基于STM32的城市消防车监测及智能调度系统*
2022-12-23 02:25:44鲍颢之哈欣怡王艺瑾封晓同
微处理机 2022年6期
马 凯,鲍颢之,哈欣怡,王艺瑾,封晓同
(南京林业大学汽车与交通工程学院,南京 210037)
1 引言
据国家统计局提供的数据显示,到2020年为止中国总人口数已达到约14亿1178万;其中,城市人口占比约为63.89%。大量人口密集聚居于城区,存在各种安全隐患。城市消防车作为城市消防灾难发生后第一出动的消防救援车辆,其综合消防救援能力远高于普通罐类消防车[1]。城市消防车结构各不相同,加以城市道路状况复杂多变,其车辆信息监测及道路交通调度管理系统往往无法满足实际需求。本研究基于STM32芯片,设计一款城市消防车监测及智能调度系统,集信息监测、交互以及协调管理为一体,以发挥集成化的特点[2]。系统基于STM32系列单片机监测、收集实时信息,结合CAN通信技术、北斗定位模块等硬件模块将上位机系统与城市消防救援车有机的结合在一起。在紧急出警的背景下,系统对安全影响因素数据化,通过影响因子参数进行分析。如遇路况及车辆紧急情况,可及时预警和处理,并能够及时规避因救援车辆或交通路况未知变化而产生的风险,有效提高救援效率。
2 系统整体设计
系统的整体设计如图1所示,其核心为STM32处理器。通过综合传感器等硬件设备实时采集车辆速度、胎压、油量、水箱余量等参数,将收集到的数据通过CAN通信模块实时上传到上位机管理员系统中,以实现对车辆信息的实时监测。
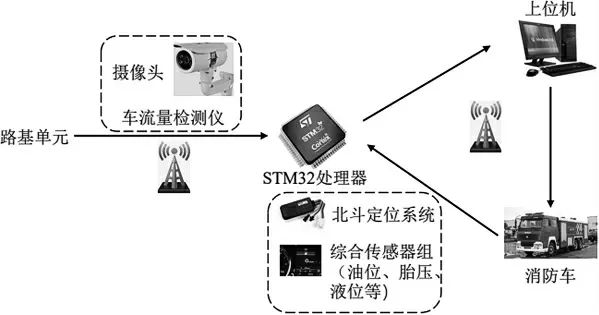
图1 系统设计原理图
通过摄像头等硬件模块采集实时路况,由管理员(即调度中心)及时接收并分析、处理这些实时信息,可对指定的城市消防车发出指令,最终实现信息的远程交互,完成城市主战消防车信息监测[3]。
3 硬件电路设计
硬件模块包括:供电模块、主处理器模块、北斗定位模块[4]、CAN通信模块、综合传感器模块等。主处理器模块是整个系统的核心。其他模块由供电模块进行供电,同时与处理器串口相连接。
3.1 供电模块
在整体系统中,为STM32芯片供电的电压为2~3.6V;CAN通信模块供电电压为3.3~5V;北斗定位模块、综合传感器模块等外设的供电电压均为5.0V。供电模块电路如图2所示。为保证主处理器运行稳定,采用LM1117-3.3稳压芯片[5]对控制电源进行稳压调节,通过芯片控制保证输出电压稳定在正常工作所需的3.3V。
