高速磁浮系统最小能耗下的运控曲线计算
2022-12-16 01:50:14张雷
电源学报 2022年6期
张雷
(中铁第四勘察设计院集团有限公司电气化设计研究院,武汉 430063)
高速磁浮交通牵引供电系统主要由牵引变电所、馈电电缆、轨旁开关站和长定子直线同步电机等组成[1-3]。
为了提高列车运行时的加速度,高速磁浮牵引系统由传统的1 套牵引变流器增加为2 套牵引变流器,并通过馈电电缆并联,再由定子开关站决定是否给定子段供电[4-6]。
由2 套变流器进行供电的工作模式被称为双端供电,是目前高速磁浮交通特有的供电方式。该方式很好地解决了单台变流器工作时超过额定容量的问题,提高了整个牵引供电系统的可靠性。但是双端变流器的并联产生了环流[7-8],进而导致变流器电流波形发生畸变;除此之外,高速磁浮交通系统馈电电缆的损耗会随着里程和电流频率的变化而变化,电机铜耗也会因为列车的牵引力变化而变化。因此在降低能耗的基础上如何分配2 套变流器的电流是目前的研究热点。
文献[9]通过共用转速调节器实现总负载电流控制,然后根据电流调节器和环流调节器对负载电流进行分配,减小了线路中的损耗和环流;文献[10]通过分析电缆长度和信号传输延时对控制性能的影响,提出对应的补偿方法,从而提高磁浮高速运行时的控制性能;文献[11]以混合型逆变器供电的交流传动系统为对象,采用直流侧独立供电抑制零序环流,并提出了一种直流电容稳压控制策略;文献[12]分析了死区效应、直流母线波动以及中点电压偏移这些非理想因素对环流的影响,并在此基础上提出了直接模式控制策略,抑制了非理性因素对并联系统导致的环流,但没有考虑两边馈线阻抗不同对环流造成的影响;文献[13]针对不同的线路区间采用不同的电流分配比来减小馈电电缆损耗,但不能根据线路情况实时调节分配比。
目前的算法都是在给定运控曲线的基础上通过电流分配策略来降低整个牵引系统的总能耗,并没有考虑运控曲线对系统总能耗的影响。因此本文提出以最小能耗方程作为目标函数,然后通过等电流法或等电压法去分配双端变流器的电流,最后根据拉格朗日极值法得到高速磁浮列车的运控曲线。经仿真计算发现,该方法能在满足等电流和等电压分配策略的情况下,找到符合约束条件的最小能耗点和其所对应的运控曲线,使整个系统的能耗降低。
1 双端供电模式下长定子直线同步电机数学模型
1.1 双端供电工作模式
当磁悬浮列车速度达到高速时,需要供电区间两端牵引变电站的变流器通过各自的馈线在开关站并联汇流后向定子绕组供电,来提供更大的牵引力[14]。其双端供电工作模式如图1 所示。
当磁悬浮牵引供电系统采用双端供电时,每端的变流器不用承受过大的容量,同时也保证了列车的运行安全,当一端供电故障时,还可以通过另一端的变流器为磁浮列车供电。图1 中的定子段采用三步法的方式进行换步,能够保证更高的牵引能力。

图1 双端供电工作模式(三步法)Fig.1 Double-ended power supply mode(three-step method)
1.2 长定子直线同步电机数学模型
一般来讲,高速磁悬浮列车的运行区间很长,因此本文将定子段的馈电电缆做了集中参数处理。在双端供电模式下,长定子直线同步电机三相静止坐标系下的数学模型[9]为
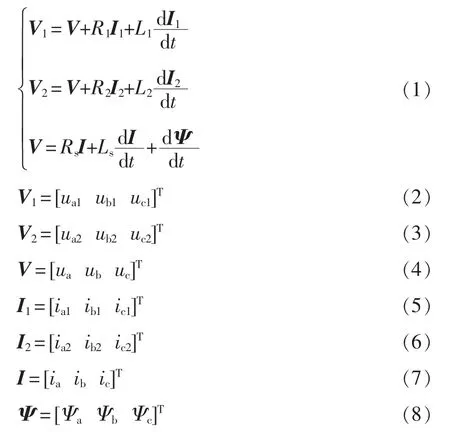
式中:ua1、ub1、uc1、ua2、ub2、uc2分别为双端变流器的三相输出电压;ua、ub、uc分别为三相定子电压;ia1、ib1、ic1、ia2、ib2、ic2分别为双端变流器的三相输出电流;ia、ib、ic分别为三相定子电流;Ψa、Ψb、Ψc分别为三相定子磁链;Rs、Ls分别为定子电阻和电感;L1、L2、R1、R2分别为双端馈电电缆的等效电感和等效电阻。
三相静止坐标系下,长定子直线同步电机的电感会随着动子的位置变化而变化,增加了控制难度。为了便于控制,本文采用等幅值变换将三相静止坐标系下的电机数学模型转换到d-q 坐标系下[15]。长定子直线同步电机在d-q 轴的等效电路如图2 所示。

