基于群体共识的语言直觉模糊三支决策方法①
2022-12-26 13:38:08魏子钦郭鑫滢黄煜琪刘久兵
西南师范大学学报(自然科学版) 2022年12期
魏子钦, 郭鑫滢, 黄煜琪, 刘久兵
1.汕头大学 理学院,广东 汕头 515063;2.汕头大学 商学院,广东 汕头 515063
1990年,加拿大华人学者姚一豫教授[1]基于贝叶斯风险决策理论提出决策粗糙集模型,该模型将经典粗糙集中的等价关系拓展为概率包含关系,使其对数据的处理具有容错能力和敏感性特征,更适合处理代价损失敏感的评估决策问题. 随着决策粗糙集模型的深入研究,三支决策概念[2]便应运而生,它在传统接受决策和拒绝决策的基础上增加了延迟决策,是传统二支决策的拓展[3]. 由于比较符合人类自然语言信息的处理,三支决策近年来引起了国内外学者的广泛关注与研究,并在信息过滤[4]、 冲突分析[5]、 概念学习[6]、 数据聚类[7]、 推荐系统[8]、 频繁模式挖掘[9]、 粒计算[10]、 特征选择[11]和信息系统[12]等领域得到成功应用.
在三支决策理论与方法中,概率阈值对(α,β)的确定是一个非常重要的研究问题. 从已有的文献来看,三支决策概率阈值确定方法大多是基于单个决策者给出的代价损失函数来获得的[2-3,10-15]. 然而,由于单个决策者给出的代价损失函数具有单一性和片面性,且难以反映真实代价问题,而群决策能够集成每个专家的智慧,能更加真实地反映综合代价损失. 近年来群决策环境下概率阈值的确定与三支决策方法的研究引起了学者的关注并取得一些成果. Liang等[16]从信息粒度的角度出发,采用区间值信息粒化的方法刻画群体中专家个体的损失函数矩阵及集成矩阵,提出了一种基于信息粒的三支群决策方法;Sun等[17]在满足最小风险决策规则的基础上,构建具有损失函数为语言信息的决策理论粗糙集模型并提出群决策下的三支决策方法;Zhang等[18]基于最优粒度原则提出具有区间值决策理论粗糙集的三支决策框架并将其推广到群体决策中,进而提出三支群决策方法;Pang等[19]基于多元粒化和三支决策的思想,建立基于区间值直觉不确定语言环境下的多属性群体决策方法;Liu等[20]采用直觉模糊加权平均算子集成不同决策者提供的区间直觉模糊评价信息,获得区间直觉模糊综合损失函数评价结果,基于最优化方法建立一种确定三支决策概率阈值及规则的优化模型;Wang等[21]采用社会网络分析方法研究专家群体观点一致性的实现机制,进而提出了一种序贯三支多属性群决策方法;Liu等[22]采用直觉模糊数相似测度定义了专家群体的一致性指标,设计了基于凸组合的评价更新机制及两步策略下的直觉模糊三支群决策方法;Liang等[23]构建了基于层次社会网络分析的评价调整机制,并采用不一致决策者与领导者之间的最大贴近度来建立实现专家一致性模型,从而获得三支分类规则.
从现有的三支群决策方法可知,大多数研究是从给定专家权重,修改专家评价的角度来考虑的,即采用集成方法来集成不同专家给出的评价信息,从而获得综合损失函数评价结果. 当专家群体一致性指标达不到一致性要求时,通常采用修改个体损失评价信息的策略来提高专家群体的一致性. 但是,这种修改策略通常难以保证算法的收敛性,并且具有一定的主观性[24],而模糊数为处理这种主观性提供了有效的方法[25]. 因此,本研究采用语言直觉模糊数来刻画损失函数,从调整专家权重的视角设计提高专家群体综合损失函数一致性的迭代算法,同时从理论上证明了该算法的收敛性. 采用该算法可获得具有群体共识的综合损失函数. 进而根据单一优化模型的方法建立语言直觉模糊信息下的三支群决策阈值确定模型,并获得三支决策知识.
