
商用车AMT车重快速自学习方法
2022-12-29 06:06侯圣栋刘恩良张思远张帅帅
汽车实用技术 2022年23期
侯圣栋,王 磊,刘恩良,张思远,张帅帅
商用车AMT车重快速自学习方法
侯圣栋,王 磊,刘恩良,张思远,张帅帅
(陕西重型汽车有限公司 汽车工程研究院,陕西 西安 710200)
整车载荷是重型商用车换挡规律非常重要的控制输入量,可以根据动态载荷对挡位进行差值修正。文章以一款全自动变速器(AMT)车型为研究对象,通过起步过程的动力学分析,提出了一种在起步过程中进行车辆质量自学习的方法。试验表明,此方法可以快速估算车辆质量,精度满足换挡规律的要求,解决了车辆空载新的驾驶循环前几次换挡驾驶性差的问题,满足驾驶员需求。
商用车;全自动变速器;起步过程;车重自学习方法;换挡规律
整车载荷和坡度阻力是重型商用车换挡规律的两个重要控制输入量,可以根据动态载荷和坡度的识别对挡位进行差值修正[1]。根据车重及加速度综合判断,采取不同的换挡方式和换挡转速,满载多采用顺序换挡、换挡点较高,空载多采用跳挡换挡,换挡点较低。因此,掌握车辆载荷的实时变化,对保证整车平顺性、经济性及动力性极为重要。
在车辆质量自学习方面,国内积累了一定的工程经验,主要是在换挡和在挡过程中基于车辆动力学理论进行计算的,存在的问题车辆空载状态下驾驶循环的前几次换挡默认的是满载工况(车重未算出,默认满载工况,起步挡位低,防止车辆起步失败),驾驶感受较差,通过调研,驾驶员抱怨较大。