光电稳定平台的机械谐振抑制
2022-12-22 07:34:22卫剑梅
电视技术 2022年11期
路 新,卫剑梅,郑 尧
(1.中国电子科技集团第三研究所,北京 100015;2.陆航研究所,北京 101121)
0 引 言
随着光电成像跟踪侦察需求的发展,光电稳定平台不仅要具有“一机多能”的效果,而且应具备高精度、高稳定性及快速响应的特性。由于集成了激光、红外、可见光等多种跟踪和测量手段,为了提高作用距离和分辨率,光学系统的焦距、视场也呈现加大趋势,导致稳定平台托载装置增多,头部体积增大,整机结构的固有频率越来越低。从伺服控制的角度看,系统对光电稳定平台各种精度的要求不断提高,提高稳定、跟踪精度,必须增加伺服带宽。频带越宽,动态误差越小,响应越快。当平台的谐振频率和伺服系统的频率接近到一定程度时,伺服系统的振动激起平台谐振,伺服负反馈的存在又使谐振持续,并伴有入耳噪声。因此,如何抑制稳定平台的机械谐振备受关注[1]。
1 光电稳定平台谐振的产生
稳定平台在设计轴系时通常将力矩电机和负载放置于传动轴两端,电机在输出驱动力矩时,会使轴系产生相应的弹性扭转形变。因此,可以将稳定平台简化为一个二阶电机-弹簧-质量构成的振动子系统,动力学方程如下[2-3]:

式中:J为转台的转动惯量,K为弹性连接体的扭转刚度,F为阻尼系数,θi为电机输入角,θ0为转台输出角。
若令

式中:ξ为阻尼比,ωn为平台无阻尼固有频率。则:

式中:ωo为机械谐振频率。
从上面的式子可以看出,ωo的大小取决于平台结构无阻尼固有频率ωn和阻尼比ξ。影响平台机械谐振的因素包括结构刚度、负载的转动惯量以及弹性扭转系数。
2 机械谐振对稳定平台控制的影响
平台伺服控制相角裕量γ、闭环截止频率ωb与ωn,ξ的关系如下:

由式(4)、式(5)可以看出,系统的相角裕量γ和闭环带宽ωb均与机械谐振有关。较低的谐振频率影响了系统的稳定性,限制了系统的闭环带宽[4]。
工程上常用相角裕量来衡量控制系统的相对稳定性。式(4)中,γ越大,系统越稳定。而系统的快速性、阶跃过渡时间等动态指标却是由闭环截止频率ωb决定的。ωb越大,系统的响应速度越快,过渡时间越短。系统的带宽越大,响应速度越快,稳定精度和跟踪精度越高。当谐振频率高于闭环带宽,控制系统受其影响就很微弱。反之,稳定平台就会出现振动现象,影响设备性能和光学载荷寿命。
由以上公式推导可知,稳定平台的机械谐振频率改善有两种途径:一是结构设计提高系统阻尼、增强结构强度来提高谐振频率,但这种方法势必使产品成本上升,设计加工难度提高;二是伺服控制设计陷波器,尤其是在稳定平台已经装配完成后,为有效抑制机械谐振,只能使用方法二[5-6]。
3 常用陷波器
以前只有模拟电路设计控制系统时,常用经典双T网络设计陷波器,其传递函数如下:

调整系数k就可以改变陷波器的带宽。很明显,这种陷波器只能对称调整陷波带宽,不能调整衰减增益和陷波器的凹口宽度,因此陷波效果不是很理想。
由于数字控制器的广泛使用,数字滤波器的设计被引入,对双T网络陷波器进行改进:

式中:a,b是待调参数,ωo为谐振频率。
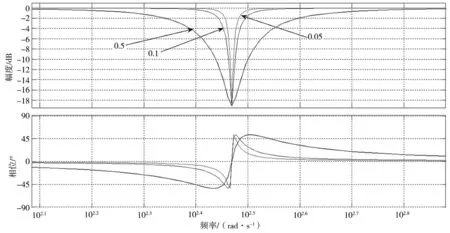
使用该陷波器时,要保证a a,b同时缩小相同倍数时,陷波器ωo频率处衰减倍数不变,陷波器带宽变窄;反之,a,b同时放大相同倍数,陷波器ωo频率处衰减倍数不变,陷波器带宽变宽。保持a,b差值不变,同时减小相同的数值,陷波器带宽不变,陷波器ωo频率处衰减倍数增加,反之,a,b同时增加相同数值,陷波器带宽不变,陷波器ωo频率处衰减倍数减小。 为更直观地展现该陷波器的特性,使用MATLAB软件编写M文件。设ωo=293 rad·s-1,a=90,b=330,a,b同时减少5,15,30相同数值,陷波器的衰减增加,其幅度、相位Bode图如图1所示。 图1 同时减少a,b值时陷波器的幅度、相位Bode图 同理,相同参数下,a,b同时缩小0.05,0.1,0.5倍,陷波器的带宽逐渐变大,而衰减增益没有变化,其幅度、相位Bode图如图2所示。 图2 同时缩小a,b值时陷波器的幅度、相位Bode图 某光电陀螺稳定平台在调试过程中出现机械谐振,通过CCS3.3调试软件采集陀螺数值,利用MATLAB软件进行快速傅里叶变换(Fast Fourier Transform,FFT)后发现谐振峰值在114.3 Hz处最大。利用章节3.1所述陷波器不断调试,得到最终陷波器传递函数为 由于角速度回路控制周期为0.5 ms,通过MATLAB软件的c2dm函数将式(8)离散化得: 将式(9)放入角速度环校正环节后,机械谐振得到有效抑制。通过加入陷波器前后陀螺反馈数据的频谱图直观观察,如图3、图4所示。 图3 使用陷波器前的陀螺数据频谱 图4 使用陷波器后的陀螺数据频谱 通过图3、图4两图的对比可以看出,114.3 Hz处的谐振峰被抑制下去,陷波器对结构谐振进行了有效的抑制。通过调试也发现,在使用陷波器后,可以将系统增益再继续提高,以弥补陷波器带来的增益损失,扩展系统带宽,改善动态性能,减少动态误差,提高系统开环增益和精度。 本文通过工程实践验证了陷波器在稳定平台中的应用方法。结果表明,采用该方式,可以精确抑制稳定平台的机械谐振,提高平台性能,扩展了系统带宽。该陷波器结构简单,利用仿真软件MATLAB软件可以方便地调整参数,快速地应用到工程设计中。
4 工程实践




5 结 语
猜你喜欢
小学生学习指导(低年级)(2023年10期)2023-10-28 06:34:46
小学生学习指导(低年级)(2023年4期)2023-05-09 11:52:54
小学生学习指导(中年级)(2022年9期)2022-09-30 03:15:40
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
新高考·英语进阶(高二高三)(2016年4期)2016-09-19 08:16:50
西部广播电视(2015年3期)2016-01-15 02:05:44
广西科技大学学报(2015年4期)2015-02-27 12:22:27