基于决策树分类方法的小麦油菜种植范围提取
2023-01-03 06:08孙佩汪权方易洁伟康全国张驰尹伟袁知洋
农业与技术 2022年24期
孙佩 汪权方 易洁伟 康全国 张驰 尹伟 袁知洋
(1.湖北省地质科学院研究院,湖北 武汉 430000;2.湖北省硒生态环境效应检测中心,湖北 武汉 430000;3.湖北大学资源环境学院,湖北 武汉 430062)
引言
小麦是谷物的一种,年产量巨大,其产量的87%作为食用,剩余部分基本作为饲料使用,其在我国的种植历史悠久,如果能够准确而及时地获取到小麦的种植面积信息以及种植变化情况,对维护国家粮食安全和保障国民经济稳定发展具有不可忽视的重要意义[3-5]。我国是油菜生产大国,其作为一种不可或缺的经济作物,在我国种植范围广泛[4,5],所以我国油菜的总体面积和全部产量在世界产量和面积中居于第1位。相对于其他农作物而言,这2种作物的消费量、生产量以及贸易量等所占比重都非常大,其在我国的农业生产中有着不可忽视的位置[6]。以前获得农作物种植面积信息的主要途径是以家庭为单位进行人工统计,逐级上报得到农作物种植面积数据。目前,这种方式所统计出来的结果偏差很大,同时消耗大量的人力、物力以及财力,已不能够满足现阶段经济的快速发展[3]。近年来,随着全世界遥感技术的发展,农业遥感技术[7-9]也随之得到全面发展及深入各方面的应用,对于当前农业的转型发展有着不可或缺的作用。农业遥感己经成为一种不可或缺的全新技术手段,对于当前精细农业的发展有着不可或缺的作用。
为了准确获得研究区小麦油菜的种植面积,需要对遥感影像进行目标地物提取。传统的非监督分类和监督分类[10,11]的方法对于大面积的目标地物提取无法达到很好的效果,而无人机[12,13]等先进技术成本高,通过分析2种遥感影像的光谱特征,发现其它地物跟小麦油菜之间的光谱差异在绿光和红光波段上有较大的差异,此外利用NDVI指数、高程和坡度等参数都可以与其它地物进行区分[14],这些情况与决策树方法的原理十分吻合,因此本文选取了经济实用的决策树分类方法研究提取目标地物。
1 研究区域与数据
Landsat系列卫星以及高分一号运行时间跨度较长,空间分辨率相对于其他影像数据较高,能够对小麦、油菜的监测提供长时间序列的影像数据且易获取,可以通过相关网站免费下载,降低监测成本。因此,本文从国际科学数据服务平台以及地理空间数据云获取了荆门市3月的Landsat影像数据以及高分一号数据作为基础数据源,其中Landsat影像数据分辨率为30m,高分一号数据分辨率为2m。
2 提取方法
2.1 小麦油菜解译标志建立
因为遥感影像质量受天气影响较大,因此为了保证完全提取荆门市小麦油菜的种植面积,本文同时使用Landsat系列影像和GF-1影像。利用光谱影像提取目标地物,需判断出目标地物在遥感影像中呈现的光学特征,本文通过在荆门市采集样点,将获得的GPS点来叠加2种遥感影像,从而确定出小麦油菜的光谱特征,如图1所示。

图1 荆门市小麦油菜的解译标志
从图1可以很明显看出,小麦在影像中呈现的光谱特征为深色,油菜在影像中呈现的光谱特征为浅色。
2.2 基于决策树分类方法的小麦油菜面积提取
2.2.1 决策树分类概述
决策树分类法是一种典型的多级分类方法,是由一系列的二叉决策树构成,见图2,是对数据集合从上而下逐层细分的分类方法用于将像元划分到相应的类别,一般情况下,每个决策树在1个分类规则的表达式的基础上将图像中的像元划分为2大类,新的生成类别可以根据其他分类规则继续向下一级分类,达到预期分类结果满意程度[15]。