1 预备知识
1.1 基于决策粗糙集的三支决策模型
决策粗糙集模型由2种状态和3种行动构成[2]. 设状态集X={C,C},表示对象属于C和C两种状态. 行动集记为A={aP,aB,aN},其中aP,aB和aN分别表示对象属于接受决策、 延迟决策和拒绝决策的3种行动,即:x∈POS(C)、x∈BND(C)和x∈NEG(C). 这3种行动在2种状态下对应的损失可采用3×2矩阵表示,具体见表1.

表1 2种状态3种行动下的决策代价损失矩阵
表1中λPP,λBP和λNP表示对象属于状态C时,采取aP,aB和aN3种行动的代价损失. 类似地,当λPN,λBN和λNN表示对象不属于状态C时,分别采取3种行动对应的损失. 设Pr(C|[x])为对象x隶属于状态C的条件概率,对象x通常用等价类[x]表示,则对象x的决策代价损失函数R(a*|[x])(*=P,B,N)的计算公式为:
R(a*|[x])=λ*PPr(C|[x])+λ*NPr(C|[x])
根据贝叶斯最小风险决策理论,可得以下决策规则[2]:
P 当R(aP|[x])≤R(aB|[x])且R(aP|[x])≤R(aN|[x])时,x∈POS(C);
B 当R(aB|[x])≤R(aP|[x])且R(aB|[x])≤R(aN|[x])时,x∈BND(C);
N 当R(aN|[x])≤R(aP|[x])且R(aN|[x])≤R(aB|[x])时,x∈NEG(C).
上述规则P-N称之为三支决策[2-3]. 基于Pr(C|[x])+Pr(C|[x])=1,规则P-N通常考虑如下合理情形:
λPP≤λBP≤λNP
λNN≤λBN≤λPN
进一步可简化为规则P1-N1:
P1 当Pr(C|[x])≥α且Pr(C|[x])≥γ时,x∈POS(C);
B1 当Pr(C|[x])≤α且Pr(C|[x])≥β时,x∈BND(C);
N1 当Pr(C|[x])≤β且Pr(C|[x])≤γ时,x∈NEG(C).
其中α,β和γ可表达为:
其中: 阈值α,β和γ满足0≤α≤1、 0≤β≤1且0≤γ≤1. 此外,从规则B1中可知,阈值α和β存在两种情形: (Ⅰ)α>β和(Ⅱ)α≤β.
(Ⅰ)α>β,满足: (λPN-λBN)(λNP-λBP)>(λBP-λPP)(λBN-λNN)可得α>γ>β,此时规则P1-N1进一步简化为:
P2 当Pr(C|[x])≥α时,x∈POS(C);
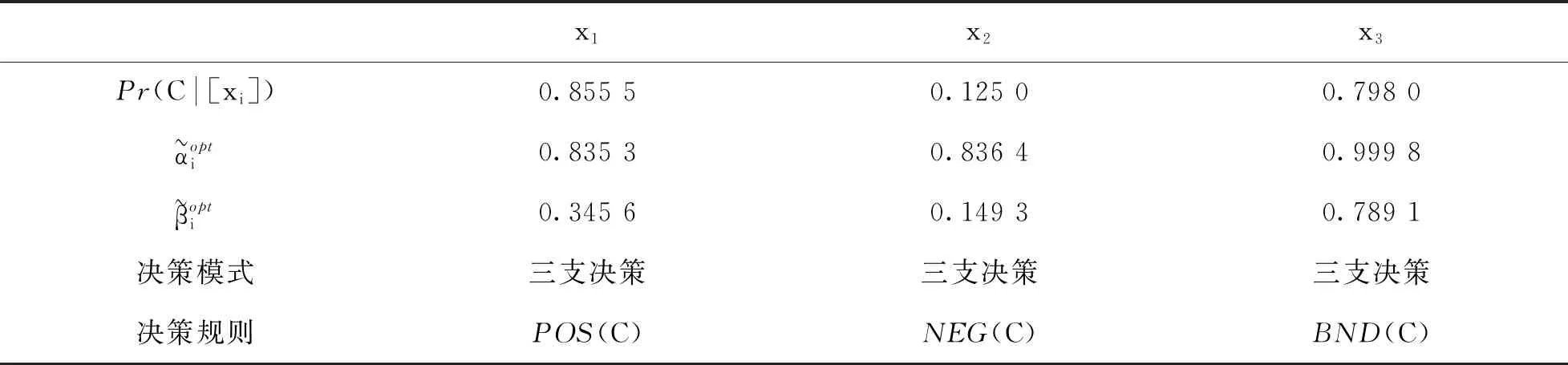
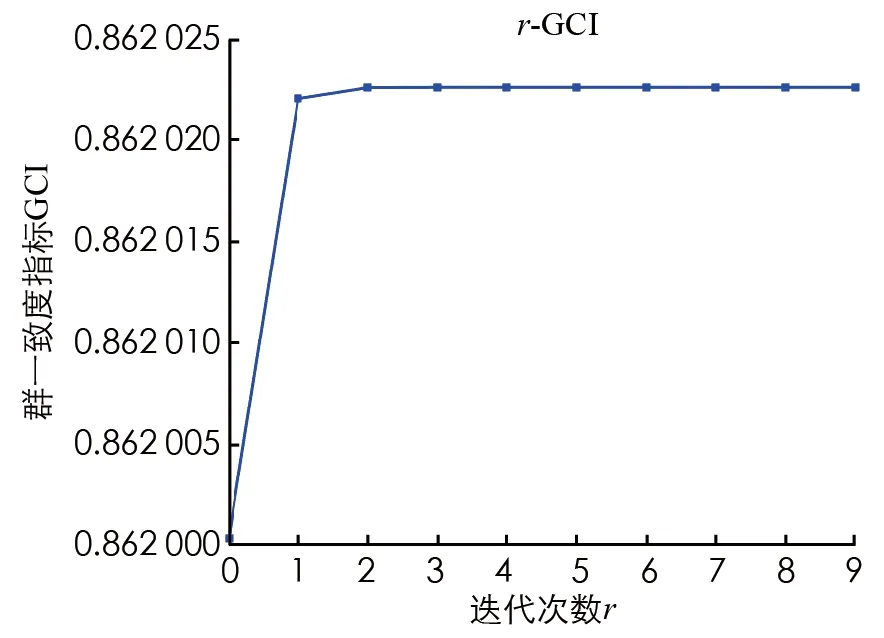
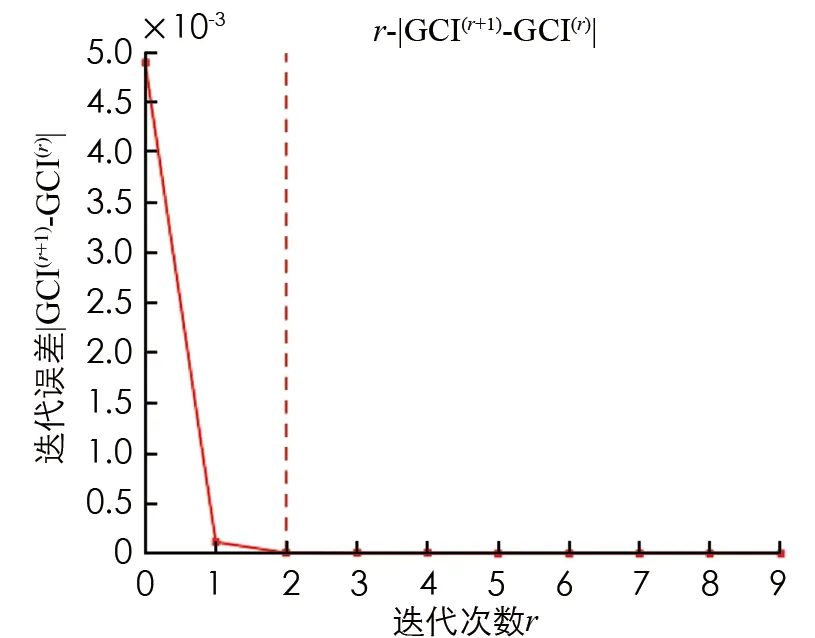
