
永磁同步电机离散滑模位置估计与性能分析*
2022-12-21 08:37刘宜成杨海鑫王学庆熊宇航
组合机床与自动化加工技术 2022年12期
刘宜成,杨海鑫,王学庆,熊宇航
(四川大学电气工程学院,成都 610065)
0 引言
永磁同步电机作为一种结构简单、运行效率高、可靠性高的交流电机,被广泛应用于航空航天、电动汽车、机器人等领域[1]。转子位置的精确获取,是永磁同步电机控制系统中非常重要的一个环节[2],常用方法有编码器和位置估计两种。在一些低成本、轻量化、强干扰的场景中,位置估计方法得到广泛应用[3]。
滑模观测器具有结构简单、高鲁棒性、易于实现等优点,被广泛应用于中高速永磁同步电机位置估计[4]。传统滑模观测器通常需要先设计定子电流滑模观测器[5-8],利用滑模等效控制原理[9]获得反电动势估计值;然后,使用低通滤波器、观测器[10]等方法,获取平滑的反电动势估计值;最后,使用反正切、锁相环[11]等方法,获取电机位置信息。
传统滑模观测器使用的低通滤波器会导致反电动势估计值存在相位滞后,影响角度估计精度。陆骏等[12]根据Lyapunov稳定性理论,设计了滑模永磁同步电机直接转速观测器,省去了低通滤波环节,但需要准确的电机反电动势常数值;王丽华等[13]使用混合非奇异终端滑模,设计了新型位置观测器,避免了低通滤波带来的相位滞后问题,该方法使用微分器来获得电流观测值的微分,运算复杂,在低端控制芯片上较难实现;陆婋泉等[14]设计了基于扰动观测器反电动势连续估计方法,但并没有分析其在离散域中的收敛性,在实际应用时可能存在抖振较大,无法收敛的问题。
为了在实际离散控制系统中取得更稳定的滑模观测效果,本文将反电动势视为扰动信号的思想[14]进一步推广到离散域。本文对永磁同步电机数学模型进行离散化,设计离散滑模扰动观测器,获得反电动势观测值,从而计算出转子位置。通过使用饱和函数作为滑模切换项,实现准滑动模态控制,减小滑模抖振。此外,本文还对所设计的离散滑模扰动观测器进行收敛性分析。相较于传统观测器算法,本文方法省去了反电动势滤波和相位补偿环节,避免相位滞后影响位置估计精度。实验结果表明本文方法能够精确地估计永磁同步电机转子位置,可以应用于高性能永磁同步电机无传感器控制系统。
1 永磁同步电机数学模型
为了简化永磁同步电机在三相坐标系ABC下的数学模型,通常需要进行坐标变换,将复杂的永磁同步电机耦合模型进行解耦。常用的变换坐标有:两相静止坐标系α-β,该坐标系相对于三相坐标系ABC保持静止,其α轴与A轴重合;两相同步旋转坐标系d-q,该坐标系相对于三相坐标系ABC以电角速度ωe旋转,其d轴与A轴存在角度差θe,即电角度。转子位置观测器通常都是基于两相静止坐标系α-β进行设计的。上述各坐标系之间的位置关系如图1所示。

