基于多光谱遥感技术的水上智慧运维系统设计
2022-12-22 13:50伍玲密虞君锚沈茗戈
河南科技 2022年23期
伍玲密 虞君锚 方 懿 沈茗戈
(1.浙江安防职业技术学院,浙江 温州 325016;2.上海交通大学,上海 200240)
0 引言
随着无人机技术的发展,无人机被广泛应用于航空摄影、应急救援、疫情防控、河道巡检等领域。近年来,国内外学者对无人机在河湖管理方面的应用进行了大量研究工作。Esakki等[1]曾尝试开发用于偏远水体藻类收集的漂浮四旋翼无人机,再通过微观分析来识别物种。李杨等[2]利用无人机遥感技术对整个水域的水生植物分布和生物量信息进行调查研究。李维涛等[3]借助Matlab 的数值影像图形处理功能,对河道水面漂浮物进行识别和定位。唐桂荣等[4]利用聚类和构建卷积神经网络对污染水域进行提取、分类和识别。但水空两栖无人机和水上无人机的应用大多停留在图像处理、水质采集等单一层面,河道清理主要依靠单人乘坐小木船,使用渔网进行打捞或人工驾驶打捞船进行作业,而智能化和集成化的功能有待进一步研究。
为了有效保护水域生态环境和减轻人工劳作强度,本研究提出一种基于多光谱遥感技术的水上智慧运维系统,以实现水面自动清理为主要突破点,同时集成水域数据获取、水质取样、水体净化等辅助功能,从而实现多功能、多任务、多模式的日常运维和监测,深入推进水环境综合整治。系统采用主处理模块加传感器采集处理模块的联合控制方式,并融入串级比例积分微分控制算法,实现对无人机和无人船的控制,使其具有成本低、集成度高和拓展性强的优点。
1 总体结构设计方案
水上智慧运维系统由无人机、无人船[5]和地面控制站三大部分组成,主要用于实现对水面垃圾的自动清理,如图1 所示。从系统主要功能出发,对无人机和无人船的机械结构、硬件电路、运动学建模和软件算法进行设计。
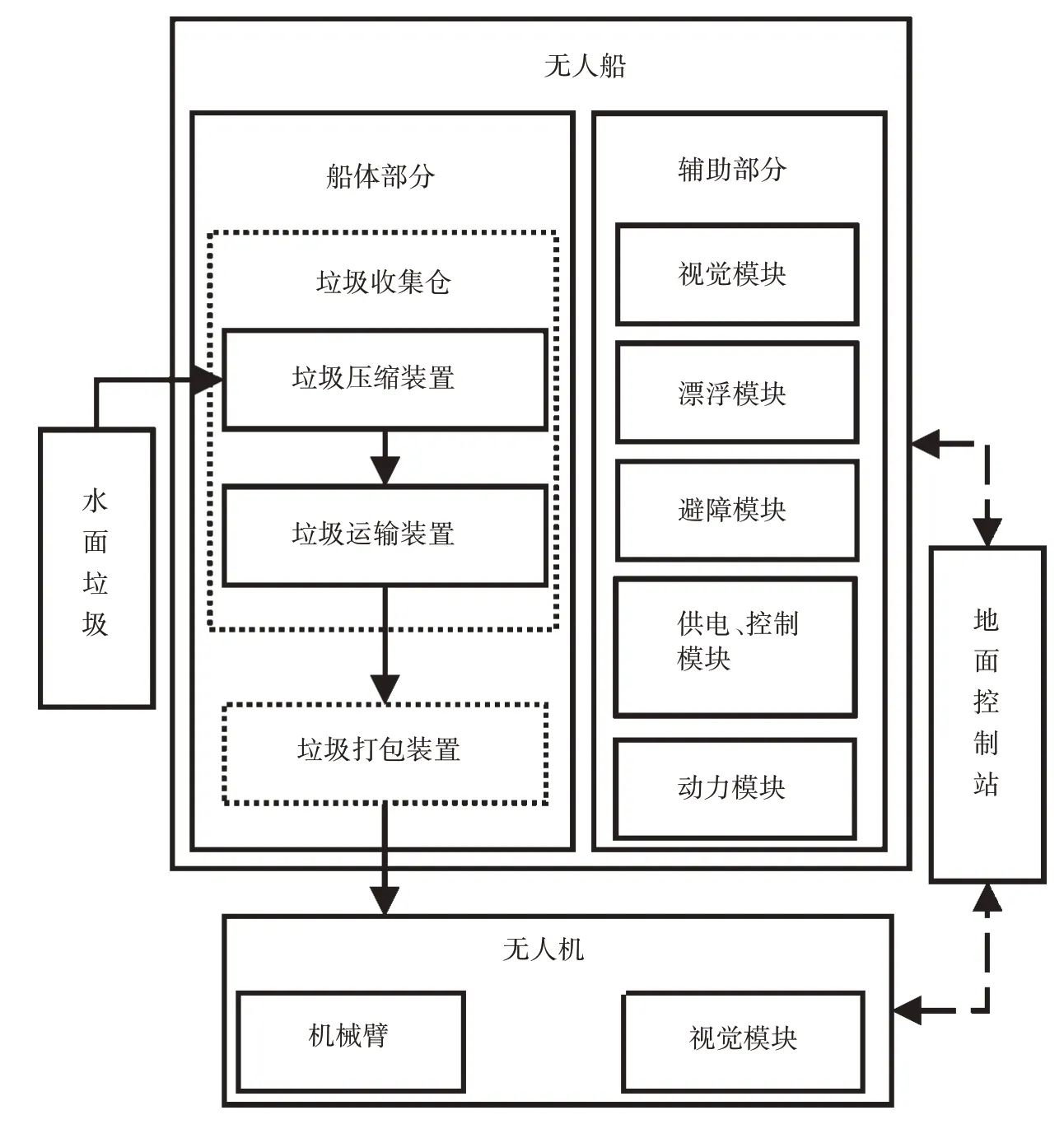
图1 系统结构组成及工作原理
从无人机结构来看,四旋翼无人机和六旋翼无人机的结构相对简单,且具有操控灵活的优点,但六旋翼无人机的轴距更大,有更高的承受载荷,本研究优先考虑以六旋翼无人机为基础进行结构设计。
无人机借助多光谱视觉模块对水域进行巡检时,通过搭载在无人机上的数码相机和多光谱仪等设备来获取影像数据,具有数据采集灵活、图像分辨率高等优点。无人机定位水面垃圾所在区域后,会把位置信息发送给地面控制站,并对图像进行实时传输。工作人员根据地面控制站获取的水域画面来判断水域面积大小,并决定是否要派遣无人船队[6-7]。如果水域面积较小,则只需一艘无人船即可完成水面清理工作,通过地面控制站对无人船的任务和路线进行规划。无人船到达指定区域后进行作业,水面垃圾进入无人船的垃圾收集仓,经压缩、运输后进入打包装置,打包好的垃圾最终由无人机进行回收。
2 系统硬件电路设计
2.1 无人机硬件电路设计
无人机硬件电路(见图2)采用主处理模块加传感器采集处理模块联合控制的方式。