图2 长定子直线同步电机d-q 轴等效电路Fig.2 d-q axis equivalent circuit of long-stator linear synchronous motor
则d-q 轴的电机数学模型为

式中:Ld、Lq为d、q 轴的定子绕组电感;τ为极距;v为列车速度;ω为动子角速度;p为微分算子;Msm为定、动子间的互感;im为励磁电流;id1、iq1和ud1、uq1分别为左侧变流器d、q 轴的电流和电压;id2、iq2和ud2、uq2分别为右侧变流器d、q 轴的电流和电压。

式中,iq为q 轴的定子电流,其值为iq1与iq2之和。
2 最小能耗下运控曲线的计算
2.1 最小能耗下的运控曲线
已知高速磁浮列车的运行区间长度为xall,运行时间为tall。假设先以恒加速度a1加速一段时间t1,再匀速运行一段时间t2,最后以恒减速度a3减速一段时间t3。当确定t1、t2、a1,即可确定高速磁浮列车的整个运控曲线。运控曲线如图3 所示。

图3 高速磁浮列车的运控曲线Fig.3 Operation control curve of high-speed maglev train
则高速磁浮列车的约束方程为

根据牛顿第二定律,高速磁浮列车的动力学方程为

式中:Fx为列车的牵引力;FZ为列车的阻力;m为列车的总质量;a为列车的运行加速度。高速磁浮列车的阻力方程为

式中:FA、FM、FB分别为空气阻力、磁阻力、发电阻力;N为车辆编组数。
根据式(9)~式(13)可以得到双端变流器的输出瞬时功率为


式中:Lu、Ru分别为供电电缆的单位电感和单位电阻;x为列车的位移;P1、P2分别为双端变流器输出的瞬时功率。通过对双端变流器输出的瞬时功率积分,即可得到区间总能耗为

以式(25)为目标方程、式(15)为约束方程,通过拉格朗日条件极值法可以计算出t1、t2、a1参数,从而可以得到最小能耗下的运行曲线。
目前高速磁浮系统多采用等电流和等电压策略对2 台变流器的输出电流进行分配,本文也是在分配策略确定的基础上计算最小能耗的运控曲线。下面将详细介绍等电流和等电压分配策略下运控曲线的计算步骤。
2.2 最小能耗下的等电流分配策略
等电流分配策略是指双端变流器的输出电流相等,即iq1=iq2。当在第1 个区段时间t1内时,速度和位移分别为v=a1t、x=则q 轴给定电流为

将式(26)代入式(21)和式(22),可以计算出P1=P1(t,a1)、P2=P2(t,a1)。再根据式(25)计算出第1区间的能耗Ws1=Ws1(t1,a1)。当在第2 个区段时间t2内时,速度和位移分别为v=a1t1,x=则q 轴给定电流为

将式(27)代入式(21)和式(22),可以计算出P1=P1(t,t1,a1)、P2=P2(t,t1,a1),再根据 式(25)计 算出第2 区间的能耗Ws2=Ws2(t1,t2,a1)。则总能耗Wall=Wall(t1,t2,a1)在约束式(15)下的最小值点可以通过方程求得为

式中,λ为拉格朗日条件极值法的辅助系数。
2.3 最小能耗下的等电压分配策略
等电压分配策略是指两端变流器的输出电压相等,即V1=V2。按照等电压法分配的电流分别为I1=αI、I2=(1-α)I,则式(1)可转换为