本文通过起步过程的动力学分析,提出了一种在起步过程中进行车辆质量自学习的方法,新的驾驶循环的第一次换挡就已经参考了实际车辆质量,对目标挡位进行了修正。通过仿真及实车验证,车重自学习的速度和精度可以满足换挡策略的需要,驾驶感受明显提升,此方法是换挡和在挡工况车重估算的有效补充。
1 车辆质量自学习原理分析
1.1 自学习原理分析
车辆在无制动工况行驶过程中,满足如下汽车行驶方程式

因为车辆起步过程速度较低,空气阻力可以忽略,将式(1)进行简化,得到式(2):
式中,为汽车驱动力;为整车质量;为车辆加速度;为阻力系数,为道路坡度。
1.2 起步过程分析
起步过程比较复杂,为了更好地进行分析,建立了离合器传动系统模型,如图1所示。起步分为两种类型[2]:
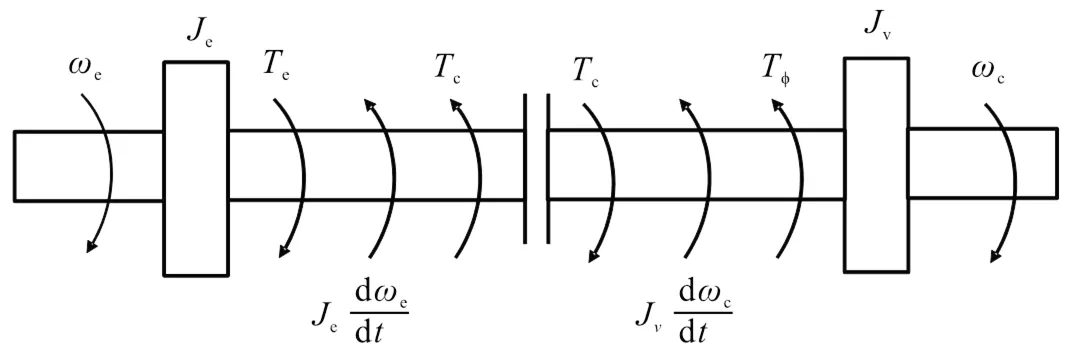
图1 离合器传动系统模型
(1)自动起步:手柄在D/R挡,松开刹车,不踩油门,车辆蠕行。
(2)踩油门起步:手柄在D/R挡,松开刹车,踩下油门。这两种起步工况离合器传递扭矩都可以用式(3)表示:

式中,为角加速度;为转动惯量。
起步过程主要包含三个阶段[3]。
第一阶段:离合器没有结合,其传递扭矩为零;
第二阶段:离合器滑磨阶段,车辆开始起步;
第三阶段:离合器完全结合,主动盘同步。
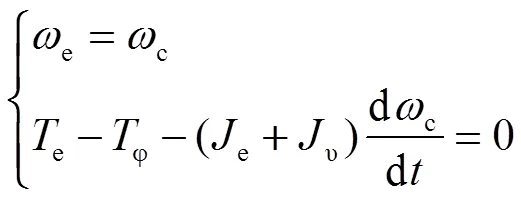