图2 无人机硬件电路框图
主处理模块主要负责通信处理,发布任务给飞行执行模块来完成相应的飞行任务,并控制视觉模块的图像处理和机械臂的运行。主处理模块设计时采用树莓派4B 作为主处理芯片,其CPU 为ARM Cortex-A72 处理器,拥有1.5 GHz 的处理能力,能满足视觉图像处理的需求。系统以无人机为载体,搭载具备2 080万像素、5.2K 超清画质的大疆禅思Ze⁃nmuse X5S镜头,用于获取水域数据,实现对水域内水面垃圾的动态监测。
传感器采集处理模块主要负责无人机定位、定高和姿态控制。传感器采集处理模块芯片采用ARM 公司生产的STM32H743,定位模块采用支持北斗和GSP的M8N高性能卫星接收芯片,气压计采用HP206C 高精度芯片,可以测量300~1 200 Mbar的压力。惯性测量单元(Inertial Measurement Unit,IMU)采用MPU6050 模块整合六轴运动处理组件,其包含的陀螺仪可准确测量无人机在空间内3 个坐标轴方向的姿态角,其内部的加速度计能够测量无人机的加速度。
2.2 无人船硬件电路设计
无人船的硬件电路设计采用与无人机硬件电路相似的原理,如图3 所示。主处理模块沿用无人机的树莓派4B 芯片,主要负责通信模块、行驶模块、垃圾处理模块和视觉模块的运行。通信模块用于无人船队间的通信,协调船只的任务规划。无人船由两个电机带动的螺旋桨来提供动力。在选择无人船队行驶模块、垃圾处理模块的压缩电机和运输电机时,选用调速范围大,过载、启动、动转矩大,易于控制,可靠性高的直流电机,打包电机则采用速度较低的小型直流电机。直流电机驱动器采用工作电流较大、驱动能力较强的A4950 电机驱动芯片。无人船的视觉模块参照无人机相同的硬件配置。由于水面航行的高度基本保持一致,与无人机相比,无人船的传感器采集处理模块少一个定高模块,多一个外部感知模块,通过处理超声波传感器采集到的数据来实现避障。

图 无人船硬件电路框图
3 运动学建模
对无人机和无人船进行受力分析,通过模型线性化对模型进行简化,建立模型公式,方便主处理器处理系统中的无人机和无人船位姿(即位置和航向)。
3.1 六旋翼无人机运动模型(空中飞行)
假设六旋翼无人机除了受重力和升力影响外,不受其他力的影响,如图4 所示,无人机升降、俯仰、横滚和偏航4种运动的控制量见式(1)。