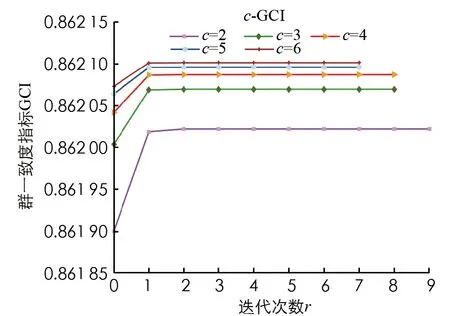
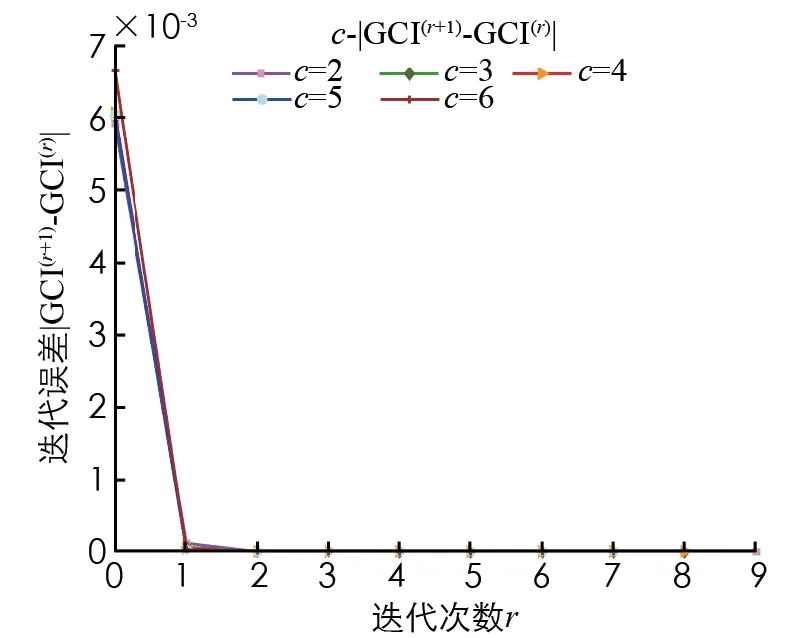
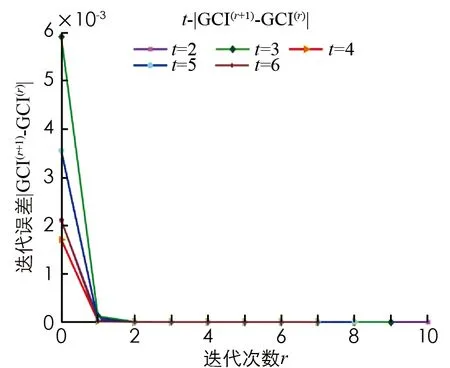
B2 当β N2 当Pr(C|[x])≤β时,x∈NEG(C). (Ⅱ) 当α≤β,满足: (λPN-λBN)(λNP-λBP)>(λBP-λPP)(λBN-λNN). 此时规则P1-N1简化为二支决策如下: P3 如果Pr(C|[x])≥γ,x∈POS(C); N3 如果Pr(C|[x])<γ时,x∈NEG(C). 在介绍语言直觉模糊数之前,首先给出直觉模糊数的定义[26]. 定义1设U={x1,x2,…,xn}为某非空论域. 则U上的直觉模糊集F定义为: F={(x,μF(x),νF(x))|x∈U} 基于直觉模糊数的概念,给出语言直觉模糊数的定义[27]. 考虑到语言直觉模糊数在刻画不确定损失函数方面相比于其他评价更灵活,且更符合人类自然语言的表达. 为此,本研究采用语言直觉模糊数来评价损失函数,进而形成语言直觉模糊三支群决策问题,该问题包括Ω={C,C}≜{P,N}2种状态和A={aP,aB,aN}3种行动. 专家在2种状态∘(∘=P,N)下采取3种行动a*(*=P,B,N)将会产生相应的6种损失:λPP,λBP,λNP,λNN,λBN和λPN. 邀请n(n≥2)位专家针对m个对象分别给出语言直觉模糊损失评价. 设E={e1,e2,…,en}是由n个专家组成的集合,X={x1,x2,…,xm}是由m个对象组成的集合,W=(ω1,ω2,…,ωn)T是专家权重向量,其中且0≤ωk≤1. 为了获得具有群体共识的综合损失函数与三支决策规则,专家需要提供代价损失函数评价值. 实际中,专家们能基于离散语言术语S={s0,s1,…,sg}采用语言直觉模糊数表达他们的偏好. 设专家ek给出的代价损失函数评价值为k=1,2,…,n;i=1,2,…,m;j表示第j个代价损失函数,且j=1,2,…,6. 其中专家ek针对m个对象xi提出的代价损失函数评价值构成专家评价矩阵Ek,其中为: ekλPP(1)λBP(2)λNP(3)λNN(4)λBN(5)λPN(6)Ek=x1x2︙xi︙xmλk11λk21︙λki1︙λkm1 λk12λk22︙λki2︙λkm2λk13λk23︙λki3︙λkm3λk14λk24︙λki4︙λkm4λk15λk25︙λki5︙λkm5λk16λk26︙λki6︙λkm6 为了表达方便,将第k个专家的评价矩阵Ek简记为Ek=(Ek1,Ek2,…,Eki,…,Ekm)T,其中Eki为矩阵Ek中第i个对象对应的6个代价损失函数构成的行向量. 