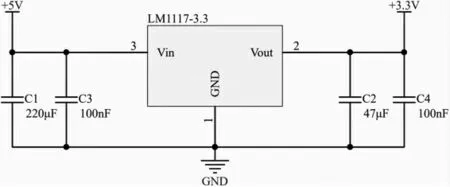
图2 供电模块电路
图中,C2、C4为分别为输出滤波电容,在一定程度上起到抑制自激振荡和稳定输出电压的作用。C1、C3为输入电容,在一定程度上能够防止断电后发生电压倒置。供电模块设计简单,功能可靠,保证输出的电压稳定,满足系统工作需求。
3.2 处理器模块
STM32嵌入式单片机处理器内核具有高性能特点,且计算能力强、功耗低。设计中选用的具体型号为STM32F103ZET6[6],电路如图3所示。该处理器片上外设丰富,支持多种外围设备,满足系统工作需求的同时,也为后期的迭代升级提供了预备资源。芯片内置有2个DMA控制器,12个DMA通道,112个快速I/O端口,能够快速接收道路、出警等信息并加以分析、计算,制定出合适的调度方案[7]。
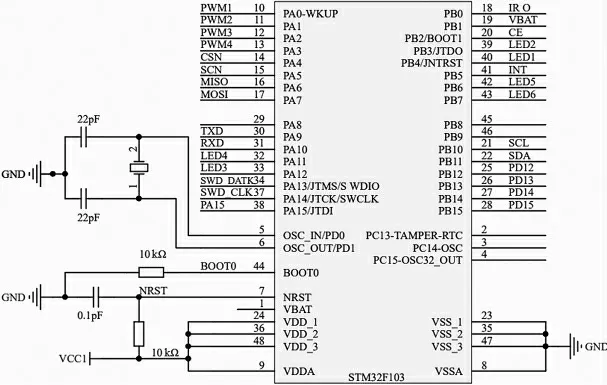
图3 处理器模块
3.3 北斗定位模块
系统采用北斗定位模块实现定位功能,电路如图4所示。模块中选用UV-BDMK01,它是具有高灵敏度的BDS/GPS双模接收机芯片,支持GPS和BDS的单系统定位和双系统联合定位[8],能量消耗低,且其中有32个跟踪通道,可保证同时接收到所有BDS和GPS可见卫星,能够满足专业定位的需求。采用该模块可以准确及时地获取城市消防车辆的实时位置信息。
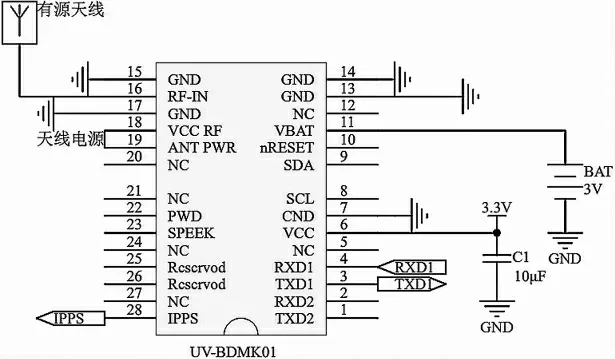
图4 北斗定位模块
3.4 CAN通信模块
系统采用CAN通信[9]作为系统通信方式,电路如图5所示。该模块基于STM32F103ZET6芯片,在一定程度上减少系统内部噪音,简化了外围电路。另一方面,CAN总线采用非破坏性总线仲裁机制,因此即使在多负载情况下也不会导致网络瘫痪[10],使系统具有很强的抗干扰能力。CAN通信电路采用TJA1050,该芯片结构简单,能很好满足系统需求。
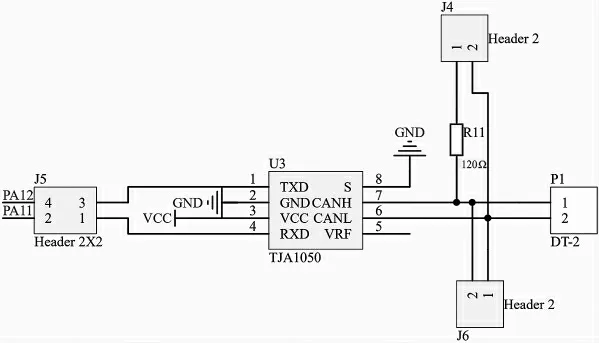
图5 CAN通信模块电路
3.5 综合传感器模块
设计采用以CDW01T为核心的液位传感器模块[11]和以英飞凌SP37芯片为核心的压力传感器模块[12],共同组成一个综合传感器模块。
CDW01T是一款用于液位检测的专用集成电路。基于电容感应的检测原理,借助于集成电子的独特算法实现智能识别。在有无液体上电的状态下,都能准确指示液位状态,因此对于不直接接触液体和需要直接接触液体的检测装置同样适用。在要求非接触式检测的情况下,更能体现出安全与便利的优点。如图6所示为以CDW01T为核心的液位传感器的应用电路设计图。