式中,α为等电压分配系数。通过求解一阶线性常微分方程式(29),可以得到分配系数α为

式中,C为常数,由α(t=0)=0 确定。第1 区间和第2 区间的双端变流器输出瞬时功率的计算与等电流法一样,然后再根据式(25)计算出能耗Ws1=Ws1(t1,a1)、Ws2=Ws2(t1,t2,a1)。最后通过式(28)计算得到最小能耗对应的参数a1、t1、t2,进而得到运控曲线。
3 仿真分析与计算
将最小能耗下的等电流法和等电压法使用MATLAB 进行编程,并根据拉格朗日条件极值法计算出高速磁浮系统的运控曲线。供电电缆参数与长定子直线同步电机参数如表1 和表2 所示。
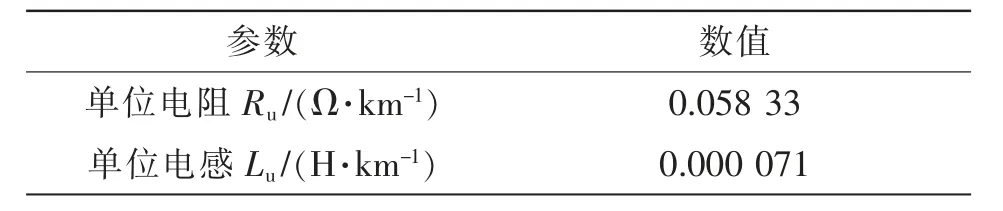
表1 供电电缆参数Tab.1 Parameters of power supply cable
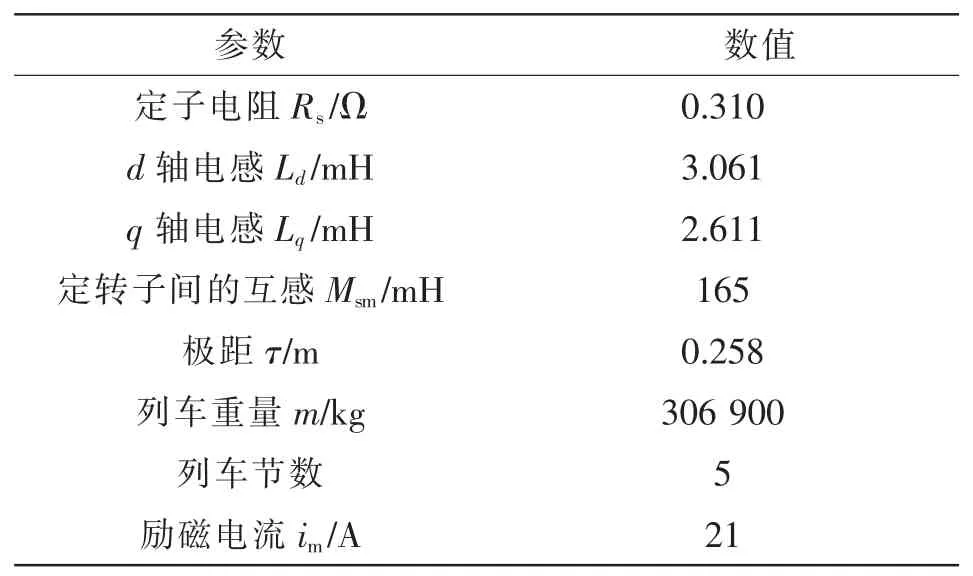
表2 长定子直线同步电机参数Tab.2 Parameters of long-stator linear synchronous motor
基于最小能耗的等电流分配策略下的运控曲线如图4 所示。由图4(a)和图4(b)可以看到,满足区间长度50 km 和区间耗时400 s的限制,最高速度为598 km/h;图4(c)表示变流器的输出电流;图4(d)表示符合约束条件的(t1,t2,a1)点的总能耗,可以看到有最小值,且为2.27×1010J;图4(e)和图4(f)分别表示2 台变流器的输出瞬时功率。

