障次数;κ表示单向运动范围。通过上述计算,最终可以得出避障范围内的斥力。随后,结合得出的数值及磁场的变化情况计算出磁场的引力,具体如式(2)所示:

式中,o表示磁场的引力;β1表示障碍物识别预设时间;β2表示障碍物实际识别时间;χ表示目标点距离;ϑ表示斥力场函数。通过上述计算,最终可以得出实际的磁场的引力。利用得出的引力和斥力,标记机器人的识别盲区,在对应位置安装检测装置,形成全覆盖式的人工避障势场,根据总势场的变动状态决定机器人的运动方向,建立动态化的路径规划梯度,完成对人工避障势场区域的明确,为后续路径规划提供重要的参考依据[8]。
1.2 巡检障碍距离及方位计算
在明确人工避障势场区域之后,接下来需要根据实际的避障需求及路径规划方法,进行巡检障碍距离及方位的计算。通常情况下,与工业巡检机器人不同的是,数字化变电站巡检机器人的工作范围是有限的,一般会在机器人的前方、后方、左侧和右侧各个位置安装异常识别器和多维传感装置,利用相应的测试程序分析核算所识别障碍物与巡检机器人之间的距离,具体结构如图1所示。
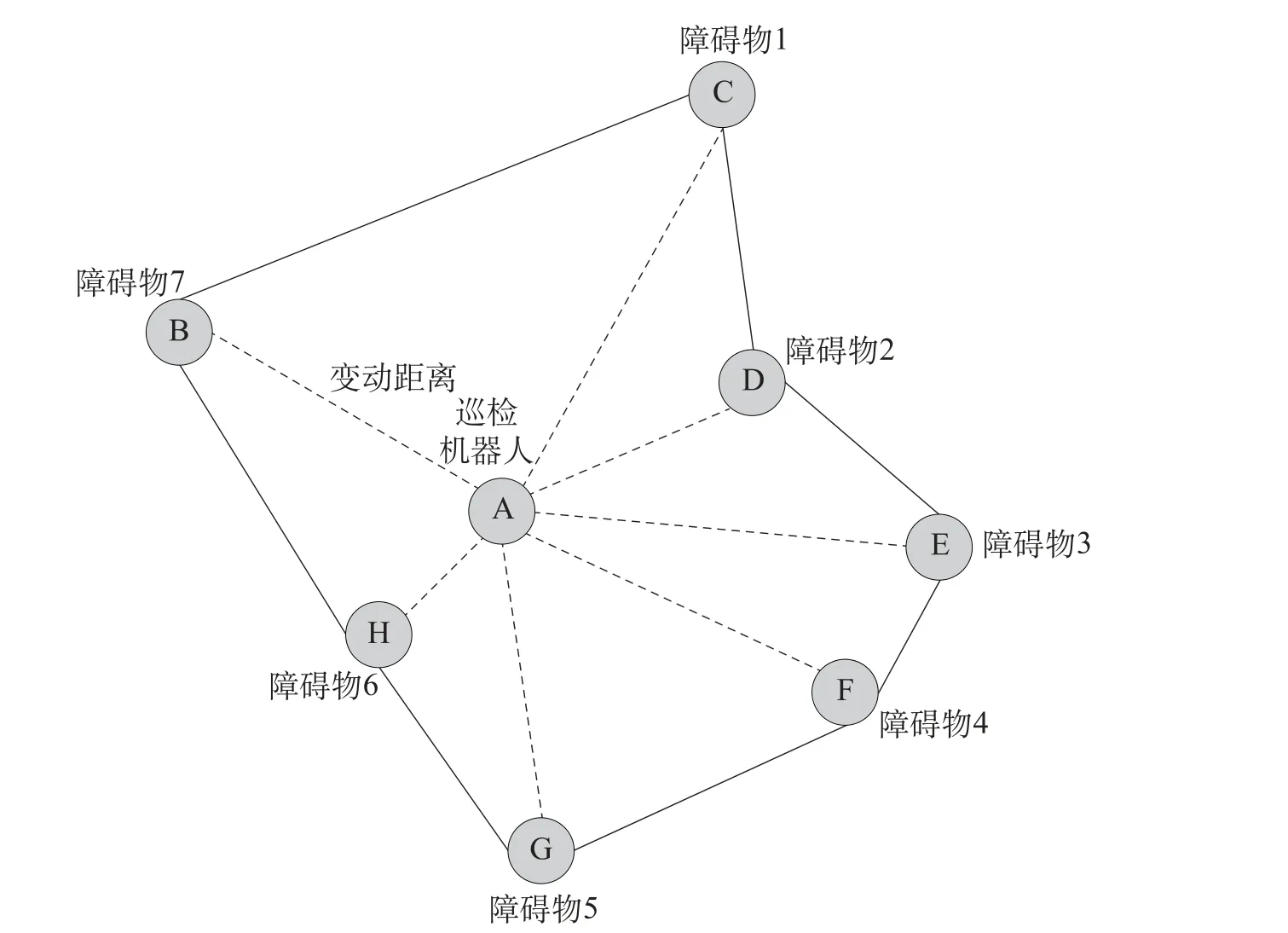
图1 巡检障碍距离测定结构图示
根据图1,可以完成巡检障碍距离测定结构的设定与调整,随后结合机器人的运行状态,计算出实际的巡检障碍距离,具体如式(3)所示:

