单向轴承电机驱动的可逆式引信隔爆机构
2023-01-04 13:29范宏辉彭志凌鲁旭涛
探测与控制学报 2022年6期
范宏辉,彭志凌,鲁旭涛,谢 非,班 伟
(1.中北大学机电工程学院,山西 太原 030051;2.中国船舶重工集团公司第七一〇研究所,湖北 宜昌 443003)
0 引言
引信安全系统是引信中不可或缺的子系统,它的作用是确保弹药安全储藏以及弹药发射过程中能精准、可靠地控制弹药引爆,是对隔爆机构由安全状态向待发状态转换的运动控制[1]。隔爆机构是控制爆炸序列对正与否的结构,爆炸序列的作用是把引信接收到目标的起始信号或能量转换成爆轰波并有效逐级地放大,进而起爆战斗部主装药。国内外弹药引信的隔爆机构动作多为单方向、一次性的,完成解除保险和隔爆过程后不可恢复为安全状态[2],不仅为引信检测过程中对隔爆机构动作可靠性进行检测带来困难,还为攻击出现异常或处理哑弹等行动带来安全隐患,因此,设计一种运动可逆式引信隔爆机构尤为重要。
文献[3]提出了一种运动可逆式引信安全系统,利用步进电机实现了引信隔爆机构的逆向运动,能够使引信在待发状态与安全状态之间转换,但是其引信安全系统结构复杂、功耗大。文献[4]提出了一种基于滑块继续运动的安全状态可恢复隔爆机构,利用滑块继续运动可将引信由待发状态改变为安全状态,但是其运动不可逆,引信第二次进入安全状态后无法再次恢复为待发状态。文献[5]提出了基于转子继续转动的安全状态可恢复隔爆机构,但是结构复杂,应用范围有限。文献[6]提出了逆压电驱动的可逆式引信隔爆机构,借助逆压电效应使定子在交变信号下蠕动,从而控制爆炸序列对正与否,但是隔爆步骤单一,应用场合受限。为提升引信检测过程中对隔爆机构动作可靠性的测试性,本文提出一种基于单向轴承的电机驱动可逆式引信隔爆机构。
1 单向轴承与步进电机的特点及应用
1.1 单向轴承
1.1.1单向轴承的特点
单向轴承是在一个方向上可以自由转动,而在另一个方向上锁死的一种轴承。单向轴承的金属外壳里,包含很多个滚轴、滚针或者滚珠,其滚动座(穴)的形状使它只能向一个方向滚动,而在另一个方向上会产生很大的阻力。
图1所示为楔块式单向轴承,轴承外圈逆时针转动时,楔块压缩弹簧运动一段距离,轴承内圈在楔块上滑过内圈不会转动。轴承外圈顺时针转动时,楔块被保持架限制不会产生运动,楔块将内圈卡死带动内圈一起转动。
图1 楔块式单向轴承Fig.1 Wedge type unidirectional bearing
单向轴承为标准零件,工艺成熟、运用广泛,具有良好的机械性能。本文提出的一种基于单向轴承的电机驱动可逆式引信隔爆机构,就是依靠单向轴承的运动特性进行设计的。
1.1.2单向轴承的应用
根据单向轴承的工作原理,设计一种可以单向传动的锥形齿轮,此单向传动锥形齿轮是本次隔爆机构内的重要传动部件。通过步进电机正、反两个方向的旋转,可分别驱动一个单向传动齿轮,将一部步进电机同时作为隔爆机构直线运动与旋转运动的动力源,且两个运动独立进行。
图2所示,将单向轴承与锥形齿轮配合安装在一起,就组成了本次隔爆机构所需的单向传动齿轮。锥形齿轮按图中箭头所示方向旋转时,因为楔形块的作用,会带动轴承内圈一起转动,可将齿轮的动力传到与轴承内圈配合的轴上。锥形齿轮旋转方向与箭头所示方向相反时,轴承内圈不会转动,此时锥形齿轮空转而不会将动力传到与轴承配合的轴上。
图2 锥形单向传动齿轮Fig.2 Conical unidirectional transmission gear
1.2 步进电机
1.2.1步进电机的特点