采用最优集成方法将n个专家提供的评价矩阵Ek进行集成,从而获得具有群体共识的综合损失函数评价矩阵E,可表达为: λPP(1)λBP(2)λNP(3)λNN(4)λBN(5)λPN(6)E=x1x2︙xi︙xmλ11λ21︙λi1︙λm1 λ12λ22︙λi2︙λm2λ13λ23︙λi3︙λm3λ14λ24︙λi4︙λm4λ15λ25︙λi5︙λm5λ16λ26︙λi6︙λm6 为了表达方便,专家综合评价矩阵E可类似地表达为E=(E1,E2,…,Ei,…,Em)T,其中Ei为矩阵E中第i个对象对应的6个代价损失函数构成的行向量. 根据上述问题和表达方式,下面给出语言直觉模糊相似测度,并采用该测度来度量专家个体给出的语言直觉模糊评价矩阵Ek与群体综合评价矩阵E之间的相似性,进而构建群体一致度指标,且采用该指标度量群体的综合一致性水平,进而建立基于语言直觉模糊相似度的最优集成模型. 根据海明距离,首先给出语言直觉模糊损失函数距离的定义. 定义3设Eki为第k(k=1,2,…,n)个专家关于第i(i=1,2,…,m)个对象的6个代价损失函数构成的行向量,Ei为n个专家对第i个对象的6个综合代价损失函数构成的行向量,则Eki与Ei之间的距离测度定义为: 其中f为语言术语集S={s0,s1,…,sg}到实数集R之间的映射. 为了计算方便,假设映射f为f(su)=u/g,f(sv)=v/g. 定义4设Ek为第k(k=1,2,…,n)个专家ek给出的语言直觉模糊评价矩阵,E为群体综合评价矩阵. 则Ek与E之间的相似测度S(Ek,E)定义为: 基于定义4,构建群体一致度指标GCI. 定义5设S(Ek,E)为专家ek给出的语言直觉模糊评价矩阵Ek和群体综合评价矩阵E之间的相似测度,则由n个专家构成的群体一致度指标GCI定义为: 根据Lee[28]的研究成果,建立基于第k个专家给出的语言直觉模糊评价矩阵Ek与群体综合评价矩阵E之间非相似度最小的最优集成模型. 具体为: (1) 其中t>1为整数且c>1是常数. 根据模型(1), 可得命题1[28]. 命题1当专家权重ωk(k=1,2,…,n)和群体综合评价矩阵E满足下列关系时,模型(1)达到局部最小值. 基于命题1,设计一种实现语言直觉模糊综合损失函数一致性的迭代算法,并证明该算法的收敛性. 分析仪表是电厂锅炉给水、机组循环汽水生产过程中重要的设备,是监测机组循环汽水的水质和水处理系统设备运行状态的离子定量分析仪表。锅炉给水及机组循环汽水的水质会直接影响锅炉、汽轮机的安全运行,也会影响火力发电厂的经济和社会效益,因此电厂越来越重视锅炉给水及机组循环汽水分析仪表。 