图6 液位传感器应用电路
胎压传感器模块使用以英飞凌SP37压力监测芯片为核心的电路模块。SP37是高度集成化的芯片,可以精确测量100~900kPa的胎内大气压强,且功耗较低,在恶劣环境中也有很高的可靠度。胎压传感器的具体应用电路设计如图7所示。
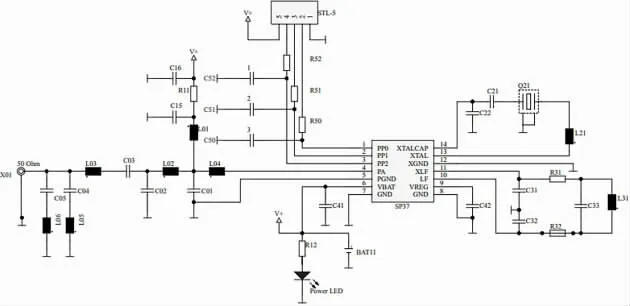
图7 胎压传感器应用电路
4 软件及算法设计
软件部分的设计选用Visual Basic6.0来搭建完成。本城市主战消防车信息监测及智能调度管理系统的主界面如图8所示。其功能包括:查询路线、供水点监测、车辆信息、车辆调度、交通动态[13]、个性设置、历史信息、退出系统。通过对软件的使用,可在上位机系统实现城市消防车的智能调度和供水点的维护提示等功能。

图8 系统主界面
软件功能流程图如图9所示。软件的核心功能在于城市消防车的信息监测和智能调度。主处理器通过获取的车辆运行信息及道路信息进行分析,通过基于优先级的淘汰算法[14]进行分析,最终确定消防车道路规划方案,对相应的消防车发出指令。
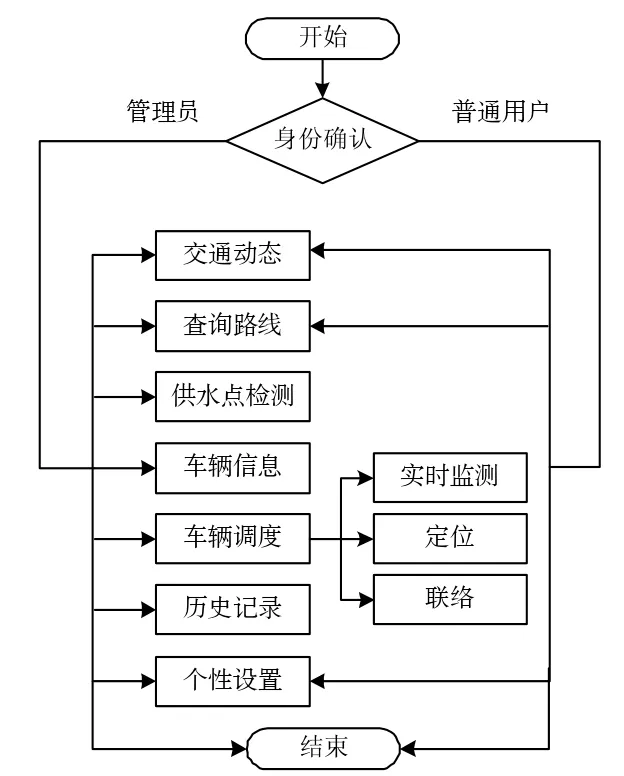
图9 系统功能流程图
为便于管理,软件设置有权限区分功能。用户(即消防车辆)仅能查看软件界面信息并进行调度工作;管理员(即调度中心)额外具备供水点监测、车辆信息、车辆调度[15]以及历史记录查询等权限。如遇特殊情况,须经由管理员审核确定方可进行操作。这一设置防止了管理员在进行车辆调度时被用户的子系统干扰,以至于无法及时准确地获取到达救援现场的最优路径。
系统查询路线功能的界面如图10所示。在这一界面中,可通过地图显示查询的路线,并通过大数据处理,寻找到从消防救援中心到救援目的地之间的最优路线。

图10 查询路线界面
管理员选择距离救援现场最近的消防救援中心并输入救援目的地后,系统会通过大数据平台提供信息进行分析,然后向管理员提供多条优化路线方案。以南京市玄武区消防大队到南京林业大学为例,管理员在输入出发地与目的地后,点击生成路线,在系统提供的路线中再进行筛选,路线筛选后管理员可通过CAN通信将路线共享给指定的城市消防救援车辆[16]。
如图11所示为车辆信息界面。管理员可在车辆信息界面中查看某一出勤中的消防救援车辆的具体信息。通过水箱的剩余水量[17]、油箱的剩余油量、行驶时的车轮胎压、当前车速以及发动机温度等参数,管理员还能够实时地监管车辆的行驶状况以及对完成对该车辆的救援能力的评估。