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比[7]。
步进电机相对于其他控制用途电机的最大区别是,它接收数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,其本身就是一个完成数字模式转化的执行元件;而且它可开环位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的增量位置控制系统与传统的直流控制系统相比,其成本明显减低,几乎不必进行系统调整。步进电机的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步。因而只要控制脉冲的数量、频率和电机绕组的相序,即可获得所需的转角、速度和方向[8]。
采用芯片作为总控时,步进电机较之普通电机运动角度更加精确,且更易编程操控。为确保弹药安全,隔爆机构的运动必须精确可靠,故本设计采用步进电机作为驱动电机。
1.2.2步进电机的应用
图3所示为步进电机双向驱动结构。步进电机左旋时,带动单向齿轮转动。单向齿轮1的转动方向与工作方向相同,带动传动轴一起转动;单向齿轮2的转动方向与工作方向相反,其传动轴不会转动。步进电机右旋时,运动状态与上述相反。利用此结构,可实现步进电机分别驱动导爆筒的上下运动与旋转运动,且两个运动相互独立。此结构令本文所提出的运动可逆隔爆机构拥有两个解保运动。两种运动由一部步进电机驱动,节省了能源消耗,使得机构更加简洁。

图3 步进电机双驱结构Fig.3 Stepper motor dual drive structure
图4所示为隔爆机构中直线运动机构。步进电机左旋时,单向齿轮1驱动圆柱齿轮1运动,通过齿轮啮合驱动圆柱齿轮2运动,带动凸轮作圆周运动。导爆药筒通过滚珠与凸轮接触,凸轮短边在正下方时,由弹簧将导爆药筒所在部件弹起。凸轮长边向下转动时,凸轮通过滚珠压缩弹簧,带动导爆药筒向下作直线运动。
凸轮转动360°,则导爆药筒完成一次直线往复运动;凸轮转动180°停止时,导爆药筒则处于竖直高度对正状态。此机构可将步进电机的左旋运动,转化为导爆药筒的直线往复运动。
图4 直线运动机构Fig.4 Linear motion mechanism
图5所示为隔爆机构中旋转运动机构。步进电机右旋时,单向齿轮2驱动锥形齿轮1运动,通过齿轮啮合驱动锥形齿轮2运动,带动圆柱齿轮3运动,通过齿轮啮合驱动导爆药筒作旋转运动。
图5 旋转运动机构Fig.5 Rotating motion mechanism
齿轮传动比为1∶1,步进电机右旋90°则导爆药筒旋转90°,由此可完成导爆药筒角度的对正与错位。此机构可将步进电机右向旋转,转换为导爆药筒的旋转运动。
2 可逆式引信隔爆机构
引信内空间有限,为节省空间,本文提出的可逆引信隔爆机构采取对称布置。隔爆机构布局如图6所示。左侧为直线运动机构,右侧为旋转运动机构。总体布局为自上而下,对引信内部纵向空间提出一定的要求,也可根据实际情况调整空间布局。
图6所示为隔爆机构初始状态,此时导爆药筒因弹簧作用被提升一定高度,导爆药筒口与火药口成90°。建立步进电机与引信总控的通信,当引信总控发布第一道解保命令时,步进电机接收信息开始进行隔爆机构对齐动作。第一步将解保动作设置成直线位置对齐,当步进电机完成第一步动作后继续等待第二步指令。
图7所示为一级解保状态,步进电机收到指令后开始转动设定的角度,凸轮在齿轮的带动下压缩弹簧,导爆药筒向下运动。此时导爆药筒与火药到达同一高度,因为导爆药筒口与火药口90°错开,因此爆炸序列仍未对正。
