城轨线路ATO系统控车策略优化
2022-12-26 12:29:46吴大武
铁路通信信号工程技术 2022年12期
吴大武
(合肥市轨道交通集团有限公司运营分公司,合肥 230092)
城市的不断发展,城市轨道交通的高效运营是国内城市发展的必然趋势,而列车控制系统自动化程度的好坏将是城市轨道交通发展的关键所在[1]。ATO子系统作为列车运行控制系统的重要组成部分之一,起着十分重要的作用。ATO在ATP子系统的安全防护下,高效、经济、合理地控制列车的牵引和制动,实现列车自动驾驶、区间运行、精确停车、节能控车等功能。因此良好的ATO系统控车策略对于城市轨道高效发展具有重要意义。
1 概述
1.1 研究背景与现状
目前,国内外已有大量针对列车控制系统自动化策略的研究。文献[2]将牵引与制动作为控制变量,计算列车的最优控制序列。文献[3]提出基于模糊Petri神经网络系统,深入研究了系统动态特性的影响,从而提高ATO控制算法的精准性。新加坡国立大学的 Chang C.S 教授对列车运行惰行点位置进行研究,通过遗传算法优化列车运行方案[4]。文献[5]将模糊控制和预测理论运用到列车控制系统,提出了预测模糊列车控制系统。
列车控制信号系统在合肥3号线工程应用过程中,因列车信号传输具有较大延时,不同列车性能存在差异性且道路环境因素复杂,导致控车难度较高。本文设计实现一种基于追赶时间计算控制的ATO制动控制优化策略,能够有效地解决实际存在的工程应用问题,保证ATO系统的精确控制。如图1所示。

图1 ATO控制系统模型示意Fig.1 Model of ATO control system
1.2 列车制动系统与性能
合肥3号线列车的制动系统包括电制动、空气制动、以及电气指令单元。该制动系统为计算机闭环控制的控制系统,采用分散式控制,即以每个转向架为单位设置单个制动控制单元。车与车之间的接口、功能相匹配,编成列车后不互相干扰[6]。在与ATO系统交互时,能够实时接收ATO的控制指令,并依据指令进行相应制动力的输出。
在列车进站停车制动过程中,低速下的电制动与空气制动的转换十分关键,即混合制动阶段,在此转换过程中,由于车辆的制动系统是多系统配合且响应ATO系统制动级位延时较大,因此制动可控性不足。如何适应多列车的不同制动性能状态而有效控车成为ATO自动驾驶系统制动控制策略制定的研究难点。
2 ATO制动控制策略的优化
在进站停车过程中,面对列车运行系统大延时、非线性等特点,本文研究一种基于追赶时间计算控制的列车制动控制策略,能够有效解决列车制动过程中舒适度与停车精度等问题。
本文描述的追赶时间算法应用于控制列车至目标点或停车点。假设当前列车均减速运动至目标点或停车点前配置值,计算实际运行时间racttime,如公式(1)所示。计算目标速度和当前速度的差值,若此差值小于0,即目标速度小于当前速度,则计算各个级位消除速度差的追赶时间catchtime,如公式(2)所示,选取小于racttime的最大追赶时间对应的级位,如图2所示。若此差值大于0,即目标速度小于当前速度,计算能够减小速度差的各个级位消除速度差的追赶时间catchtime,选取大于racttime的最大追赶时间对应的级位,如图3所示。
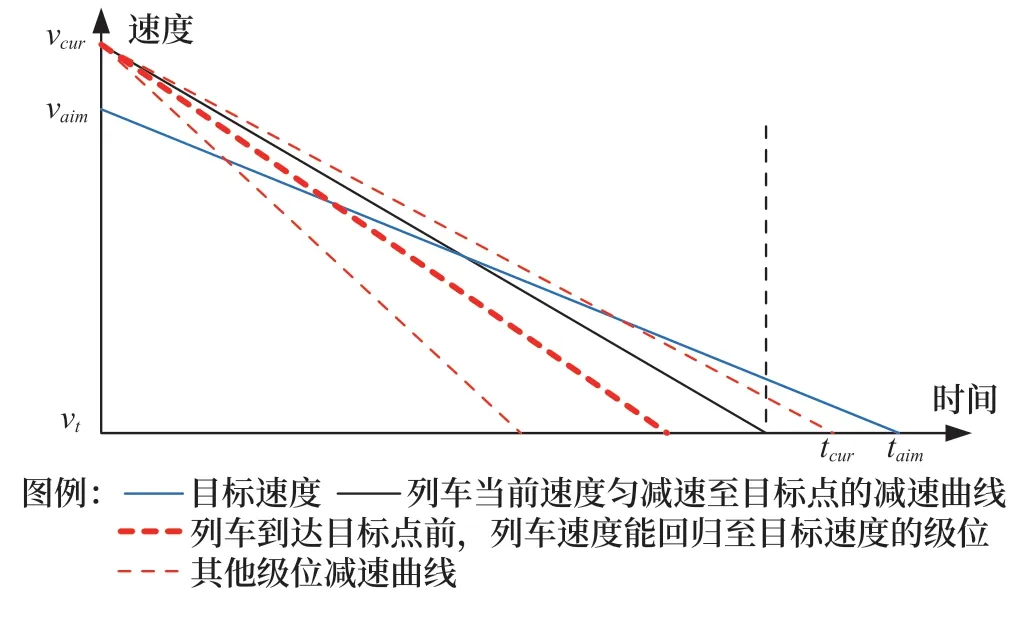
图2 目标速度小于当前速度示意Fig.2 Target speed is less than the current speed