式中:U1、U2、U3、U4分别为总升力、俯仰力矩、横滚力矩、偏航力矩[8]。这四种运动的控制量直接与无人机飞行控制算法的输出量相关联;F1、F2、F3、F4、F5、F6分别为1~6号螺旋桨提供的升力;a为各电机到无人机中心的距离;k1、k2、k3、k4、k5、k6为转矩系数。
3.2 无人船运动模型(水面行驶)
如图 4(d)所示,(XG,YG)为地面坐标系,(XL,YL)为船体坐标系,OL为船体中心,OLXL为船体前进方向,设p 为无人船的位姿,船体的运动学模型见式(2)。

图4 运动学建模

式中:(x,y)为船体位置;θ为船体航向角。
4 软件算法控制
一般的PID控制算法是根据反馈量与输入量的偏差,按比例、积分、微分的函数关系进行运算,并不断调整参数,没有对控制对象进行细致分析。这种算法对控制对象滞后和时间常数很大、干扰作用强且频繁的系统,是很难通过调整最佳参数来获取高质量的控制效果。因此,本研究采用串级PID 控制算法[9-11],通过引入一个副变量来增加系统的工作频率,能提高系统的自适应负荷能力和抗干扰性。
4.1 六旋翼无人机飞行控制算法
六旋翼无人机飞行的串级PID 控制算法分为内外两个控制环,如图5 所示。其中,外环用于控制姿态角,内环用于控制角速度,可增强系统的稳定性和精度。俯仰、横滚和偏航3 个期望姿态角(αe,βe,γe)与 IMU 姿态解算后反馈得出实时姿态角(α,β,γ)的角度偏差,经外环的微分运算输出角速度,即内环期望角速度(pe,qe,re)与陀螺仪测得的实时角速度(p,q,r)的偏差作为内环输入,最终内环输出通过控制量转换得到不同的脉冲宽度调制(Pulse Width Modulation,PWM)信号,用于控制电机的转速,从而实现无人机的稳定飞行和各种姿态变换。
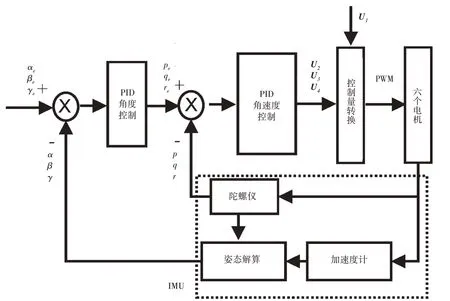
图5 无人机姿态控制流程
4.2 无人船行驶控制算法
以地面坐标系为参考坐标系,无人船行驶的串级PID 控制算法(见图6)分为内外两个控制环,外环用于控制无人船的位姿,首先将无人船的期望位姿(x,y,θ)与IMU 位姿解算后反馈的实时位姿(X,Y,Θ)的偏差传输给外环PID控制器,通过微分运算输出无人船的角速度,通过比例运算转换成线速度v,再根据运动学方程进行微分运算,得到左螺旋桨加速度aL和右螺旋桨加速度aR,作为内环的期望值输入,内环用于左、右螺旋桨的加速度控制,加速度aL和aR经过比例运算转换成控制左右电机转速的PWM 信号,用于调整左右螺旋桨的转速nL和nR,从而实现对无人船的姿态变换。
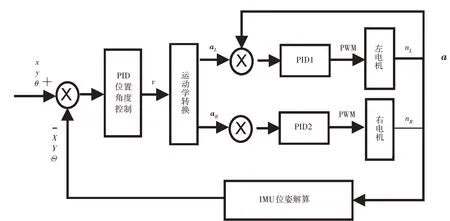
图6 无人船位姿控制流程
5 结语
基于多光谱遥感技术的水上智慧运维系统解决方案主要对无人机和无人船进行设计,涵盖机械结构设计、硬件电路设计、运动学建模和软件算法设计。多光谱遥感技术能快速无损地获取水域的高分辨率影像数据。主处理模块加传感器采集处理模块联合控制方式能较好地处理主控硬件平台与各种传感器的通信、数据处理与分析,从而保证系统的稳定性和可靠性。串级PID 控制算法在增加系统工作频率的同时,提高系统的抗干扰性,达到更好的控制效果。后续可在此基础上开展水陆空三栖系统的开发与设计。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
纺织科学研究(2020年1期)2020-05-21
广东医科大学学报(2020年6期)2020-02-06
电子制作(2019年9期)2019-05-30
中国微创外科杂志(2018年9期)2018-10-09
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2016年8期)2016-11-16
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01