图2 决策树分类结构示意图
其分类的基本原理是参照各个类别的相近程度逐层向上聚类,每个聚类点形成1个叶结点,在预知各个地物类别样本信息的条件下,同时还可以将该节点继续向下细分,将样本数据细分成若干个子集;以此类推逐层向上聚类,到根节点为止,完成对不同类别的划分提取。一个完整的决策树只有1个根节点,但可以有多个分支和结点,结点有父结点和叶结点之分,每个叶结点只能从属于1个父结点,对于父结点来说,至少含有2个叶结点。纵观决策树的组织结构,起始端为根节点,末端以叶结点为止。根据决策树的组织结构,将选定的数据集作为分类对象逐层划分出树的结点,每个父结点上记录参与计算的数据样本以及对应的分类判别函数,树末端的叶结点记录某一类别的最终分类结果[17]。
利用决策树分类方法对研究区小麦油菜进行种植面积信息提取,能够充分利用影像光谱信息,与此同时在叠合不同数据源的基础上来实现从多层次多角度去获取地物分类特征指标,获得不同地物的分类类别信息。同时,在此基础上,决策树分类方法能够更有效率地处理大量数据以及高维数据,能够全方位分辨目标地物。并且不需要太多的先验知识作为假设条件,其操作过程简单,运行速度较快。所以本文将上述选取的指标和参数作为小麦油菜种植面积的提取依据,运用决策树分类方法对湖北省荆门市研究区域进行地物分类。
2.2.2 决策树分类规则的建立
决策树分类方法具有很多优点,如有较高的分类结果精确,较直观的分类结构,效率较高的运算结果等。本文在ENVI操作软件的基础上构建提取小麦油菜种植面积的决策树模型[16],需建立分类规则,本文将通过对遥感影像图上主要地物的光谱特征进行仔细分析,从而获得决策树分类所需的分类规则。
2.2.2 .1 光谱特征分析
在空间分辨率为30m的Landsat影像上采集主要典型地物的光谱特征,第8波段为全色波段,因此本文没有使用该波段的光谱特征,如图3,在第3波段(红光波段)上裸地和建筑用地的DN值明显高于其它地物;在第4波段(近红外)上小麦和油菜的DN值明显高于其它地物,且油菜的DN值最高;在第5波段(红光波段)上小麦和油菜的DN值明显小于居民地和裸地的DN值;第6波段(短波红外)上小麦和油菜的DN值明显大于水体;在第7波段上小麦和油菜的DN值明显小于居民地和裸地;第10波段上裸地的DN值明显的高于其他主要地物。

