
NR在60 GHz定位过程的隐藏节点规避方法
2022-12-26 12:54张文璐朱振杰崔琪楣陶小峰
计算机测量与控制 2022年12期
张文璐,朱振杰,崔琪楣,陶小峰
(北京邮电大学 信息与通信工程学院,北京 100074)
0 引言
近年来全球定位系统、工业物联网、自动驾驶、室内地图、共享单车等基于位置的新型服务不断涌现,高精度定位被认为是自4G之后移动通信系统必不可少的泛在服务之一。精确位置信息的获取还有助于增强5G网络在位置感知多媒体数据传输、基于位置的通信安全等方面的服务性能[1]。在5G异构网络场景中,精确的位置信息有助于提高无线资源的使用效率,提供准确的资源调度和链路适应;在高度动态场景中,可以使用定位信息预测所需的无线资源;在多跳无线网络中,对无线节点进行定位可以降低功耗。定位技术的应用范围也从室内区域逐渐进展到大范围的卫星覆盖。对于未来工业物联网(IIOT,industrial internet of things)等垂直行业应用场景和用例,位置信息更为重要[2]。
为了实现高精度和高效率的目标,5G NR Rel-16对定位技术进一步深入研究。在定位系统中,定位技术通常是基于特定类型的度量来定义,基于时间的技术利用射频信号的传输时差来计算收发器之间的距离,如观测到达时差(OTDOA,observed time difference of arrival)、上行到达时差(UTDOA,uplink time difference of arrival)、多小区往返时间(Multi-RTT,multiplecell-round trip time);基于角度的技术利用发射天线形成的信号和接收天线之间的相位差异在计算收发器之间的角度,如下行离开角(DL-AoD,downlink angle-of-departure)、上行到达角(UL-AoA,Uplink angle-of-arrival);混合的技术利用时间和角度联合估计终端的距离。除了上述依赖于RAT的解决方案,还存在一些其他的解决方案,如全球导航卫星系统(GNSS,global navigation satellite system)和气压等技术[3]。虽然全球定位导航系统是目前最流行的室外定位技术,但在遮挡物较多的城市地区,如密集的城市环境、隧道和地下停车场,卫星信号的衍射会造成较大的定位误差[4]。因此,深入研究基于RAT的定位技术仍是非常必要的。
当前的定位技术大多工作于在较低频段,低频段的频谱资源十分紧张,难以满足高精度定位的要求,因此,拥有近7 GHz带宽的60 GHz毫米波频段受到了极大的关注[5]。更多的带宽资源可以提供更高的测量精度,从而极大降低NR定位技术的定位误差[6]。相比低频段的定位技术,60 GHz毫米波的时间分辨率更高、多径分辨能力更强,可以实现厘米级别的定位[7]。此外,毫米波频段的波束赋型技术可形成高度定向的收发波束,有效规避潜在的干扰,缓解毫米波频段的高路径损耗的问题[8]。但是,由于5G网络是多网异构共存的,存在众多不同无线接入技术(RAT,radio access technology)的设备,如蜂窝网络、Wi-Fi、物联网等,即使NR-U设备采用先听后说(LBT,listen before talk)接入60 GHz无线信道,仍无法有效规避隐藏节点[9-10]。隐藏节点会干扰定位信号的传输,而无法被终端与基站端得知,严重影响了NR-U设备的定位性能[11]。
针对上述问题,本文提出在NR-U设备的定位过程中实时动态调整定位信号的空间关系,使其发射方向绕过潜在的隐藏节点,以提升定位信号的传输可靠性,进而实现高精度的定位。具体来说,在定位信号的测量过程中,若某定位信号的接收信噪比很低,则更新其准共址(QCL,quasi co-location)关联的参考信号为接收质量最佳的信号,使该定位信号朝向信道状况较好的方向定向发射。并且,本文针对不同的实际情况设定了不同的调整方案,在各种信道状况下均能实现精确的上行定位,有效降低了隐藏节点对定位性能的影响。本研究工作具有较强的现实意义与应用价值,为NR-U设备在60 GHz的网络部署提供了理论依据。