式中,J表示巡检障碍距离;θ1表示探测范围;θ2表示重合范围;π表示空间矢量;א表示探测直径。通过上述计算,最终可以计算得出实际的巡检障碍距离。依据实际的巡检障碍距离数值,判定此时巡检机器人与障碍物之间的距离,结合周围环境及磁场的变化,将机器人在变电站内部的识别角度从0°调整到360°,在此过程中逐步测定路径智能规划的空间方向矢量,具体如表1所示。

表1 机器人避障路径智能规划空间方向矢量表
根据表1,可以完成对机器人避障路径智能规划空间方向矢量的测定和分析。根据空间矢量的变动,结合机器人采集障碍物的运动方位信息,并通过设定模糊路径,完成对巡检障碍距离及方位的计算。
1.3 Dijkstra多目标避障路径智能规划模型设计
在完成对巡检障碍距离及方位的计算之后,接下来根据变电站机器人的巡检工作项目,结合Dijkstra多目标避障技术构建路径智能规划模型。通常情况下,巡检机器人的运行是通过预设目标来催动的,虽然能够完成预期的任务,但是不够灵活。
在控制系统中融入Dijkstra多目标避障程序,从多个方向设计避障路径。这部分需要注意的是,可以在机器人上搭载二维激光雷达,结合URDF调度模型,构建多范围、动态化的模型的规划流程,具体如图2所示。
根据图2,可以完成对Dijkstra多目标避障路径智能模型流程的设计与调整,将上述计算出的数值应用在路径智能规划模型之中,优化模型对于障碍物的规避能力,实现Dijkstra多目标避障路径智能规划。

图2 Dijkstra多目标避障路径智能模型规划流程
1.4 动态窗口法实现路径规划
在完成对Dijkstra多目标避障路径智能规划模型的设计之后,接下来采用动态窗口法,实现机器人避障路径的智能规划。在机器人的识别程序之中设定关联窗口,并构建动态化的标记空间。根据机器人的运行区域,对异常位置逐一做出标定。
同时,通过动态窗口将相关的数据信息传输至控制系统程序之中,便于管理人员及时查看维护。但是这部分需要注意的是,动态窗口法对于机器人的路径的规划并不受到限制,所以覆盖的范围也会更大一些,更加有利于路径的智能规划处理,以此完成数字化变电站巡视机器人避障路径智能规划。
2 方法测试
为了验证本文所设计的数字化变电站巡视机器人避障路径智能规划方法的有效性,进行实验测试。选择H数字化变电站作为测试的主要目标对象,为了保证实验结果具有可比性,设定传统插补轨迹路径规划测试组、传统融合视觉路径规划测试组以及本文所设计的Dijkstra多目标避障路径规划测试组,测试得出的结果比照分析,得到相关的实验结果。
2.1 测试准备
在对数字化变电站巡视机器人避障路径智能规划进究前,需要搭建相应的测试环境。将巡检机器人与变电站的控制平台相关联,选择bobac搭载上下两层控制程序,并将全向轮设备作为基础搭接。将预设好的巡检工作任务以指令或者协议的形式设定在机器人的执行程序之中,根据相关的巡检任务设置机器人的定向巡检动作,具体如图3所示。
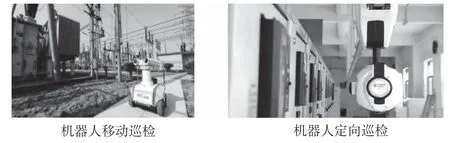
图3 机器人工作状态图示
根据图3,可以完成对机器人工作状态的调整的分析,随后在机器人内部结构中预装ROS控制系统,关联上位机与下位机,实现多层级、多目标控制。与此同时,将传感器与bobac工控器搭接,实现路径规划环境的构建。核定测试设备及装置是否处于稳定的运行状态,并确保不存在影响测试结果的外部因素,核定无误后,开始测定。
2.2 测试过程及结果分析
根据上述搭建的测试环境,进行相关避障实验测试。将所构建的避障任务分别设定在机器人之中,结合避障目标点的设定,测算出路径规避指标值,具体如表2所示。