图3 Landsat影像地物光谱特征曲线图
综上可以发现,不同地物在不同波段上表现出不同的差异,不论地物光谱特征怎么混淆总是会在某个波段上的光谱值具有明显的差异,因此通过不同地物的光谱特征可以有效提取目标地物——小麦和油菜。为了获得更加精确的光谱特征分析结果,本文总共采集600个样点覆盖主要地物,从而获取得到主要地表物质在不同波段上的光谱灰度区间,见表1。
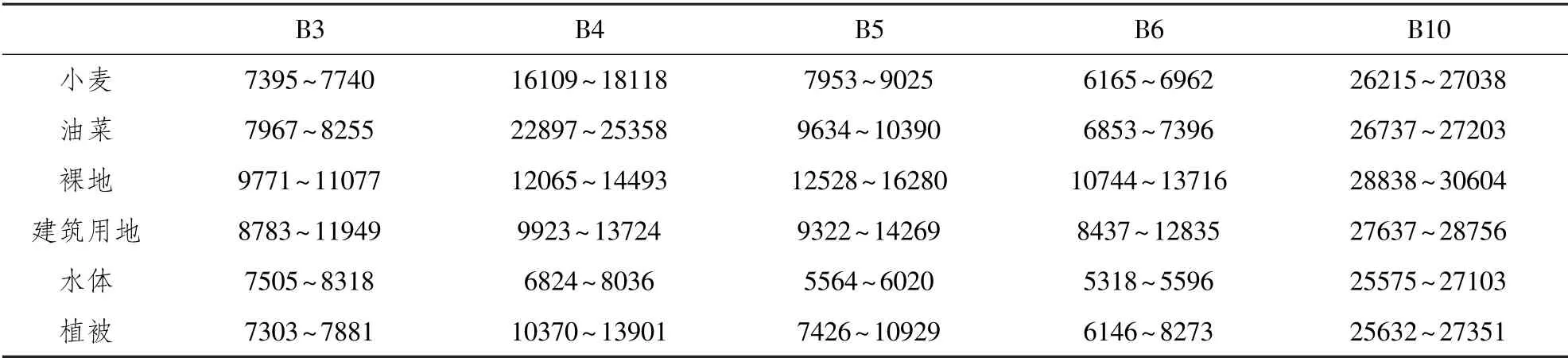
表1 不同地物在差异波段上的光谱灰度值区间
同理,利用相同的方法也可以得到GF-1影像的光谱特征曲线,见图4。
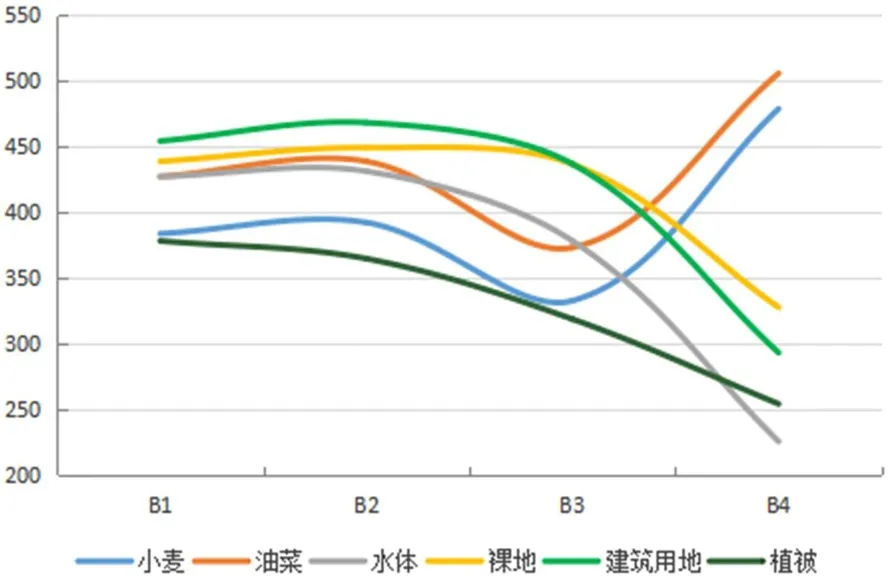
图4 GF-1影像地物光谱特征曲线图
同样采集600个样点覆盖影像中的主要地物,获取GF-1影像中主要地表物质在不同波段上的光谱灰度区间,见表2。

表2 不同地物在差异波段上的光谱灰度值区间
2.2.2 .2 分类规则的建立
通过上面的分析,进而获得决策树分类规则,过程如下。
第5波段上水体的DN值明显小于其它地物,根据表1,取第5波段上水体的最大DN值与小麦油菜的最小DN值的平均值来制定约束条件B5(表示地物波段,下同)>12050,作为小麦识别决策树模型的第1层约束条件,见图5,从而分离了水体和其它地物。