图3 目标速度大于当前速度示意Fig.3 Target speed is greater than the current speed

St和vt为配置值,Scur和vcur如公式(3)所示为当前的列车位置和速度,v级位如公式(4)所示为级位的减速率考虑坡度影响后的综合减速率,对应的级位即为列车电流环相对应的电流值,控制列车的牵引和制动。

每次选取出列车能够达到目标点前,列车速度能回归至目标速度,同时满足最高舒适度的追赶曲线所对应的级位作为控车级位,将会控制列车贴近目标速度曲线。当使用无级控车时,即电流环步长划分更加精细,此曲线将会更加精细地贴近目标速度曲线,并最终达到精确控车的目的。
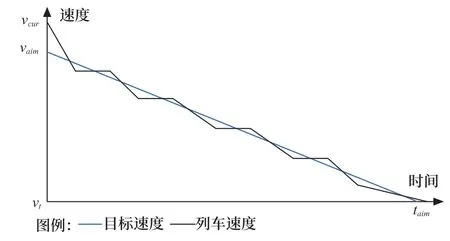
图4 追赶时间控车算法最终效果示意Fig.4 Schematic diagram of the final effect of the chasing time train control algorithm
当列车从当前位置以当前速度做匀减速运动至目标点时,若平均减速度与某个级位的减速率接近,微小的速度差就会对追赶时间造成很大的影响,加上列车的延时,此时容易出现级位连续减小,对于延时大的车辆,这种效果尤为显著,为避免这种情况出现,在距离目标点一定位置时,提前进入下一状态机,即当需要从惰行转制动时,在未到达目标速度与目标距离时,提前进入减速状态。
另外,当列车进入电空转换阶段时,由于控制效果差,不能很好的响应ATO系统输出的级位,从进站制动过程采用一次制动停车曲线控车算法,优化为在电空转换过程中施加小制动甚至惰行的控车曲线算法,从而缓解车辆制动力固有离散性引起的ATO停车精度差的问题。在列车电空转换过程后,将继续以追赶时间控制算法控制列车精确停车。
3 列控系统ATO控车策略的应用
合肥3号线为使ATO控车更加精确,提升控车舒适度。采用追赶时间ATO控制策略,使得控车更加精确,提升区间运行舒适度与站台停车精度。
舒适度优化前的停车曲线如图5所示(依据合肥3号线现场数据绘制)。
同一区间绘制舒适度优化后的停车曲线如图6所示。从优化后的控车曲线可以明显看出,列车在进站制动过程中,列车实际运行曲线更加贴近命令速度曲线,速度变化更为平缓,冲击率下降,有效提升乘车舒适度。

图6 舒适度优化后合肥3号线同一区间控车曲线示意Fig.6 Train control curve of the same section of Hefei Line 3 after comfort optimization
同时在采用优化后的追赶时间ATO控制策略下,采用合肥3号线调试前、后数据分析如图7、8所示。

图7 合肥3号线控车策略优化前停车误差Fig.7 Stop error before the optimization of train control strategy for Hefei Line 3
4 结束语
本文提出一种ATO系统进站制动的控制策略,能够实时计算ATO命令速度曲线并进行速度修正,通过合肥3号线列控系统的现场验证。本文提出的制动控车策略更为精准,同时能够适应不同车型与环境,优化ATO系统的乘车舒适度与停车精度,在列控信号系统精确控车工程应用方面具有实用价值。

图8 合肥3号线控车策略优化后停车误差Fig.8 Stop error after the optimization of train control strategy for Hefei Line 3
猜你喜欢
城市轨道交通研究(2024年1期)2024-02-23 07:28:36
疯狂英语·初中天地(2022年2期)2022-07-07 08:50:46
疯狂英语·初中版(2022年2期)2022-05-04 13:54:49
纺织科学研究(2021年9期)2021-10-14 08:52:12
铁道通信信号(2020年1期)2020-09-21 08:55:16
现代城市轨道交通(2020年1期)2020-02-14 15:35:49
铁道通信信号(2020年11期)2020-02-07 01:02:34
浙江工业大学学报(2017年5期)2018-01-22 02:03:36
发明与创新(2016年33期)2016-08-21 13:22:22
中共合肥市委党校学报(2014年2期)2014-08-03 05:58:26