1 问题分析
本节以上行定位参考信号(SRS-pos,sounding reference signal-positioning)的传输与探测过程为例,分析60 GHz非授权频段的特性对NR定位性能的影响。在SRS-pos的上行传输过程中,不同地理位置的多个发射接收点(TRP,transmit-receive point)需要同时进行波束扫描,以准确探测到该UE发送的SRS-pos并进行测量。由于FR3频段(52.6~71 GHz)的波束宽度更窄且波束数量更多,TRP探测SRS-pos时需要持续地波束切换,导致上行定位过程的时延开销较大。在3GPP RAN1#106e次会议中,Ericsson与Vivo等公司提出,由于UE的波束数量远小于TRP端,考虑让UE执行波束扫描来传输SRS-pos,以减小TRP端探测SRS-pos的时延开销[12]。但由于SRS-pos通常为周期性配置的,UE不仅要等待SRS-pos的传输机会,还需要持续重复传输以便让足够数量的TRP能探测到它,因此定位时延仍无法减小[13]。尤其在终端部署密集的场景中,TRP仍需要进行波束扫描来提升上行覆盖,满足更多终端的定位需求。由此可见,60 GHz上行定位过程中SRS-pos传输与探测的时延问题无法有效缓解。上述时延问题会加剧60 GHz的隐藏节点问题,在长时间的SRS-pos传输与探测过程中,某些SRS-pos的传输链路上有可能出现新的隐藏节点,严重影响终端定位的有效性和可靠性。因此在60 GHz系统亟需设计新的定位信号传输机制,缓解隐藏节点对定位性能的影响。
目前5G NR中定位参考信号的空间关系配置是基于上下行信道互易性的,将上行定位信号QCL关联的参考信号设置为特定的下行参考信号,如CSI-RS/SSB/PRS等,使得UE能直接利用该下行参考信号的接收波束来发送对应的上行定位信号[14]。然而,实际的传输环境并不具有理想的上下行信道互易性,尤其对于60 GHz非授权毫米波频段,由于TRP端的波束数量通常远大于UE侧的波束数量,且TRP侧的波束宽度远远窄于UE侧的波束宽度,造成了严重的上下行波束不对称问题[15]。详细示例如图1所示,TRP的下行波束覆盖范围内没有干扰节点,使得UE测得该下行波束发射的参考信号的质量较好,但对应方向的上行波束的覆盖范围内存在干扰节点,因此不能通过下行参考信号的接收质量来推测对应波束方向的上行信道状况。综上所述,基于下行波束的测量结果来配置上行信号的空间关系的方法在60 GHz频段不适用。

图1 60 GHz上下行波束不对称示例
基于上述问题,需要对60 GHz非授权频段的定位参考信号设置新的空间关系配置方案,基于基站端对上行参考信号的测量结果来配置上行定位信号的QCL关系。此外,还需要考虑实时调整定位信号的QCL关系来规避随时可能出现的隐藏节点,增加定位信号的传输可靠性,提升NR终端在60 GHz的定位精度。
2 系统模型
2.1 定位系统建模
以UTDOA定位机制为例,通过测量UE发送的SRS-pos到附近某两个TRP的时间差,来计算UE到这两个TRP的距离差[16]。若基站间完全同步,核心网的位置管理功能(LMF,location management function)实体依据两个TRP上报的SRS-pos到达时差计算出UE到这两个TRP的距离差,则UE必定位于以这两个TRP为焦点,以其距离差为定差的双曲线上。如图2所示,3个或3个以上的gNB就能形成两条以上的双曲线,这些双曲线的交点就是估计出的UE位置[17]。

图2 TDOA定位机制
第i个gNB/TRP距UE的水平距离被表示如下:
(1)
由于UE的高度相比于基站可以忽略不计,估计UE的水平坐标Xe(xe,ye)如下:
(2)
其中:(x1,y1)、(x2,y2)、(x3,y3)为已知的gNB/TRP的水平坐标位置。将上式以矩阵形式表示如下:
BXe=C
(3)
其中:B、C、Xe被定义如下:
(4)
(5)
(6)
由线性最小二乘法得到UE的位置如下:
(7)