图5 Landsat影像小麦油菜决策树模型
裸地在第10波段上的DN值较大,明显大于其它地物的DN值,结合表1,取B10上裸地的最小DN值与小麦油菜的最大DN值的平均值作为的指定约束条件B10<27750作为小麦识别决策树模型的第2层约束条件[16],从而分离出裸地。
根据图3,裸地和建筑用地在第4波段上的像元DN值小于第5波段上的像元DN值,而小麦、油菜和植被在第4波段上的像元DN值大于第5波段上的像元DN值,所以指定约束条件B5>B6作为小麦识别决策树的第3层约束条件[16],从而分离了小麦、油菜、植被和裸地、建筑用地。
为了进一步分离出其它非目标地物,将小麦和油菜的DN值在B3、B6上较低这一光谱特征引入一些约束条件,小麦的DN值在B3上的区间为7395~7740,在B6上的区间为7953~9025;油菜的DN值在B3上的区间为7967~8255,在B6上的区间为9634~10390[16],综合2个灰度区间,得到7300<B3<8300,7900<B6<10400。
植被和小麦油菜的光谱特征非常相似,在除了第4波段以外的所有波段几乎都无法分离出植被,因此利用第4波段上植被的像元DN值较小这一特征分离出植被,取第4波段植被最大DN值与小麦的最小DN值的平均值作为小麦油菜识别决策树的第5层约束条件B4>15000。
通过以上步骤已经将小麦和油菜从其它地物中分离出来,观察第4波段,油菜的DN值远远大于小麦的DN值,因此可以利用这一特征将小麦和油菜区分,取第4波段小麦的最大DN值与油菜的最小DN值的平均值作为第6层决策树的约束条件B4>20500。
同理,运用上述的分析方法可以得到GF-1影像的小麦油菜决策树模型,如图6所示。
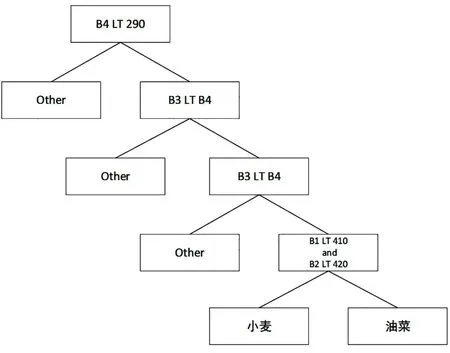
图6 GF-1影像小麦油菜决策树模型
通过上面的步骤就可以完成小麦油菜识别决策树模型的分类规则的建立,然后利用ENVI中的决策树方法,建立分类规则,从而达到精准分离出目标地物——小麦和油菜,排除其他地物对提取结果的干扰。分类结果主要以Landsat影像为主,GF-1影像数据作为补充。
3 实验结果与分析
3.1 分类结果与分析
通过创建分类规则,使用决策树分类的方法不断剔除掉与小麦、油菜混合的地物,从而得到小麦、油菜的种植面积,在Arcgis中获取矢量化的结果,并对结果进行局部的修改,去除自动分类不精确的部分,如错分、漏分等,从而提高分类结果的精度,图7、图8分别为小麦、油菜分类结果与原始影像的叠加效果图,可以很明显地发现,通过决策树分类获得的矢量结果与影像中的地物十分吻合,说明分类效果很好,可靠性高,可以用于后续的数据分析。

图7 小麦分类结果与影像叠加图

图8 油菜解译结果与影像叠加图
3.2 精度验证
使用决策树分类方法,可以将不像小麦油菜信息以及一些明显易混信息进行逐次剔除,为了能够得到更准确的分类验证结果,需对影像分类结果生成600个随机点,同时和影像真实值进行对比分析,在识别过程中发现小麦油菜与水体、道路以及其他植被的错分情况比较小,小麦油菜提取精度的错分情况主要是由于其他农作物的混淆造成。600个随机样点中正确数有520个,错分数仅80个,总体精度达到了86.67%,说明所构建的决策树分类结果基本可以满足研究需要。
4 结论与讨论
我国是农业大国,而农业的发展最主要还是取决于耕地面积的多少,我国土地面积虽然广阔,人均耕地面积极少,这是我国农业发展的主要限制问题,但是不合理的土地利用又会造成大面积的土地浪费或者污染。
根据本文试验研究,Landsat影像数据和高分一号影像数据能够满足对于小麦油菜信息提取的精度需要,通过决策树分类的方法能够更有效地将影像多个波段信息有机组织结合起来,详细利用不同光谱信息以及指标参数提取了较长时间序列的影像数据,其分类精度也达到了本文研究需求。决策树分类方法可以规避非监督分类里面出现的一些缺点,同时可以避免监督分类中其他分类方法的缺点,发挥其优点。
猜你喜欢
成都信息工程大学学报(2019年3期)2019-09-25
电子制作(2018年16期)2018-09-26
数学物理学报(2018年1期)2018-03-26
中央民族大学学报(自然科学版)(2016年4期)2016-06-27
高师理科学刊(2016年8期)2016-06-15
西藏科技(2015年4期)2015-09-26
郑州大学学报(医学版)(2015年1期)2015-02-27
河北北方学院学报(自然科学版)(2014年2期)2014-05-30
河南科技(2014年18期)2014-02-27
电子设计工程(2014年12期)2014-02-27