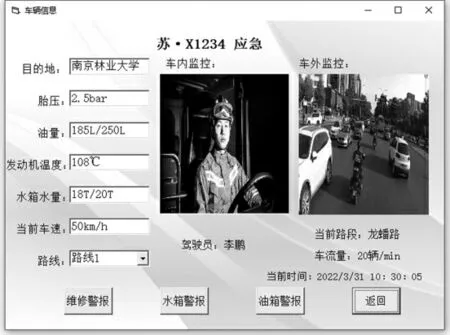
图11 车辆信息界面
车辆行驶参数先由车载硬件传感器模块测得,再通过系统CAN通信模块等进行实时数据传输,有很强的可靠性。当监测数据显示异常时,管理员会根据显示出的异常情况发出不同的警报提醒,如维修指令、加油指令或补水指令,提前做好消防车辆的维修保养以及储备救援物资补给,大大提高消防救援能力和效率,确保救援过程顺利实施。系统还装备有车载摄像头,分别位于驾驶室内与车辆顶部,用于监测驾驶室内驾驶员的驾驶状况及车外道路情况[18]。
如图12所示为车辆调度界面。管理员通过选定区域,可在界面左侧看到城市消防救援车信息。在其中可通过选择救援车种类,得出属于该救援中心的救援车的总量以及出勤、闲置和维修情况。同时,管理员可在界面右侧查看相应车辆信息,通过北斗定位等技术确定该车辆位置、周边环境以及行驶轨迹。通过CAN通信模块,管理员能及时与车辆中救援人员进行通话,这将显著提高城市消防救援车管理的规范性及高效性。
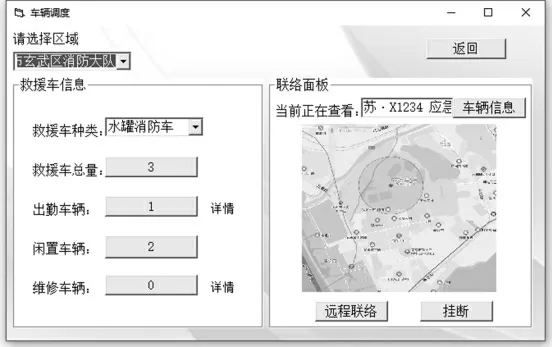
图12 车辆调度界面
5 结束语
所设计系统以STM32处理器为核心,通过北斗定位模块及综合传感器模块实时采集信息,由CAN模块向上位机实时传输信息,使管理员能够与城市消防救援车辆实现无缝对接。系统硬件与软件相互配合,可灵活地应对消防救援过程中出现的各种紧急情况,满足城市消防救援车调度要求。本系统功能齐全,操纵性强,能够合理调度、统筹管理消防资源,有广阔的应用前景。
猜你喜欢
哈哈画报(2022年5期)2022-07-11 05:57:52
儿童时代·快乐苗苗(2022年2期)2022-04-19 12:50:10
少先队活动(2020年8期)2020-12-18 02:32:07
少先队活动(2020年7期)2020-12-18 01:48:39
小天使·一年级语数英综合(2020年4期)2020-12-16 02:56:32
学生天地(2020年1期)2020-08-25 09:01:44
故事作文·高年级(2020年2期)2020-02-24 06:57:46
少年漫画(艺术创想)(2019年11期)2019-04-20 06:46:46
水上消防(2018年4期)2018-09-18 01:49:42
小朋友·快乐手工(2016年11期)2017-01-21 21:20:21