图1 各坐标系之间位置关系
对永磁同步电机做出如下假设:
(1)定子绕组为三相对称分布Y形接法,各绕组轴线在空间中互差120°;
(2)忽略定子绕组齿槽对气隙磁场分布的影响;
(3)忽略定子铁心和转子铁心之间的涡流损耗和磁滞损耗;
(4)忽略定子铁心磁饱和。
基于上述假设,永磁同步电机在静止坐标系α-β中的电压方程为:
(1)
式中,u=[uαuβ]T为定子电压α-β轴分量;Ld和Lq为定子电感轴d-q分量;Rs为定子电阻;ωe为电角速度;i=[iαiβ]T为定子电流在α-β轴的分量;E为静止坐标系α-β下的扩展反电动势,其表达式为:
(2)
式中,ψf为永磁磁链;θe为电角度。
对于表贴式永磁同步电机,其定子电感近似有:Ld=Lq=Ls,对式(1)进行化简并改写为电流状态方程:
(3)
实际工程中的控制系统都为离散系统,为了取得更好的观测效果,本文后续的观测器设计都将基于离散电流状态方程进行,电流状态方程式(3)的离散形式为:
(4)
式中,k为采样时刻;i(k)、u(k)、E(k)分别为k时刻的电流采样值、电压采样值、反电动势采样值;Ts为离散系统采样时间。后文也采用此类表示方法对离散状态方程进行描述。
2 新型离散滑模观测器
为了避免对反电动势进行滤波导致相位滞后,将反电动势视为一个扰动信号,对其设计离散扰动观测器,实现了对反电动势的直接观测。
2.1 基于扰动观测器补偿的离散滑模观测器设计
在电流状态方程含有反电动势信息,为了获取反电动势估计值,设计带有扰动观测补偿的电流滑模观测器如下:
(5)

定义定子电流观测误差为:

(6)
结合式(4),可得电流观测误差离散状态方程:
(7)
为了使书写简便,令
(8)
则式(7)改写为:

(9)
为了减小反电动势对电流观测误差收敛的影响,同时也是为了能够直接获取反电动势估计值,将反电动势E(k)视为一个扰动,将式(5)中的滑模观测器控制量设计为带有扰动观测补偿的形式:

(10)