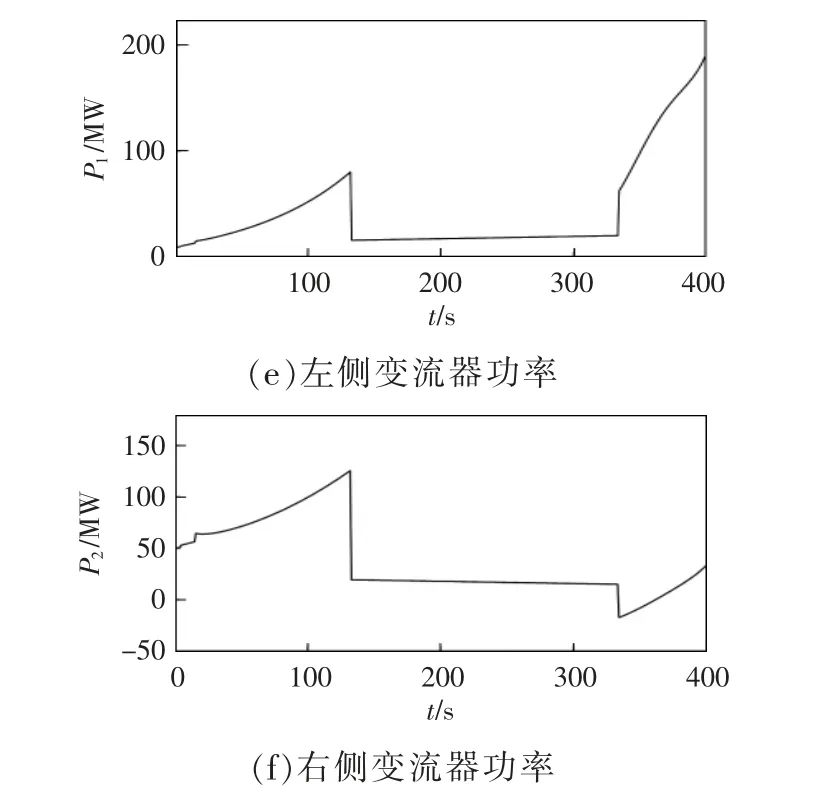
图4 等电流分配策略Fig.4 Equal-current distribution strategy
基于最小能耗的等电压分配策略下的运控曲线如图5 所示。由图5(a)和图5(b)可以看到满足区间长度50 km 和区间耗时400 s的限制,最高速度为542 km/h;图5(c)和图5(d)分别表示两端变流器的电流,可以看到,两侧电流不相等;图5(e)表示变流器的输出电压;图5(f)表示符合约束条件的(t1,t2,a1)点的总能耗,可以看到有最小值,且为1.82×1010J;图5(g)和图5(h)分别表示2 台变流器的输出瞬时功率。
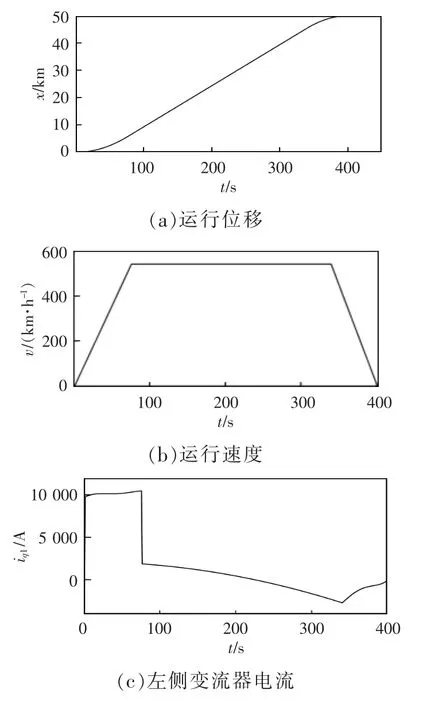

图5 等电压分配策略Fig.5 Equal-voltage distribution strategy
经过仿真计算发现,基于最小能耗的等电流分配法产生的总能耗要小于等电压分配法,但最高运行速度要高于等电压分配法;由于将两端变流器做了理想化处理,所以其输出电流和电压在有些区段超过了变流器的最大电流和电压,后续考虑在算法的基础上加入电流和电压的限制,提高算法的鲁棒性。
4 结语
本文对高速磁浮交通牵引系统进行等电流分配和等电压分配,并将能耗方程作为目标函数,区间长度和区间耗时作为约束函数,最后通过拉格朗日条件极值法计算得到高速磁浮的运控曲线。通过仿真计算发现,在满足等电流和等电压分配策略的情况下,所提方法能找到符合约束条件的最小能耗点和其所对应的运控曲线,从而使得整个系统的能耗降低;除此之外,通过计算发现等电压分配法的最小能耗要远远小于等电流分配法,但其最高运行速度要小于等电流分配法,因此可以在此基础上根据线路的具体情况选择不同的电流分配策略。
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
山东工业技术(2016年15期)2016-12-01 05:31:19
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
核科学与工程(2015年2期)2015-09-26 11:57:14
电测与仪表(2015年16期)2015-04-12 00:44:34
湖州师范学院学报(2015年4期)2015-03-11 16:39:43
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年19期)2014-04-04 12:06:22