最终定位精度由下式的定位误差(PE,positioning error)进行评估,(xr,yr)为UE的实际位置:
(8)
2.2 定位误差分析
当主基站指示UE激活某周期性配置的SRS-pos资源集时,UE在每个传输周期的固定传输时刻同时朝位于不同地理位置的多个TRP发射SRS-pos信号。由于TRP不知道UE的方位,其在个不同方向的波束上进行扫描以探测该UE发射的SRS-pos。UE到TRP的探测波束之间的传输路损为:
(9)
(10)
(11)
其中:i=[1,…,M],θI为UE与TRP的波束i之间的夹角。α随机分布在[1-10],表示该时刻的信道衰落参数。
设某个传输周期内,TRP测量得到的SRS-pos平均接收信噪比如下:
(12)

设置SNRlimit为TRP能探测到定位信号的最小信噪比,若接收信噪比小于SNRlimit,则TRP认为UE端由于LBT失败未能成功发射SRS-pos,因此在本周期内不进行定位信号的测量。在SNRmax≥SNR≥SNRlimit的情况下,即该SRS-pos能成功发射且信号不失真的前提下,SNR值越小,TRP的测量误差值越大。由于在60 GHz非授权频段中,即使SRS-pos发射前的LBT成功通过,但隐藏节点仍可能干扰SRS-pos的传输链路。以UL-TDOA机制为例,由于gNB/TRP知道每个周期内SRS-pos的发射时刻,根据它们在每个周期内探测到SRS-pos的时间可以得出SRS-pos的传输时间,但隐藏节点会导致TRP探测到SRS-pos的时刻推迟,其上报给LMF的传输时间的误差值变大。TRP测量时差的标准差与信号带宽和信噪比的均方根成反比[18],如下式所示:
(13)
其中:k为一固定的比例常数,B为信号带宽。
由式(1)推出UE距TRPj与TRPi的水平距离差与三维空间距离差的关系如下:
(14)
上式的水平距离差无法精确估计,只能被约束在限定范围内。推算出水平距离差的最大值如下:
(15)
其中:ri,j为TRPi与TRPj之间的水平距离,Δ(dj-di)=c·Δ(tj-ti)。由于TRP测量出的传输时间只可能大于实际传输时间,上式中的di+dj可直接计算为c·(ti+tj)。因此,只要网络侧知道TRP间的空间位置关系和每个TRP的接收SNR值,结合式(13)和式(15)即可成功推算出TRP间水平距离差的最大误差值。
将图2中的空间结构映射到二维平面,如图3所示,菱形区域为最大定位误差所限定的UE位置估计区域,粗线为最大的定位误差。可看出,最大定位误差PEmax、TRPj与TRPi的水平距离差最大误差值Δ(rj-ri)max、TRPj与TRPm的水平距离差的最大误差值Δ(rj-rm)max可抽象为一个封闭三角形的三条边。
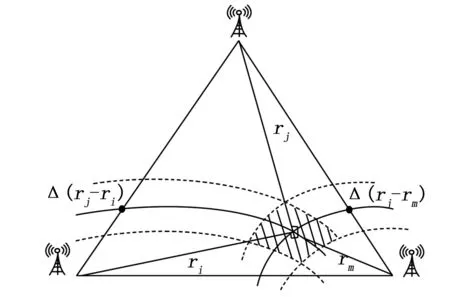
图3 定位误差估计示例
由于网络侧知道TRP间的空间位置关系,因此网络侧也可知TRPj与TRPi、TRPm所形成的水平面夹角α。最大定位误差值PEmax可以被推算为:
Δ(rj-rm)×cos(180°-α)=Δ(rj-ri)2+Δ(rj-rm)2+
2×Δ(rj-ri)×Δ(rj-rm)×cos(α)
(16)
3 定位信号的隐藏节点规避方法
3.1 定位信号的空间关系配置
定位参考信号(PRS/SRS-pos)的相关参数被高层配置为不同的级别类型,包括定位频率层(positioning frequency layer)级别、资源集(PRS/SRS-pos resource set )级别和资源(PRS/SRS-pos resource)级别。其中,定位频率层级别的参数包括3个,分别指示载波间隔、循环前缀和频域位置参考点。资源集级别的参数包含这个资源集的ID、周期、重复因子、时间间隔等,同一资源集内多个资源应具有相同的时域行为,即相同的传输时刻和传输周期。资源级别的高层参数包括该资源的ID、资源映射所需的一些参数和该资源的QCL关系等,因此,同一资源集中的多个资源可以配置为不同的QCL关系。