离散滑模控制输入γ(k)设计为:
(11)
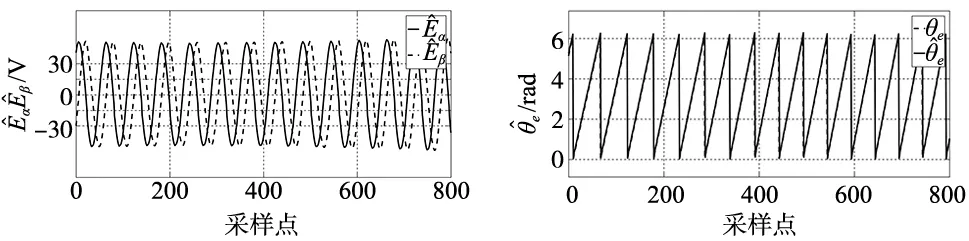
式中,0 (12) (13) (14) 结合式(11)和式(14),电流观测误差式(9)进一步推导可得: (15) (16) 由式(14)和式(15)可推导出反电动势观测误差的表达式为: (17) 当扰动观测器完成对反电动势的观测收敛后,可推导出永磁同步电机电角度估计值如式(18)所示。由于电角度乘上电机极对数可获得位置角,因此获得电角度估计值,也即获得了位置角估计值。 (18) 本文所设计的离散滑模观测器的整体控制框图如图2所示。 图2 离散滑模观测器整体控制框图 传统位置估计方法系统流程框图与本文方法流程框图对比如图3所示。 图3 本文方法与传统方法结构对比 根据文献[15]提出的带扰动补偿的离散滑模控制器收敛性解耦分析方法,将反电动势观测误差式(17)表示为两个分量相加的形式: (19) (20) (21) (22) (23) 可见,第一分量的元素能够收敛到λ/g范围内。 由上述分析可知,反电动势观测误差各个分量都能够完成收敛: (24) 该观测器可以确保反电动势观测误差在经过一定时间后完成收敛。 电流观测器在α轴和β轴上的分量具有相同的表达形式,因此本文只对α轴分量收敛性进行分析,β轴分量的收敛性与α轴一致,故不再赘述。 对于电流观测误差式(15),从以下3种情况对其收敛性进行分析: (25) (26) 满足滑模到达条件,观测误差将会向原点收敛。 (27) (28) 故此时有: (29) (30) (31) 故此时有: (32) 综上所述,电流观测误差值最终都将会收敛到n+Bλ/g范围内,保证了观测器的收敛性。 为了减小滑模抖振,采用饱和函数sat(·)替换符号函数,饱和函数定义为: (33) 当系统状态在边界层k以内时,被称为准滑动模态,此时系统收敛性能够得到保证[16]。 为了验证本文所设计的滑模观测器可行性,在100 W永磁同步电机实验平台上进行实验,实验平台如图4所示。 图4 实验平台 实验所使用控制芯片为国产32位单片机SC32F5632,该芯片采用Cortex-M0内核,最高工作频率64 MHz,只能进行定点数运算。实验所用电机参数如表1所示。 表1 永磁同步电机参数 设置PWM周期8 kHz,新型离散滑模观测器参数m=0.01,λ=2,g=0.99,n=0.033 6。使用光电编码器获取转子位置反馈信号,让电机在矢量控制模式下运行,使用上位机软件采集数据,分析本文所设计观测器的稳态、暂态性能。 图5为电机以800 r/min转速空载稳定运行时,获得的观测器稳态性能实验结果。 (a) 反电动势观测值 (b) 电角度实际值与观测值 (c) 电角度观测误差 图6为电机以2000 r/min转速空载稳定运行时,获得的观测器稳态性能实验结果。 (a) 反电动势观测值 (b) 电角度实际值与观测值 (c) 电角度观测误差 由稳态实验结果可以看出,本文方法在不同转速稳态时都能够得到平滑的反电动势观测值,将反电动势观测值按照式(18)进行反正切处理后,可得到准确的电角度观测值。在800 r/min稳定运行时的电角度估计误差平均值为-0.05 rad,2000 r/min稳定运行时的电角度估计误差平均值为-0.07 rad。使用离散扰动观测器来对反电动势进行直接观测,只要参数设置恰当,保证式(12)成立,就能确保反电动势观测误差在任意转速下都能够完成收敛,从而获得准确平滑的反电动势观测值,不需要针对不同转速设置不同的相位补偿值。 图7给出了电机速度指令从1000 r/min突变至2000 r/min时,本文所设计观测器的暂态性能实验结果。 (a) 电机速度响应曲线 (b) 反电动势观测值 (c) 电角度实际值与观测值 (d) 电角度观测误差 由暂态实验结果可以看出,当速度指令发生突变后,电机在控制器的作用下经过一个暂态过程后速度达到稳定。在电机暂态过程中,随着电机转速的增大,观测反电动势幅值也随之增大,符合式表示的反电动势和转速之间的关系。通过如图7d所示的电角度观测误差可以看出,本文所设计的观测器在暂态过程中仍能够输出准确稳定的电角度观测值,不受电机暂态过程影响,表明该离散观测器具有较好的收敛能力,能够保证滑模运动的稳定性。 本文通过使用离散滑模扰动观测器对反电动势进行观测的方法,设计了新型永磁同步电机转子位置估计算法,并分析了该算法在离散域中的收敛性。实验结果表明,该方法能够获得平滑的反电动势估计波形,从而获得稳定、精确的位置估计值。由于本文方法无需使用滤波器对反电动势估计值进行处理,故相较于传统位置估计算法,本文方法简化了位置估计系统结构。本文方法还有着算法简单、易于工程实现的特点,在运算能力较弱的控制芯片上能够取得良好的观测效果,适用于对永磁同步电机无传感器控制系统成本有要求的应用场景。后续研究将在使用本文基础上,对模型参数鲁棒性和转速估计算法进行优化,提高永磁同步电机无传感器控制系统的易用性、稳定性、鲁棒性。





2.2 扰动观测器收敛性分析


2.3 滑模电流观测器收敛性分析



3 实验分析







4 结论
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
数学物理学报(2021年5期)2021-11-19
防爆电机(2021年2期)2021-06-09
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
科教导刊·电子版(2017年16期)2017-07-21