第二步解保信息到达后,步进电机驱动旋转机构运动,此时导爆药筒旋转90°,导爆药筒口与火药口对正,完成爆炸序列的对正。如图8所示,此时爆炸序列已经对正,引信处于待发状态。若要隔爆机构再次恢复到隔爆状态,只需给步进电机发送恢复指令,步进电机继续运转即可。由此可完成隔爆机构在安全状态与待发状态之间的转换。
图6 防爆机构初始状态Fig.6 Initial state of interrupter mechanism

图7 防爆机构一级解保状态Fig.7 Initial release status of interrupter mechanism
图8 防爆机构待发状态Fig.8 Ready state of interrupter mechanism
3 仿真验证
3.1 理论计算
计算电机功率以及齿轮和轴的数据,定量分析所提出隔爆机构的性能。
将与导爆药筒连接的杆及杆上的齿轮、滚珠等看做一个整体,称之为执行机构,将执行机构等效为一个直径等于杆上圆柱齿轮直径的实体圆柱。选定机构材料为45#钢(调质),密度、直径、高度分别为ρ=7.85 g/cm3,d=15 mm,h=60 mm。
计算其重量:
m=ρv=85 g,
(1)
G执=mg=0.85 N。
(2)
凸轮短边在下时,执行机构依靠弹簧的弹力保持为提升状态,弹簧受力为0.85 N,弹簧被压缩长度为x1。当凸轮开始转动时,压缩弹簧使执行机构向下运动一段距离,导爆药筒与火药在竖直位置上对齐,压缩长度为x2=2x1。此时凸轮施加给弹簧的力为
f=kx2=1.7 N,
(3)
式(3)中,f为弹簧受力,k为弹簧劲度系数。
导爆药筒在竖直方向的行程为10 mm,凸轮所做的功为
w=fx2=17×10-3J。
(4)
隔爆机构由安全状态转换为待发状态要求用时为10 s,机构传动比为1∶1,凸轮完成一次动作需旋转180°,即直线运动时电机需旋转180°,而旋转运动时电机只需旋转90°。故而时间分配为直线运动时长6 s,旋转运动时长3 s,两次运动之间等待指令信息1 s,电机转速应为5 r/min。
凸轮压缩弹簧功率为
P执=w/t=2.9×10-6kW。
(5)
因旋转运动过程中,导爆筒所在杆受到扭矩很小,仅克服摩擦力做功,其值远小于直线运动所需功率,因此执行机构正常运转的功率应不小于2.9×10-6kW。
所用圆柱齿轮为8级精度,效率为0.97;锥形齿轮为8级精度,效率为0.94;轴承选用滚子轴承,效率为0.98。
电机所需功率为
(6)
步进电机的功率与其转速相关,通常步进电机以转矩作为标识,将步进电机的功率转换成转矩:
(7)
所需步进电机转矩很小,相应的步进电机的能耗更少。在步进电机选型时,只需确保步进电机转矩不小于6.88 N·cm即可,参照现有步进电机型号,可供选择的种类很多,可选择所需尺寸。
根据功率,计算转轴的最小直径。在传动系统中,与步进电机相连接的轴上功率最大,其扭矩也最大。
计算与步进电机相连接轴的转矩为
(8)
计算轴的最小直径为
(9)
式(9)中,A0为由轴的材料和承载情况确定的常数[9]。
与电机相连接的轴的直径不应小于0.99 mm,其余轴的功率皆小于此轴,故可按此轴计算直径进行选轴。此传动系统功率较小,在轴与齿轮进行配合时采用过盈配合,不采用键槽配合,以降低轴的直径减小隔爆机构的尺寸。
直接通过轴与电机进行传动的齿轮所受的扭矩是最大的,计算此齿轮的直径、齿数以及模数,其余齿轮可按照此参数进行选择。