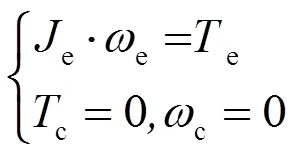
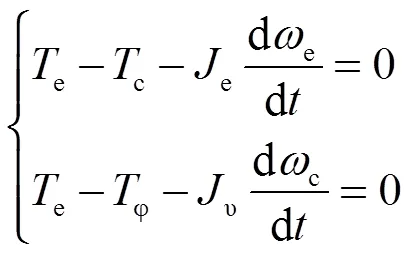
式中,e为发动机扭矩;Tφ为行驶阻力矩;c为离合器扭矩;e为发动机转动惯量;υ为离合器从动盘转动惯量;e、c为离合器主、从动盘角速度。
结合式(4)、式(5)及式(6)可知,在离合器滑磨阶段,可以计算发动机转速的角加速度,若发动机转速稳定,则离合器所传递的扭矩等于发动机扭矩;在离合器完全同步后,离合器传递扭矩等于发动机扭矩。
1.3 自适应条件及方法确定
通过1.2节可知,在离合器滑磨阶段,只有发动机角加速度为零时,传递到轮端的扭矩才等于发动机扭矩,为了提高车辆质量自学习的精度,此控制策略触发条件要考虑发动机转速变化率、油门踏板变化率;车辆加速度大于零。
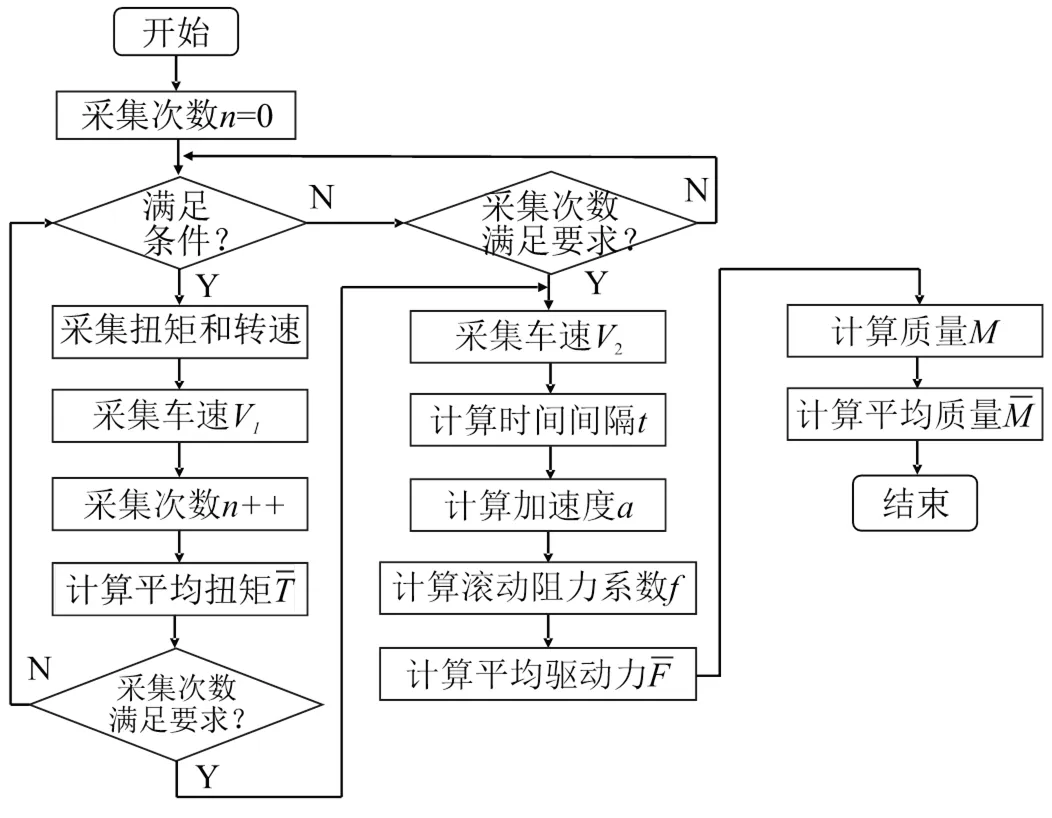
图2 自适应流程图
1.3.1自适应方法
自适应计算流程如图2所示。
1.发动机实际扭矩计算
基于SAEJ1939协议,可以通过控制器局域网络(Controller Area Network, CAN)读取相关数据计算发动机实际扭矩,如表1所示。
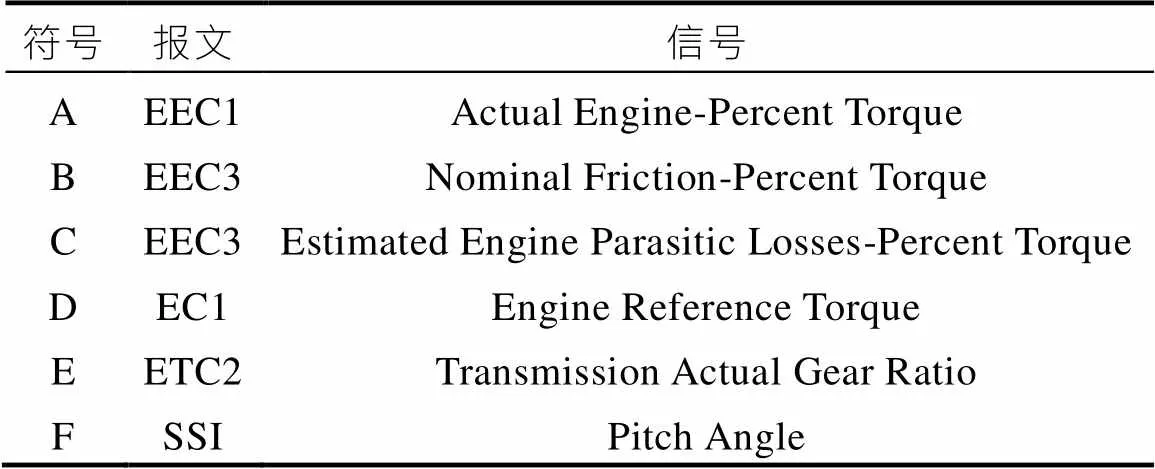
表1 信号列表
发动机实际扭矩用式(7)计算:
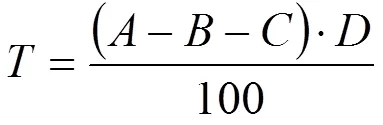
2.驱动力计算
轮端驱动力用式(8)表示:
式中,为驱动力;为发动机扭矩;g为变速器速比;0为主减速比;为传动效率;为轮胎半径。
3.加速度计算
由于自适应过程要求油门踏板稳定且检测时间较短,可以认为加速过程是匀加速过程,加速度用式(8)表示:
4.滚动阻力系数计算
利用经验公式估算轮胎滚动阻力系数如下[4]:
=0.007 6+0.000 056.a(10)
5.坡度计算
根据SSI报文读取坡度值(Pitch Angle)。
根据式(7)—式(10)计算结果,代入式(2)计算车辆重量。
1.3.2换挡规律修正
任意载荷下的换挡线通过插值得到,表达式如式(11)和式(12)所示:
m=m(-e)+e(11)
m=(f-e)/(f-e) (12)
式中,为整车实际质量;e为空载整车载荷;f为满载整车载荷;e为空载换挡点车速;f为满载换挡点车速。
2 仿真试验
2.1 仿真模型搭建
为验证起步过程车重自学习算法,以某款X5000试验车为例采集国道和高速的行驶数据。车辆配置如表2所示。
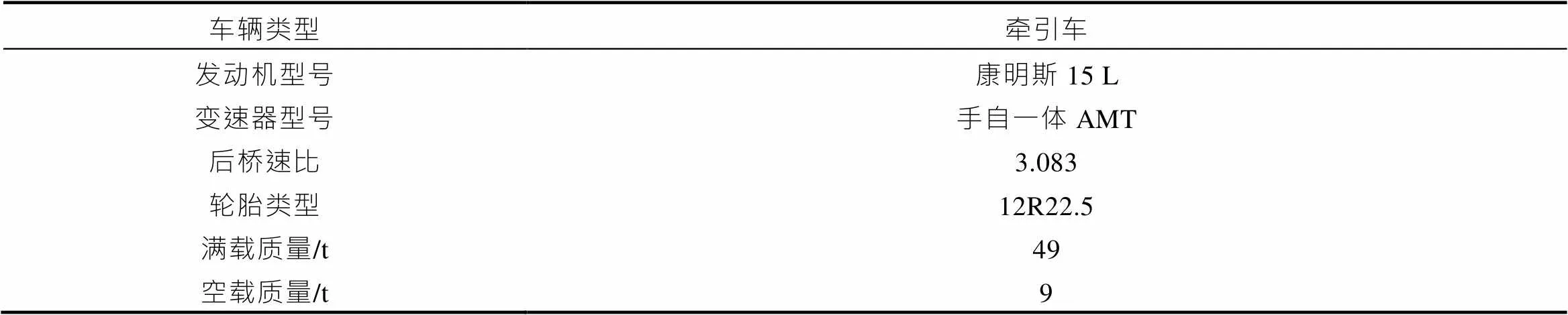
表2 车辆配置
通过Matlab/Simulink搭建仿真平台,包括三个状态,即Init、Collect和Update三个状态,如图3、图4所示。
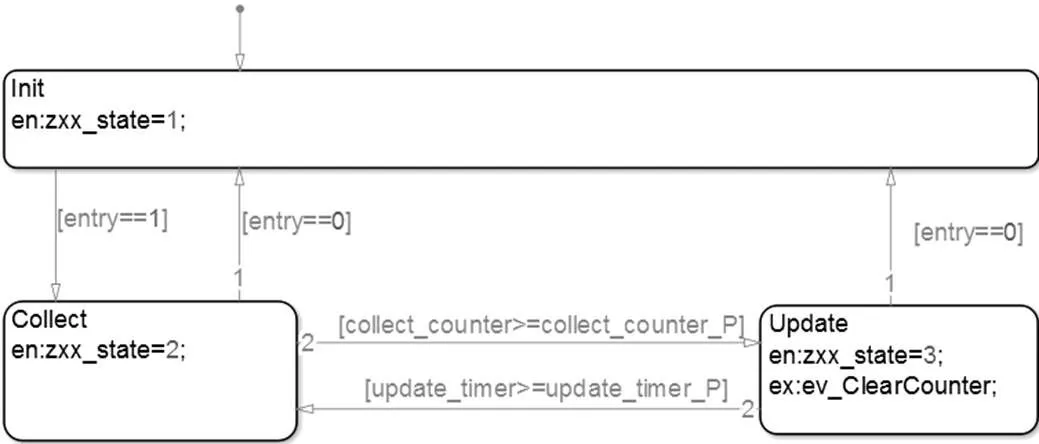