算法1: 基于最优集成模型的综合损失函数一致性实现算法 输入: 专家ek的个体评价矩阵Ek(k=1,2,…,n) 输出: 具有群体共识的综合损失函数矩阵E W(0)=W, r=0, whiler≥0 if |GCI(r+1)-GCI(r)|≤ε 输出E(r+1) Break else r=r+1 end end ReturnE(r+1) 为了证明上述算法的收敛性,首先给出命题2. 命题2设f(x)是可导函数且f′(x)在闭区间[c,d]上有界. 则f(x)在[c,d]上是一致连续的,即对于任意x,y∈[c,d]满足|x-y|<ε,则|f(x)-f(y)|<ε′,其中ε和ε′均为无穷小量,ε>0且ε′>0. 证因为f(x)是可导函数,f′(x)在闭区间[c,d]上有界,即存在一个极大的M>0,使得|f′(x)|≤M,并且对于任意x,y∈[a,b]满足|x-y|<ε,则可以得到|f(x)-f(y)|=|f′(ξ)||x-y| 根据命题2,可进一步得到命题3. 证对于任意k=1,2,…,n,满足|xk-yk|<ε,恒有: 根据命题3,可得命题4. 证 根据命题4,容易得到命题5. 证 当算法1的迭代终止条件|GCI(r+1)-GCI(r)|<ε替换为‖W(r+1)-W(r)‖<ε时,该算法可以退化成文献[29]中的算法;而该文献验证了算法的收敛性,并结合命题5可知,上述基于权重迭代的一致性综合损失函数获取算法算法1是收敛的. 因此,采用算法1能获得一致性综合损失函数矩阵E. 为了方便后续讨论,记E为如下: E=(E1,E2,…,Ei,…,Em)T (2) 根据Liu等[15]提出的语言直觉模糊三支决策阈值确定模型,下面建立确定语言直觉模糊三支群决策阈值的单一优化模型且首先给出下面命题. 根据贝叶斯风险决策理论,获得三支决策规则: 规则P4-N4会涉及到语言直觉模糊排序方法,因此,采用文献[15]中的排序方法对其进行排序. 首先给出命题7[15]. (3) 具体可化为: 其中: 下面给出基于语言直觉模糊数评价的三支群决策方法,具体步骤如下: 步骤3: 基于一致性综合损失函数,建立确定语言直觉模糊三支群决策阈值的单一优化模型. i) 当αi>βi,采用三支决策规则,即: P6 若Pr(C|[xi])≥αi时,xi∈POS(C); B6 当βi N6 当Pr(C|[xi])≤βi时,xi∈NEG(C). ii) 当αi≤βi,采用二支决策规则,即: P7 如果Pr(C|[xi])≥αi,xi∈POS(C); N7 如果Pr(C|[xi])<βi,xi∈NEG(C). 