若两个天线端口具有QCL关系,则认为从其中一个端口获得的信道估计结果可以用于另一个端口。NR相比于LTE,新增了QCL-TypeC和QCL-TypeD两种类型,其中QCL-TypeD用于配置参考信号的空间接收参数,辅助接收端的波束赋型[19]。具体来说,若两个参考信号被配置为QCL-TypeD关联,则接收端可以用同一个波束接收这两个参考信号。现有机制基于UE对多个CSI-RS/SSB的信道状态估计,将质量最佳的CSI-RS/SSB配置为与SRS-pos具有QCL-TypeD关联,使得UE使用接收该CSI-RS/SSB的波束发射SRS-pos。
NR设备的上行定位过程中,UE与服务gNB/TRP之间的信令交互如图4所示。当需要对某UE定位时,网络侧的位置服务器(LMF)向主基站发送位置请求信令,由主基站对UE进行SRS-pos相关参数的配置。配置完成后,LMF向不同地理位置的多个gNB/TRP发送定位激活请求。收到定位激活请求的gNB/TRP以波束扫描的方式同时探测SRS-pos,并将其测量结果反馈给LMF,最终由LMF基于定位算法计算出UE的位置。

图4 SRS-pos传输与探测过程
本文基于60 GHz的信道特性,对原SRS-pos的传输与探测过程进行了改进。如图4中的虚线所示,TRP基于某个SRS-pos传输周期内的测量结果,调整质量较差的SRS-pos资源的空间关系,将其QCLTypeD关联的参考信号调整为测量结果最佳的SRS-pos,使其传输方向避开潜在的隐藏节点。
3.2 定位信号的空间关系调整算法
设某SRS-pos资源集中包含N个SRS-pos资源,其中1≤N≤16,具体N值由服务gNB基于UE的能力进行配置。本算法的应用实体为单个gNB/TRP,其探测到的SRS-pos资源对应UE在限定角度内的多个上行波束。设该固定角度内的SRS-pos资源的数量为K,分别对应相同或不同的上行波束,且1≤K≤[N/3]。在UE传输SRS-pos的同时,每个TRP都应用如下的算法对其能探测到的K个SRS-pos资源进行空间关系调整。
算法1:SRS-pos的空间关系调整算法
初始化:初始化SRS_SNRlimit;
传输周期循环:
1)for l=1,L do:
2)初始化,SRS_SNRmax=SRS_SNRlimit,初始化K维向量bitmap[], 初始化maxId=0;
3)fori=1,Kdo:
4)if SRSi_SNR>SRS_SNRlimit:向bitmap中添加比特值1; if SRSi_SNR>SRS_SNRmax:设置SRS_SNRmax=SRSi_SNR;更新maxId=i;
else:
向bitmap中添加比特值0;
5)end for
6)if 0 not in bitmap:
continue;
elif 0 in bitmap and 1 in bitmap:
更新0对应的SRS-pos resources的准共址参考信号为SRS_SNRmax对应的SRS-pos resource;
elif 1 not in bitmap:
去激活该SRS resource set;
break;
本算法设定SRS-pos传输周期数为L,在每个传输周期内,多个TRP可以同时应用本算法对朝向其传输的K个SRS-pos资源进行测量与空间关系调整。设定一个阈值SRS_SNRlimit,表示能满足终端定位精度的最小接收信噪比。在某个传输周期内,若TRP测量某个SRS-pos资源的接收信噪比不大于SRS_SNRlimit,则在bitmap中标记该SRS资源索引(SRI,SRS resource Id)对应的比特值为0;否则,在bitmap中标记该SRS资源索引(SRI)对应的比特值为1,并且若该SRS的信噪比大于SRS_SNRmax,则对SRS_SNRmax与maxId进行更新。
每个传输周期结束时,TRP的测量结果对应3种情况:
情况1:所有SRS-pos resource的信噪比均大于SRS_SNRlimit:推断UE朝向该TRP的传输链路上不存在隐藏节点,不需要进行空间关系的更新;