图3 车重自适应算法状态机
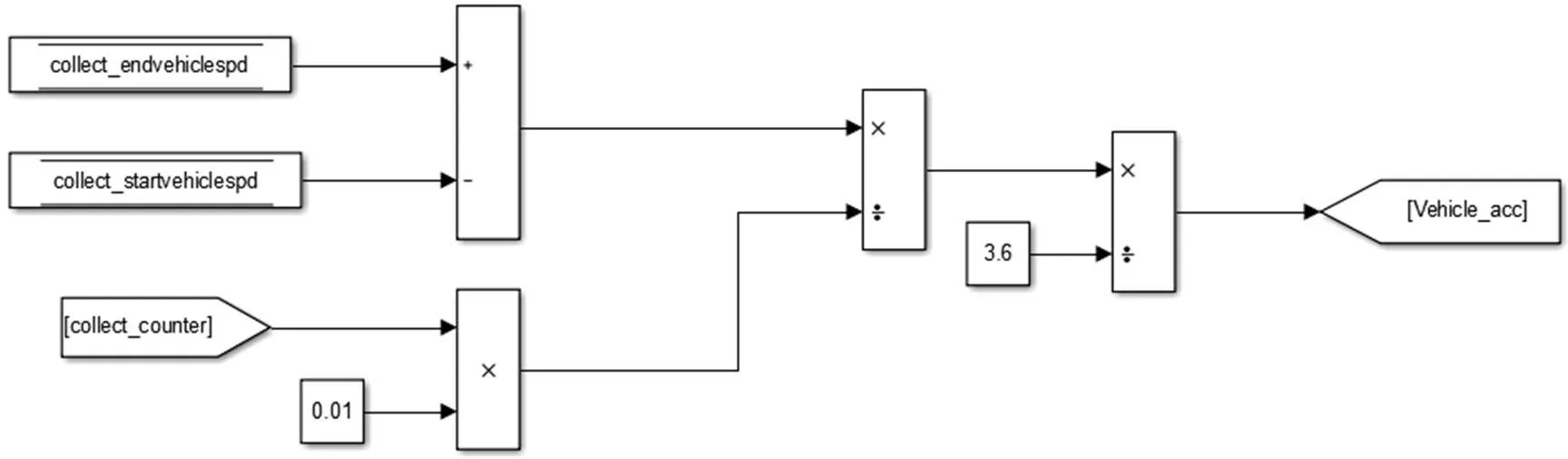
图4 车辆加速度计算
发动机平均扭矩仿真如图5所示。
平均质量仿真模型如图6所示。
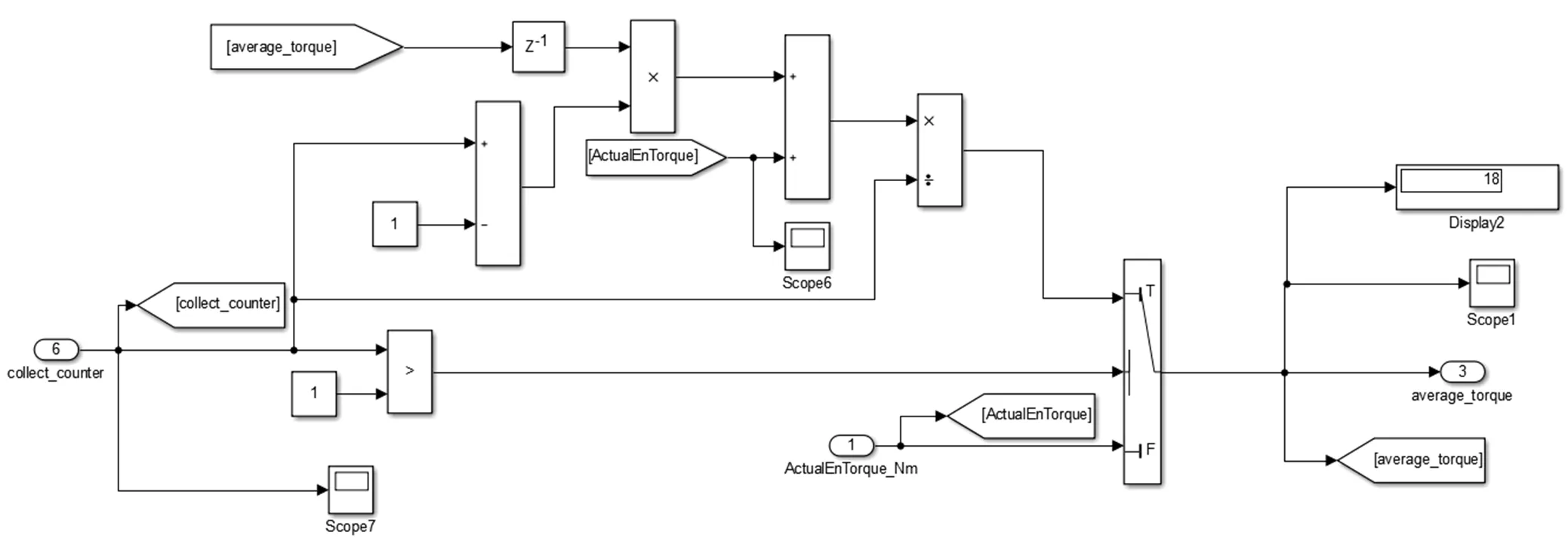
图5 发动机平均扭矩计算
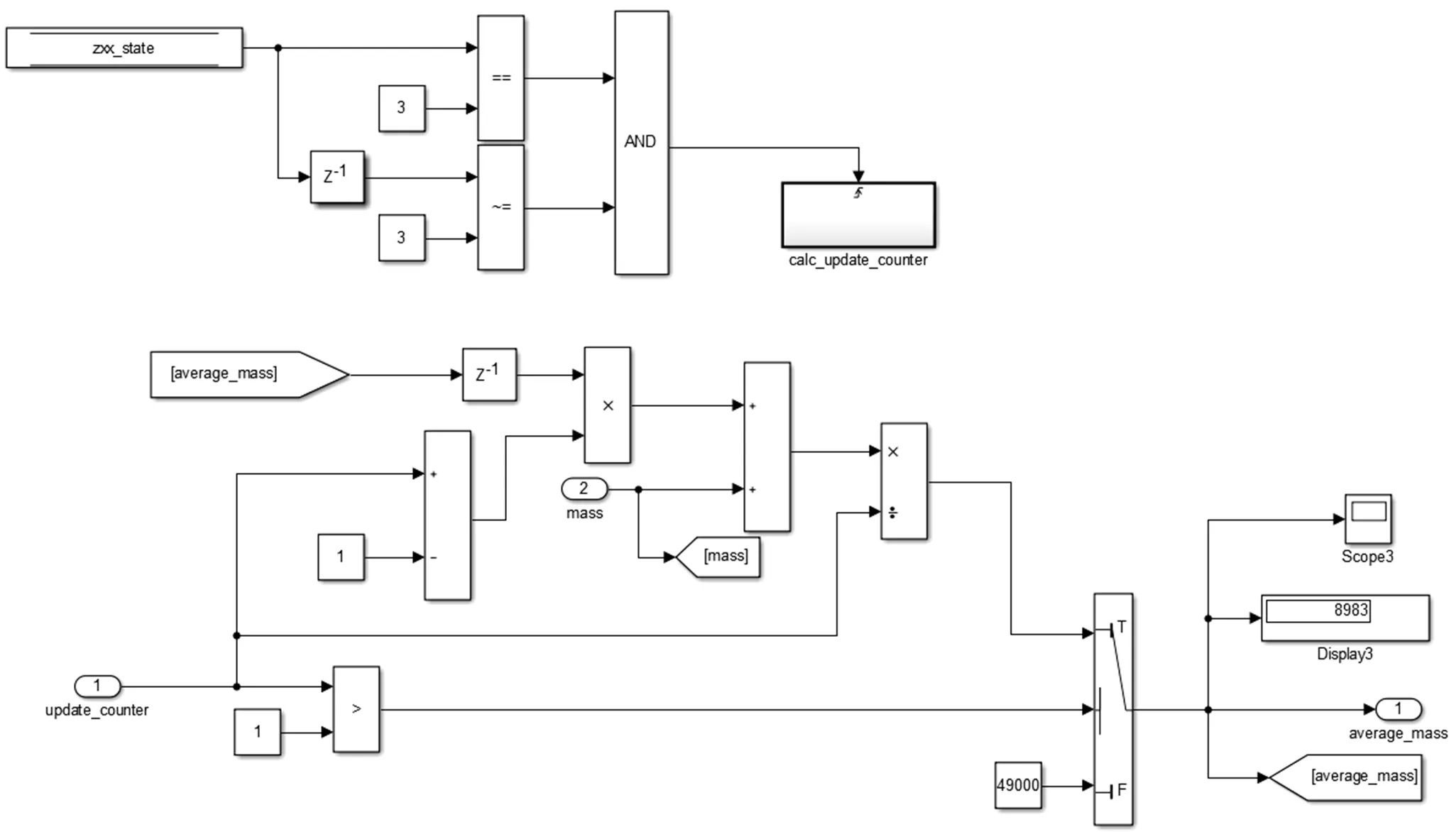
图6 平均质量计算
按照上述算法车重计算结果如图7所示。
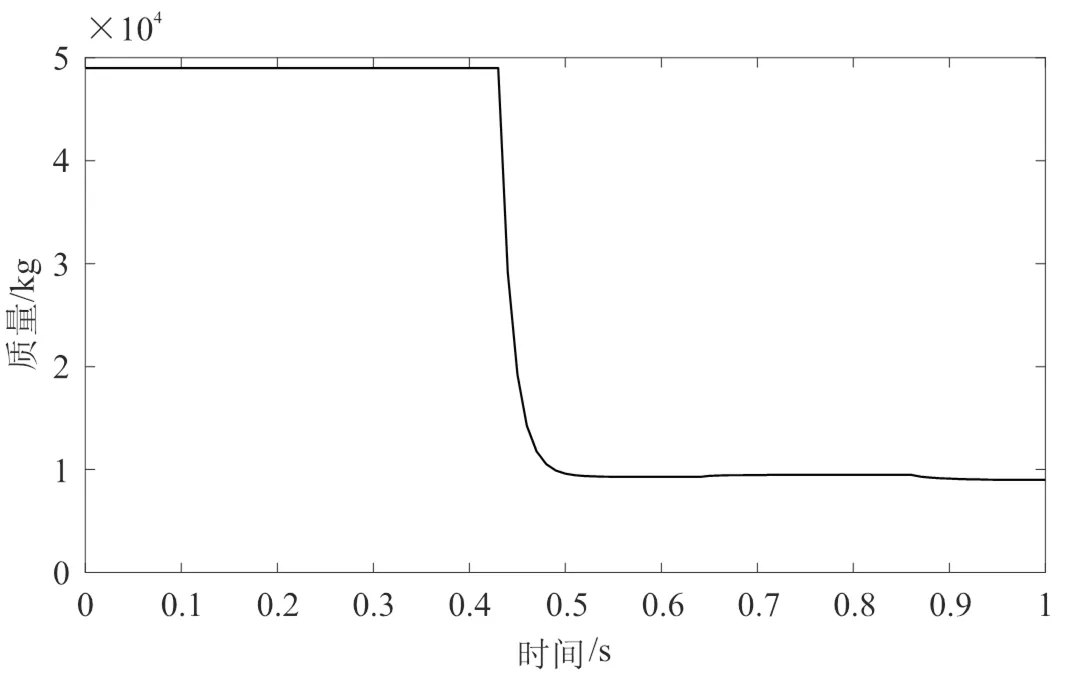
图7 车重计算结果
通过计算结果可以看出,车重默认满载,即49 t,在达到稳定后,平均质量8.9 t,能够在实际车重附近(空载质量9 t,如表2所示),满足车辆估计的需求。
3 试验验证
本文所述的车重自学习算法应用于AMT重型商用车上,整车空载质量9 t,自学习平均质量8.42 t,误差满足AMT换挡规律车重补偿算法的要求,计算速度较快,起步过程即可完成车重计算,起步完成后第一次换挡平顺性明显提高。结果如图8所示。
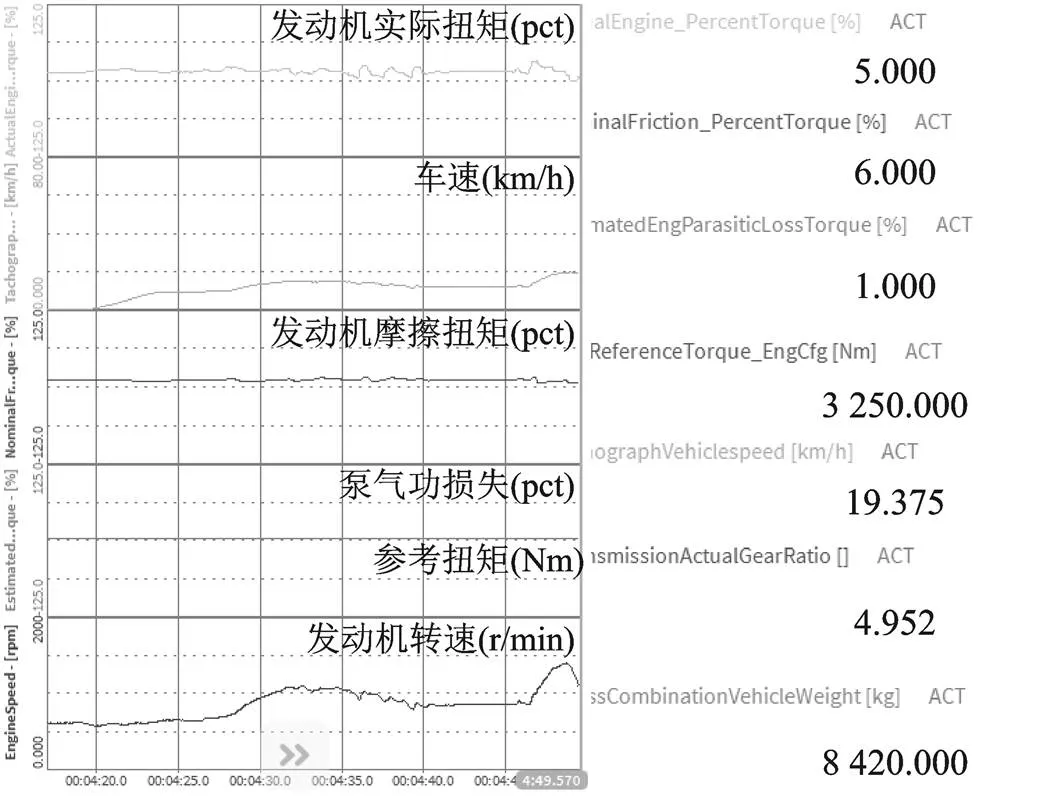
图8 实车测试车重计算结果
4 结论
