基于数字相控阵雷达的同步技术设计
2022-12-22 07:36林立新
电视技术 2022年11期
林立新
(福建金石电子有限公司,福建 福州 350001)
0 引 言
近海沿岸手机相控阵监控系统可实现对重点怀疑对象、犯罪嫌疑人的连续性跟踪和间断监控,通过跟踪和监控分析、预判其动向、行动轨迹的目的。该系统首先由伪基站吸附覆盖区域手机,其次通过相控阵雷达测向设备侦测被吸附目标手机的位置数据,最后通过数学建模以及后台软件测算出目标所在的GPS位置、距离、方位、时间等数据,为其动向、行动轨迹的分析提供帮助。
该系统的核心为相控阵测向技术,采用相控阵空间位置扫描技术即相控阵雷达技术,通过雷达前端的相控阵天线和后端的数字分析电路完成对手机来波方向的测定。首先通过LTE协议的解析将目标手机从同频不同物理小区标识(Physical Cell Identifier,PCI)或同频同PCI(模3相等)的多用户混合信号中剥离出来,生成干净无损的信号供波达方向(Direction of Arrival,DOA)测向,然后通过相控阵测定技术分析给定手机信号,分析无线电信号在空间的多径传播路线。利用相控阵电路测量手机信号的多个传播路径(最多32条),并结合自定义的多径分析算法,精准挑选出主径并确定该国际移动用户识别码(International Mobile Subscriber Identity,IMSI)的DOA角度。
由于相控阵雷达测向技术为该系统的核心,因此,保证相控阵雷达的空间扫描性能具有重要意义。本文通过对雷达系统进行研究,确定超宽带数字相控阵雷达技术中影响同步的因素,并从转换器的同步设计出发,在设定优化、同步性能要求的基础上,提出时间同步设计方案,对数字相控阵雷达进行设计,并验证设计效果。通过此次设计,为数字相控阵雷达的同步设计提供帮助和借鉴。
1 雷达系统研究
按照天线的扫描方式划分,基础雷达可分为机械扫描雷达和相控阵雷达两种。相控阵雷达中的相指的是相位差,控指的是相位差的控制,而阵指的是天线阵面由多个独立发射-接收单元组成,通过控制每个独立单元的相位差,进而改变整个天线阵面的方向图,实现波束形成和扫描。对比机械扫描雷达,相控阵雷达的扫描速度较快,且抗干扰能力更强,可靠性更高。随着数字化技术的发展,在相控阵雷达的基础上,通过数字阵列的集成,逐渐优化、演变出数字相控阵雷达。数字相控阵雷达可以提高波束赋性的灵活性,并且具有多域抗干扰的能力,能够对多面标进行探测[1]。
本系统采用的数字相控雷达技术为超宽带数字相控阵雷达技术。超宽带数字相控阵是指集成超宽带数字射频前端阵列的相控阵雷达,是目前最为先进的相控阵雷达技术。其中,超宽带数字射频前端是指使用了超宽带数字采样技术的射频收发前端,并且使用数字信道化、数字脉冲压缩等算法,提高目标分辨率、目标识别能力及多目标能力等。同时,可实现软件化,根据指令改变工作模式以适应不同需求。
该系统采用的超宽带数字相控阵雷达技术中,雷达前端测向单元采用超宽带数字射频技术,利用超宽带射频前端组成天线阵面,在天线阵面指向被测物时通过数字波束形成(Digital Beam Forming,DBF)技术完成扫描工作[2],通过波束赋性获得不同使用要求下期盼的信号辐射模式。因此,相控阵雷达的性能基于DBF技术性能,而DBF技术性能与阵面同步效果有关,雷达天线阵因子如式(1)所示:

式中:M,N为天线阵面各方向辐射单元数量;x,y为天线轴平面方向,Tx,Ty为天线平面轴方向,x,y方向单元之间的时间差;Txs,Tys为天线扫描方向,xs,ys方向单元之间的时间差;|Amm|为天线单元辐射强度。
由式(1)可知,当天线阵面各单元不同步,会导致在天线轴平面方向、天线扫描方向的单元之间的时间差存在随机误差。而随机误差的存在会导致方向图失真,进而影响雷达性能。因此,如何保证超宽带数字相控阵雷达的同步,是目前主要的研究方向。而在超宽带数字射频技术的使用中,射频前端的转换器工作时需进行大量、高频率的采样,因此,通过转换器的同步设计,可实现射频前端的同步,保证超宽带数字相控阵雷达的同步功能。
2 总体设计
2.1 同步性能要求
由上述表述可知,超宽带数字射频前端会存在随机误差,该误差是由于数字器件在环境的影响如电磁影响、物理环境影响下,运行时会产生时序亚稳态,在该状态下会产生一定的随机数字误差时延,而对该误差影响较大的因素有运行时的数模转换,以及在数模转换时对数字进行处理时发生的时钟抖动、同步信号的建立和保持时间。因此,为消除超宽带数字射频前端的随机数字误差时延,本文提出并设计了一种新型的时间同步方案,通过时间同步方案保证同步的性能。因此,在进行设计时,需对同步时产生的误差影响进行分析。
此次设计以常见的主瓣-3 dB波束宽度作为优化目标,首先需要确定相位误差对于-3 dB波束宽度的影响,因此需根据式(1)进行建模处理。通过仿真实验,获得随机误差增加时的方向图,根据方向图获取-3 dB波束宽度,通过对相位随机误差进行调整,根据方向图的变化情况,获取-3 dB波束宽度随相位随机误差改变的情况。以8单元线阵为例,对其进行仿真实验,得到的-3 dB波束宽度随相位随机误差改变情况如图1所示。

图1 波束宽度随相位随机误差改变图
由图1可知,当相位误差超过9°,-3 dB波束宽度会显著增加,-3 dB波束的形状发生剧烈的变化,进而导致方向图失真。而在本次设计中,信号中频频率为370 MHz,在相位误差为9°时,所对应的时延误差均值为25.8 ps,因此在设计时,对同步性能进行优化后,应优于25.8 ps的误差均值。
2.2 总体框架设计
本次雷达的总体组成方式如图2所示。天线阵面采用瓦片式数字子阵。该子阵通过将雷达的阵列前端模块化、数字化,在进行组阵时能够实现载体和阵列共形、相适,具有加高的灵活性。并且由于其模块化的设计方式,在前期安装与测试、后期维修与更换时较为便利。整体包含32个天线单元,4个收发(Transmitter and Receiver,TR)组件、1个变频组件以及1个数字处理单元。运行时,阵面结构中的32个子阵会通过其含有的超宽带射频数字前端,对射频信号进行数字化处理,从而获得32路基带信号,通过同步分配网络将信号收集端与处理端向量同步。基带通过同步分配网络输送至数据储存模块完成数据的储存,并通过波束形成单元将数据信号形成数字波束,然后将得到的多波束信号输送至雷达处理机进行信号检测、跟踪等处理。显示控制中心作为指令输入端以及结果显示端。

图2 雷达整体框架
3 时间同步系统设计及关键技术
为实现超宽带数字射频前端的同步,需降低前端之间的相位误差。而降低相位误差则需要保证工作时钟和同步信号在不同的射频前端同时到达[3],因此需在保证同步信号能够稳定地被工作时钟采样的基础上,让同步信号、工作时钟对于雷达回波起始点、发射波形的起始点一同定义,实现不同的射频前端间初相的对准。因此对于数字子阵的同步分配结构进行设计,设计的同步分配拓扑结构如图3所示。其工作流程如下。
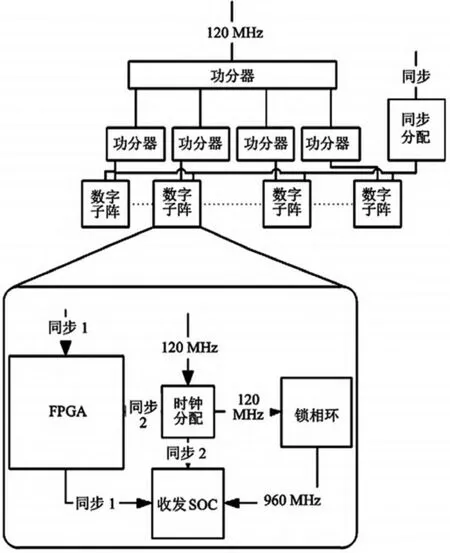
图3 拓扑结构
获取基准时钟和同步信号后,由功分器进行分配。功分器采用树形结构,可使信号均匀分配至数字子阵,且能够保证信号的一致性。当信号进入数字子阵内部,由分布式零延时锁相环系统提供工作时钟。由于基准时钟是同步分频的起始,则需保证工作时钟与基准时钟的相位一致,并监控基准时钟、工作时钟的相位关系。当出现不一致的情况时,需主动进行调整。
3.1 分布式零延时锁相环系统
为满足超宽数字射频前端的工作时钟的要求,本次设计采用分布式零延时锁相环系统,其中零延时锁相环是在传统的锁相环技术上发展优化而来。锁相环是一种频率控制系统,零延时锁相环[4]在结构上进行了改变,通过多级同步分频器结构,对压控振荡器的输出时钟信号进行逐级同步,同步后产生的频率再通过零延时分频器进行输出,通过的过程中不会产生自由分频现象,进而降低了延时的不确定性。在此基础上,还可对延时在ps量级进行调整。分布式指的是锁相环的布置方式,在每个射频前端中均集成零延时锁相环,从而获取分布式的频综系统。分布式的结构对比单独的锁相环,在满足同步能力要求的基础上,可通过多通道的方式降低相噪。
3.2 时间数字转换器
由3.1节所述可知,自由分频现象会提高延时的不确定性,进而导致误差,因此在系统运行时需避免自由分频误差的出现,则需要对同步信号进行实时的监控,保证同步信号的建立保持时间,因此此次设计引入具有时间数字转换器(Time Digtal Converter,TDC)反馈的机制,进而实现提高时序收敛的效果,提高系统的冗余度、可调试性[5]。TDC主要由1条延时链和多个采样模块组成,其主要作用是对时序之间的延迟量进行测量和数字化表示。通过TDC的反馈,可以获取同步信号建立保持时间的偏移量,根据偏移量提供的数据支撑,实现对于同步信号的调节。调节其时延,保证采样的稳定性,避免自由分频现象的产生。
4 应用效果分析
为验证同步设计的效果,需对同步性能进行计算,对信号采样的稳定性进行评估。进行同步性能计算时,可通过计算子阵间的延迟抖动T来表示。子阵间延时抖动T由两部分组成,分别是自由分频的误差Td和分配路径在传播时产生的抖动误差TP,表示如下:

在雷达系统中,工作时钟为960 MHz,由式(2)可知,存在自由分频的误差Td最小为1 ns,此时本系统的数字前端对应的相位误差超过120°,超过了指标要求,因此需保证避免出现自由分频现象,此时子阵间延时与分配路径在传播时产生的抖动误差TP相等,约为20 ps,小于9°时25.8 ps误差均值要求,性能能够满足设计的性能要求。
当时钟树完成逐级分配后,利用960 MHz的工作时钟对同步信号进行采样,同步采样器的建立保持时间约为30 ps。利用采样结果,定义转换输出波形的初始时刻。根据相应的指标可知,120 MHz的同步信号,其偏斜为57 ps,对于960 MHz的同步信号,其偏斜为62 ps。此时可计算稳定采样窗口为893 ps,采样窗口的大小适中。因此利用两个数模转换器进行仿真实验,得到其同时工作时输出信号的同步情况,如图4所示,在960 MHz的高频率下采样稳定,且两个数模转换器在同时工作时,输出信号稳定、同步性较好。验证表明,此设计可实现射频前端的同步,保证超宽带数字相控阵雷达的同步的功能。

图4 同步性能测试结果
5 结 语
本文从影响数字相控阵雷达性能的天线阵面出发,对射频前端的同步制定了时间同步方案,创新性地应用了分布式零延时锁相环系统、时间数字转换器反馈机制,保证了同步信号与工作时钟的同步性,通过试验验证了该系统设计具有较好的同步性能,以及在高频率(960 MHz)的情况下能够达到稳定采样,数模转换器的输出信号稳定、同步性较好,数字相控阵雷达的同步性能较好。对数字相控阵雷达的同步设计进行研究,可以提高雷达的应用效果,推动雷达技术的优化发展。
参考文献:c[1] 赵荣超.数据处理及报告生成软件在有源相控阵天线多波束自动测试技术中的实践与运用[J].通信电源技术,2021,38(4):75-77.
[2] 崔卫东,肖晶,马凯.子阵数字化双频相控阵波束指向分析[J].火控雷达技术,2020,49(4):34-37.
[3] 李洋,胡纯栋,郑长勇,等.射频负离子源分布式定时同步系统设计[J].核电子学与探测技术,2021,41(1):178-182.
[4] 王玉江,刘刚,张迪雅,等.基于ADF4356锁相环的雷达频率合成器设计[J].舰船电子对抗,2022,45(1):105-110.
[5] 郭围围,尹勇生,龚号,等.基于时间放大技术的时间数字转换器的设计[J].电子测量与仪器学报,2022,36(4):98-105.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
计测技术(2020年6期)2020-06-09
电子制作(2019年15期)2019-08-27
电子制作(2019年24期)2019-02-23
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年5期)2016-04-22