假设某投资人面对3个投资项目X={x1,x2,x3},现考虑是否投资发展,这些项目根据以往经验分为盈利的项目(C)和亏损的项目(C). 投资人根据上述项目可以选择投资(aP)、 进一步考虑(aB)和不投资(aN)3种决策行动. 为了获得巨大的经济效益,投资人聘请了3位投资学专家来做出科学合理的决策. 设上述3个项目就每个项目选择投资、 进一步考虑以及不投资行动后的代价损失函数由专家基于标度S={s0,s1,s2,s3,s4,s5,s6}给出,具体结果详见表2-表4. 基于以上信息,投资人将如何做出投资决策?假定3个投资项目xi(i=1,2,3)对应的条件概率分别为Pr(C|[x1])=0.855 5,Pr(C|[x2])=0.125 0和Pr(C|[x3])=0.798 0. 表2 专家e1提供的6个损失函数的评价结果 表3 专家e2提供的6个损失函数的评价结果 表4 专家e3提供的6个损失函数的评价结果 步骤2: 给定误差值ε=10-15,并设置参数r=0,t=3,c=2,采用算法1来获取满足一致性综合代价损失函数矩阵(表5). 表5 一致性综合代价损失函数 步骤4: 采用MATLAB求解该模型,并得到三支决策阈值对最优解(表6). 表6 基于本研究方法获得的三支决策概率阈值和三支决策规则 从上述算例的决策步骤可知,本研究提出的三支群决策方法主要由两个决策过程构成: 第1个决策过程是采用算法1来获取满足一致度指标的综合代价损失函数矩阵E;第2个决策过程是建立确定语言直觉模糊三支群决策阈值的单一优化模型. 显然,采用第2个决策过程可以有效地确定一致性阈值(表6). 下面主要讨论第1个决策过程中群一致度指标和迭代误差随迭代次数的变化趋势(图1和图2). 在此基础上,探究参数c和t对迭代结果的影响(图3-图6). 首先,由图1和图2可知,当迭代次数达到第2次时,群一致度指标几乎趋于稳定且收敛到较高的一致性水平,此时迭代误差趋近于零. 因此,算法1的计算效率较高且收敛速度较快. 图1 GCI关于迭代次数的变化曲线 图2 迭代误差关于迭代次数的变化曲线 其次,从图3和图4可知: 当参数t相同时,改变参数c,对迭代次数和群一致度指标值产生微小的影响,而对迭代误差值几乎没有影响. 另外,迭代次数随着参数c的增大呈现减小的趋势;当算法1的迭代误差达到10-15时,群一致度指标值会随着参数c的增大呈现增大的趋势. 例如,当参数c=6,算法1在第7次迭代停止时,群一致度指标值达到最大. 图3 GCI关于参数c的变化曲线 图4 迭代误差关于参数c的变化曲线 最后,图5和图6可得类似的结论: 当参数c相同时,迭代次数随着参数t的增大呈现减小的趋势;且当算法1的迭代误差达到10-15时,群一致度指标值会随着参数t的增大呈现增大的趋势. 