本文通过分析商用车离合器扭矩特性及起步控制过程,提出了一种在起步过程中车辆质量自学习的方法,通过质量补偿对换挡策略准确修正,计算合适的换挡点,通过Matlab/Simulink搭建控制模型及进行实车验证,试验表明,本文提出的质量自学习方法满足AMT换挡策略的应用,空载驾驶性明显提升。解决了空载车辆默认重载驾驶性能差的问题,由于车辆车速传感器精度的限制,车辆空载起步时较易触发此策略,满载时触发次数相对较少,但策略默认为重载,不影响重载驾驶性能。
[1] 师帅,刘四海,吕二华,等.基于载荷和坡度的商用车AMT换挡规律修正方法[J].传动技术,2018,32(2): 18-20.
[2] 俞晓璇,王海峰,夏俊超,等.AMT离合器起步控制分析[J].内燃机与动力装置,2016,33(3):14-17.
[3] 王建忠.商用机械式自动变速器控制策略关键技术研究[D].长春:吉林大学,2014.
[4] 余志生.汽车理论[M].北京:机械工业出版社,2009.
Fast Self-learning Method of Commercial VehicleAMT Vehicle Weight
HOU Shengdong, WANG Lei, LIU Enliang, ZHANG Siyuan, ZHANG Shuaishuai
( Institute of Automotive Engineering R & D, Shaanxi Heavy Duty Automobile Company Limited,Xi’an 710200, China )