情况2:部分SRS-pos resource的信噪比不大于SRS_SNRlimit:推测这些SRS-pos的传输方向上存在隐藏节点,服务gNB通过DCI中的TCI_state字段或MAC-CE中的比特序列指示需要更新的SRS-pos resource,设置它们QCL TypeD关联的参考信号索引为maxId;
情况3:所有SRS-pos resource的信噪比均不大于SRS_SNRlimit:推断朝向TRP发射传输链路受到隐藏节点的严重干扰,本次定位过程失败。该TRP向服务基站报告定位失败信息,服务基站指示UE去激活该SRS-posresource set并由LMF报告定位失败信息与该TRP的标识。之后,LMF可以重新选择TRP并向其发送定位激活请求,同时服务基站指示UE激活其他的SRS-pos资源集,以重新启动定位过程。
4 仿真结果与分析
为了验证本文所提的空间关系调整方法对隐藏节点的规避效果,设计如下仿真评估实验,将本方案应用到UTDOA定位系统模型中,并与传统方法进行对比,分析其对工作于60 GHz频段的定位性能的影响。
仿真评估考虑一个由3个TRP为顶点的封闭三角形区域,如图2所示,其中随机分布N个其他RAT设备,即可能干扰本蜂窝设备的定位信号传输链路。文中参考3GPP国际标准设置仿真参数,设定UE到TRPi,j,m的水平距离分别为ri=40 m,rj=30 m,rm=20 m,TRP高度h均为5米,得出UE到TRPi,j,m的传输距离分别为40.3米、30.4米、20.6米。设TRPj与TRPi和TRPm形成的夹角为60°,即式(12)中α=60°,TRP间的水平距离ri,j=50 m,rj,m=40 m。考虑一个占用1 GHz带宽且周期间隔100 ms的SRS-pos资源集。其他仿真参数如下:

表1 仿真参数设置
使用上述参数进行仿真,得出使用空间关系更新算法和不进行空间关系更新这两种情况下,TRP对SRS-pos到达时间的测量准确度随传输周期的变化如图5所示,其中测量准确度定义为TRP测量得到的SRS-pos传输时间与实际传输时间的绝对差值除以实际传输时间。图6为UL-TDOA定位模型中使用空间关系更新算法和不进行空间关系更新这两种情况下,实际定位误差随传输周期的变化。

图5 SRS-pos测量精度随传输周期的变化图

图6 UL-TDOA定位误差随传输周期的变化图
从图5可知,TRP端的测量准确度随传输时间逐渐增加,且应用本空间关系调整机制使得SRS-pos的测量准确度相比原机制最高提升了27%。此外,随着SRS-pos的传输时间的增加,本算法相比原机制对测量准确度的提升量将进一步增加。图6显示应用空间关系调整机制显著降低了UL-TDOA的定位误差,且相比原机制的误差减小量随传输周期的增加而增加。
综上所述,本文所提出的空间关系调整机制显著提升了上行定位精度,并且随着TRP对SRS-pos测量时间的增加,本机制对定位精度的提升量也越大。考虑到定位过程的时间开销不能太大,实际应用中需要在定位可靠性与定位时延之间进行权衡。
5 结束语
本文提出一种空间关系调整算法来减小60 GHz频段中定位信号的测量误差,使得NR-U设备能充分利用60 GHz的大带宽资源与波束赋型能力实现高精度的定位。以UL-TDOA定位机制为例,基站端基于对多个SRS-pos资源的探测结果实时调整某些SRS-pos关联的QCL TypeD参考信号,使其传输方向绕过可能存在的隐藏节点。下一步可以考虑引入终端的辅助信息来帮助基站端进一步判断定位信号所在的波束质量,并分别对每个定位信号设置合适的发射功率,以适应随机变化的信道状态[20],使每个TRP的探测质量均能达到最佳,在满足定位要求的前提下尽可能节省终端的功耗。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2020年2期)2020-03-26
北京航空航天大学学报(2019年9期)2019-10-26
通信技术(2019年3期)2019-05-31
雷达学报(2017年3期)2018-01-19
电子制作(2017年8期)2017-06-05
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