图5 GCI关于参数t的变化曲线 图6 迭代误差关于参数t的变化曲线 总而言之,从图1-图6可得,采用算法1得到的迭代结果具有一定的稳定性和准确性. 为了突出本研究提出方法的有效性和优势,本研究将所提出的方法与基于决策粗糙集的三支决策方法[2]进行比较分析(图7). 在算例中条件概率分别为Pr(C|[x1])=0.855 5,Pr(C|[x2])=0.125 0,Pr(C|[x3])=0.798 0的前提下,采用本研究提出的方法与文献[2]的方法所获得的三支决策结果是完全一致的. a. Pr(C|xi)=0.855 5 本研究针对基于语言直觉模糊数评价损失函数的三支群决策问题,提出了具有群体共识的语言直觉模糊三支决策方法. 该方法采用语言直觉模糊数刻画损失函数,并构造出专家个体评价矩阵,进而定义了语言直觉模糊相似测度及群体一致性指标. 其次,本研究设计了基于语言直觉模糊相似度的最优集成模型和基于权重迭代的一致性综合损失函数获取算法,并证明了该算法的收敛性. 基于该算法,获得一致性群体综合评价矩阵,并建立了语言直觉模糊三支群决策阈值的单一优化模型. 最后,采用投资策略的算例说明了所提出方法的有效性.1.2 语言直觉模糊数


2 基于群体共识的语言直觉模糊三支决策方法
2.1 语言直觉模糊三支群决策问题描述

2.2 基于语言直觉模糊相似度的最优集成模型
2.3 基于最优集成模型的综合损失函数一致性实现算法及收敛性证明










2.4 基于一致性综合损失函数的三支决策阈值确定模型














3 基于语言直觉模糊数评价的三支群决策方法


4 算例和仿真实验









5 总结
猜你喜欢
公民与法治(2022年5期)2022-07-29 00:47:28江西教育·职教版(2022年9期)2022-04-29 00:44:03河北理科教学研究(2021年3期)2022-01-18 05:34:32教学考试(高考物理)(2021年5期)2021-11-08 10:31:22中医眼耳鼻喉杂志(2021年1期)2021-07-22 07:38:14数学小灵通·3-4年级(2021年5期)2021-07-16 07:46:32海峡姐妹(2020年7期)2020-08-13 07:49:22新世纪智能(数学备考)(2020年12期)2020-03-29 02:15:28今日农业(2019年15期)2019-01-03 12:11:33潍坊学院学报(2016年2期)2016-12-01 13:00:08