齿轮分度圆直径为
(10)
式(10)中,k为载荷系数,u为齿数比,Φd为齿宽系数,σ为材料强度极限。
齿轮的模数为
(11)
m=(0.007~0.02)a,
(12)
式中,取m=0.5。
确定齿轮齿数为
(13)
式(13)中,取Z=10。
确定齿轮直径为10×0.5=5 mm。
对以上隔爆机构零件进行了尺寸计算,以及隔爆机构的功率计算。此隔爆机构消耗功率较小,传动能量损失少;零件选型面广、易于制造,根据不同场合可选择不同尺寸类型的零件进行组装。
3.2 运动学仿真
在理论计算的基础上,利用SolidWorks软件对隔爆机构进行三维建模,做运动学仿真,观察机构运动的特性。图9所示为隔爆机构的三维模型。
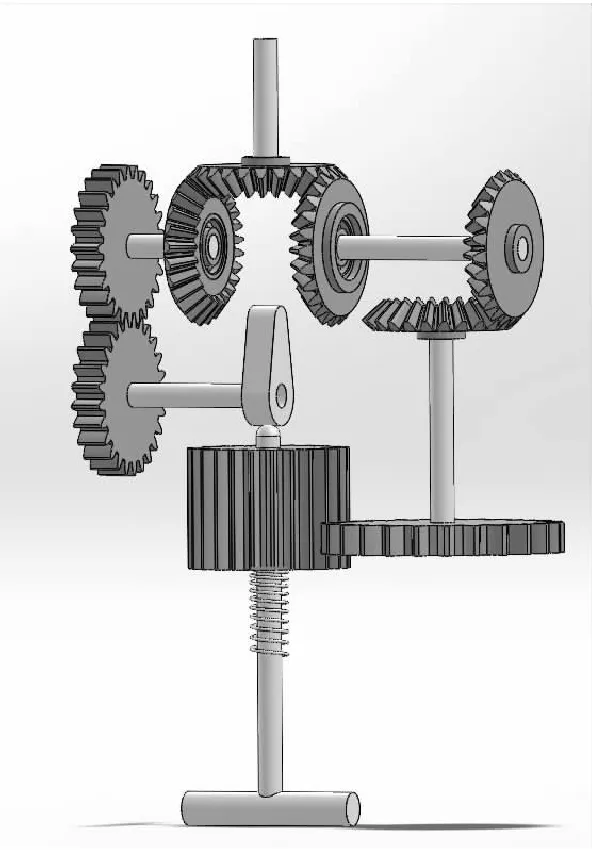
图9 隔爆机构三维模型Fig.9 3D model of interrupter mechanism
添加旋转马达,给定马达转速为5 r/min,分析执行杆件机构的线性位移。
杆件机构单次运动时长为6 s,图10所示为24 s内杆件在竖直方向的线性位移与时间的关系图。由图10可知,杆件随凸轮的转动而作周期为12 s的上下往复运动,运动状态符合本文设计。
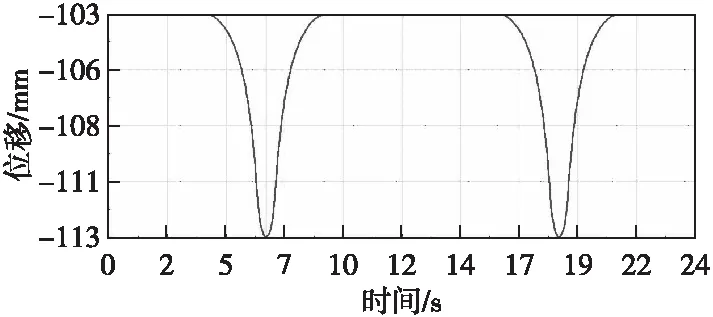
图10 线性位移Fig.10 Linear displacement
图11所示为执行杆件在竖直方向的线性速度随时间的变化,杆件在竖直方向的线性速度与凸轮的形状有关,可根据具体要求设计不同的凸轮,以得到符合要求的线性速度。
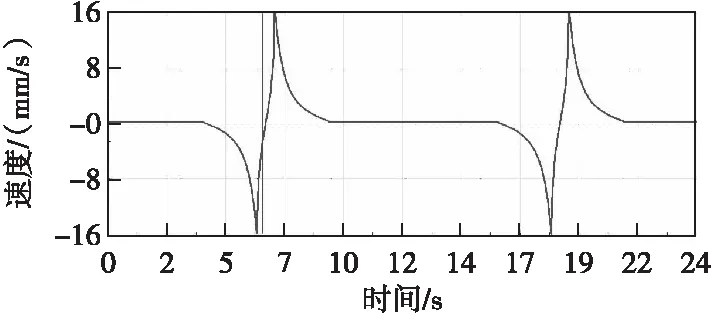
图11 线性速度Fig.11 Linear velocity
隔爆药筒的旋转运动由齿轮驱动,齿轮传动比为1∶1,电机右旋的角度为隔爆药筒的旋转角度。图12所示为6 s时间内隔爆药筒的旋转运动轨迹,药筒随电机作匀速圆周运动,每3 s旋转90°,符合本文设计要求。
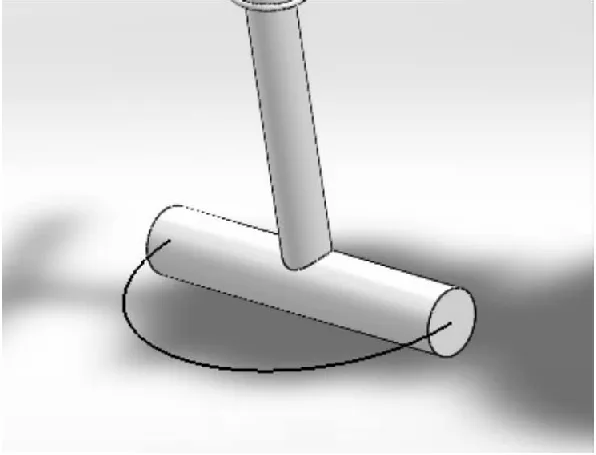
图12 旋转运动轨迹Fig.12 Trajectory of rotation
方案中所涉及的零件均为标准零件,运用技术成熟,降低了隔爆机构的制造成本;步进电机制造技术成熟、转动角度精确,确保了隔爆机构的运动精确性。隔爆机构采用两步解保运动,提高了机构运行的安全性;齿轮传动具有高度的稳定性,方案中使用零件数目少,电子产品仅用了一部步进电机,保证了隔爆机构的可靠性。
4 结论
本文提出一种基于单向轴承的电机驱动可逆式引信隔爆机构,该机构利用步进电机进行双向驱动,可将爆炸序列在待发状态与安全状态之间进行转换,可以实现引信延迟解除隔离,提升了引信检测过程中对隔爆机构动作可靠性的测试性。与现有隔爆机构方案相比,本文提出的方案结构简单、功耗低,隔爆机构自成一体可方便地植入引信系统。
猜你喜欢
内燃机工程(2021年6期)2021-12-10
纺织科学研究(2021年6期)2021-12-02
数学小灵通(1-2年级)(2021年9期)2021-10-12
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
科技视界(2018年21期)2018-12-10
阅读(书香天地)(2018年12期)2018-05-14
建筑工程技术与设计(2015年26期)2015-10-21
新闻前哨(2015年2期)2015-03-11