表2 路径规避指标值设定表
根据表2,可以完成对路径规避指标值的设定。随后,根据调整的范围,得到机器人进行避障路径的智能规划结果,结果如图4所示。
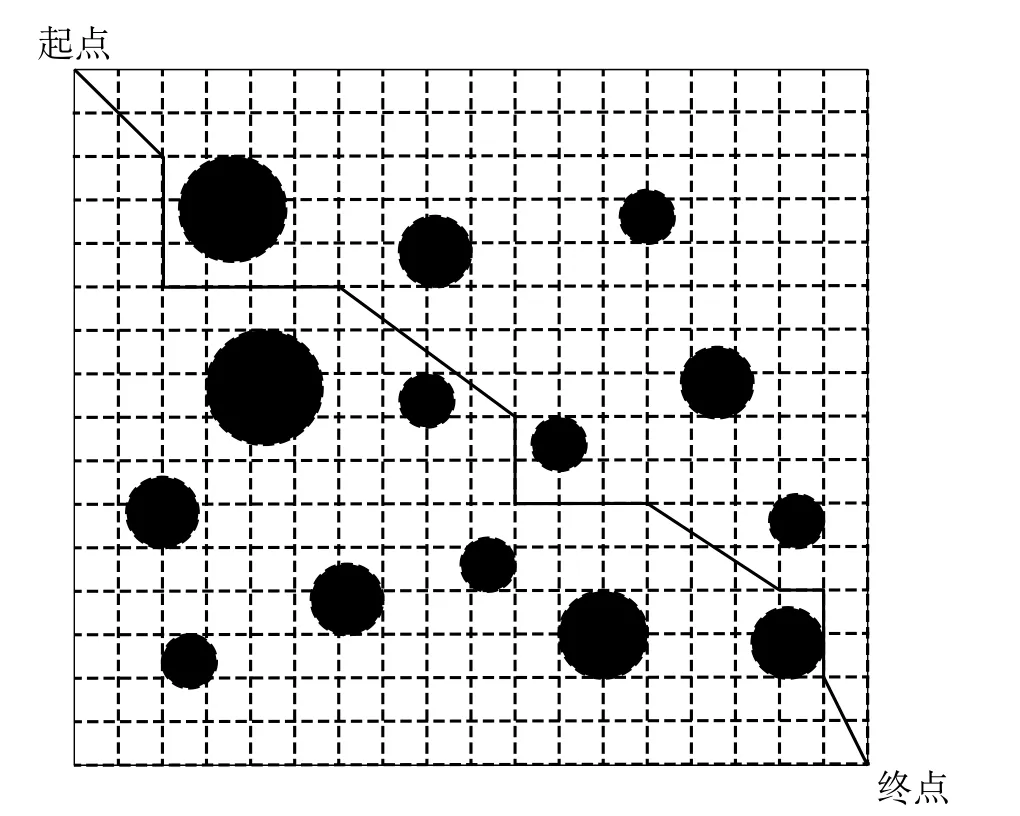
图4 巡检机器人避障路径智能规划图示
根据图4,可以完成对巡检机器人避障路径智能规划的设计与测定,在不同的测试避障目标下,测试变电站巡视机器人避障路径智能规划的耗时,对得出的测试结果对比分析,具体如表3所示。
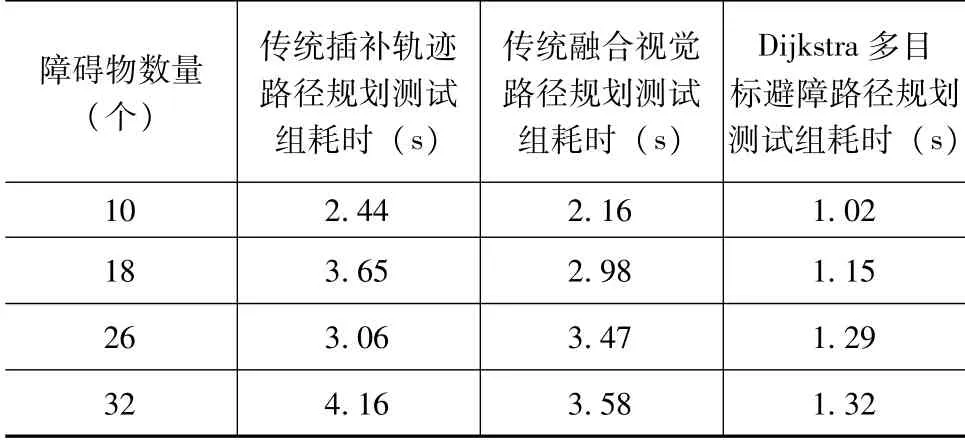
表3 测试结果对比分析表
分析表3可知,对比于传统插补轨迹路径规划测试组、传统融合视觉路径规划测试组,本文所设计的Dijkstra多目标避障路径规划测试组最终得出的路径智能规划耗时均控制在了较低的水平,基本保持在1.4s以下,说明本文方法应用后,机器人对于障碍物的识别速度较快,路径规划的可靠率较高,实际应用效果较好。
3 结束语
为了保证机器人巡检质量与效率,本文设计一种新的数字化变电站巡视机器人避障路径智能规划方法。与传统的机器人避障路径模式相对比,本次设定的路径规划方法更加灵活、稳定,且具有较强的针对性。在数字化变电站日常的工作中,动态障碍物环境、不符合实际需求等因素常常出现,这也导致巡视工作受到消极影响。使用本文方法后,巡视机器人会在标定的范围之内,对动态或者非动态的障碍物进行规避,从多个角度考虑,设定更短且安全性更高的全局规划路径轨迹,过程中如果环境发生改变,还可以融合运动障碍物轨迹做出二次分析,使用动态窗口法对路径方案做出合理调整,进一步增加机器人对周围环境的适应度,进一步满足避障需求,提升巡检机器人工作质量与效率。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
北京汽车(2019年4期)2019-09-17
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