The load of the vehicle is a very important control input for the shifting rule of heavy commercial vehicles.According to the dynamic load,the gear difference is corrected. This paper takes an automatic transmission(AMT) model as the research object,through the dynamic analysis of the launch process,a self learning method of vehicle mass in the starting process is proposed.The experimental results show that this method can quickly estimate the vehicle weight,and the accuracy meets the requirements of shifting.It solves the problem of poor driving performance in the first few shifts of the new driving cycle without load,and meets the driver’s needs.
Commercial vehicle; Automatic transmission(AMT); Launch process; Self-learning method of vehicle weight;Shifting rule
U463.212
A
1671-7988(2022)23-93-05
U463.212
A
1671-7988(2022)23-93-05
10.16638/j.cnki.1671-7988.2022.023.017
侯圣栋(1986—),男,硕士,工程师,研究方向为AMT自动变速器控制理论及应用,E-mail:hsd7531346 @126.com。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年17期)2022-09-16
汽车实用技术(2022年2期)2022-02-21
商品与质量(2020年41期)2020-11-09
商品与质量(2019年20期)2019-09-27
汽车与安全(2019年3期)2019-06-21
汽车与安全(2019年12期)2019-05-14
北京汽车(2018年5期)2018-11-07
汽车维修技师(2017年9期)2017-02-04
汽车维修与保养(2015年12期)2015-04-18
