
ATP制动曲线优化及咽喉区通过能力提升效果研究
2022-12-16 05:11贺广宇马云鹏郜新军
铁道运输与经济 2022年12期
贺广宇,王 菲,马云鹏,刘 敏,郜新军
(1.中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081; 2.中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
0 引言
目前中国部分高速铁路繁忙干线的运输能力已达到局部饱和,如京沪高速铁路(北京南—上海虹桥)徐州—蚌埠段等,因而有必要研究并进一步提升线路通过能力,缓解运力紧张现状、适应市场发展需要。列车控制系统作为保障高速铁路安全高效运行的重要基础,其关键部件列控车载设备的核心技术是列车自动防护系统(Automatic Train Protection,ATP)制动曲线计算模型,具体来说,即先由车载主控单元根据高速列车制动性能、线路条件和移动授权等因素计算生成制动曲线,再由车载设备根据制动曲线实时监控列车运行速度,一旦列车超速ATP将向车辆输出制动命令,保障列车安全运行[1]。
高速列车列控车载设备普遍采用目标距离连续速度控制模式。国内主要采用连续式一次制动的速度控制方式[2],但不同型号设备在制动参数配置和制动曲线计算方法上存在差异[3],如CTCS3-300T,CTCS3-400T和CTCS2-200C等型号通过实时计算法生成ATP制动曲线,CTCS3-300H和CTCS2-200H等型号通过查表法生成ATP制动曲线,CTCS3-300S,CTCS3-400H和 CTCS3-400C的 C3模块和后备C2模块分别通过实时计算法和查表法生成ATP制动曲线等。国外主流的列控系统如法国TVM300/TVM430、日本数字ATC和欧洲ETCS等,根据通行的ERTMS和IEEE 1474.1TM标准,采用连续一次制动的速度控制方式,各系统制动模型间也存在差异[4-6]。以往对ATP车载设备的制动曲线优化研究,往往会从制动模型优化、坡度分档和制动参数调整等角度开展,核心目的是缩短制动距离、提高运行效率。
ATP制动曲线既事关列车运行安全,又影响高速铁路通过能力,既有研究将ATP制动曲线和高速铁路通过能力分别归属为信号和运输专业,对ATP制动曲线的研究多从列车制动模型和制动曲线计算方法[7]的角度单独开展,未考虑制动曲线对通过能力的影响;而对高速铁路通过能力的研究又缺少列控车载设备制动曲线仿真支撑[8-10],少见利用ATP制动曲线对通过能力提升效果进行具体量化的研究。因此,亟需兼顾2种专业,以列控车载设备制动曲线基础理论为出发点、以提高通过能力为落脚点,通过交叉研究挖掘制动曲线的优化空间,更为充分地利用各种型号列控车载设备对应列车的制动效率。综上,考虑从跨专业技术融合的角度,利用列控车载设备制动曲线优化的视角研究高速铁路通过能力利用率。
1 列控车载设备制动曲线算法
列控车载设备制动曲线计算时,根据线路数据和列车厂家提供的车辆制动参数,采用实时计算法或查表法生成ATP制动曲线,以保证在任何情况下列车绝不越过移动授权终点。制动参数均来自列车厂家,并已配置在列控车载设备中,主要包括最大常用制动和紧急制动参数,每一类制动参数包含制动延时及制动减速度。使用车辆制动参数时须遵守以下原则。
(1)内部延时原则。对于制动延时参数,计算ATP制动曲线时应在采用制动延时参数的基础上额外考虑车载系统内部延时,例如CTCS3-300T,CTCS3-300S内部延时取值为1.00 s,CTCS2-200C,CTCS2-200H内部延时取值为0.62 s和0.50 s等。
(2)安全余量原则。对于制动减速度参数,ATP安全制动模型的减速度应取车辆最不利条件下的减速度,且任一速度等级下减速度取值不应超过车辆减速度的90%,预留10%的安全余量。
以我国自主研发的复兴号CR300BF型动车组为例,厂家提供的CR300BF制动减速度与列车速度对应关系(部分)如表1所示。

表1 CR300BF制动减速度与列车速度对应关系(部分)Tab.1 Corresponding relationship between braking deceleration and speed of CR300BF trains (partial)
①基于实时计算法的ATP制动曲线计算。列控车载设备采用将制动减速度分为6段的方式建立安全制动模型,算法详见文献[1],得到的CTCS2-200C型列控车载设备对CR300BF制动特性的分段拟合情况如图1所示。拟合时取最不利条件下湿轨加运阻的数据,以保证由于超速防护ATP触发紧急制动后列车在不越过移动授权终点的前提下安全停车。
除了现有研究已经涉及的高唐神女、观音、阿尼玛、鱼、力、死亡与再生、大地母亲与智慧老人等原型,沈从文的小说中还存在许多值得探究的原型。比如,《媚金·豹子与那羊》《月下小景》等小说是沈从文根据湘西神话故事改编而来的,其中涉及“难题求婚”的文学母题。又如,沈从文笔下有许多雄健俊美的男子,《渔》中的孪生兄弟、《边城》中的天保、傩送兄弟等,这类反复出现的男子形象,也可能蕴藏着某种原型。所有这些都有待学者们的深入探讨。
由图1可知,6段速度分段中,各速度段内的减速度均取列车减速度90%的最小值;当列车速度大于90 km/h时,湿轨紧急制动减速度小于干轨常用制动减速度。湿轨不利黏着状态下的列车紧急制动参数是列控车载设备进行控制的重要参数,如果该数值过于保守,列控车载设备必须提前进行进站减速,延长列车走行时间,浪费列车固有的制动性能。因此,湿轨紧急制动参数的取值直接制约列控车载设备的制动效率。

图1 CTCS2-200C型列控车载设备对CR300BF制动特性的分段拟合情况Fig.1 Segmented fitting of CR300BF braking characteristics by CTCS2-200C onboard train control equipment
在保证安全的前提下,为了提高分段式安全制动模型的效率,列控车载设备制动曲线在速度-减速度分段选取时,按ATP制动距离(根据分段减速度计算)与车辆制动距离之差d最小的原则进行优化求解,使得ATP制动曲线与车辆制动曲线整体拟合最优,即

式中:为ATP配置参数中速度档位为i(i= 0,1,2,3,4,5)时的制动减速度,m/s2;和分别为对应分段的制动初速度和制动末速度,m/s;aj为列车厂家提供的速度档位为j(j= 0,1,…)时的车辆制动减速度,m/s2;vj+1和vj分别为列车厂家提供的车辆制动初速度和制动末速度,m/s。
②基于查表法的ATP制动曲线计算。此时列控车载设备通过查询预先存储的制动数据表格的方式,简化制动曲线计算过程。制动数据表格根据不同线路坡度进行划分,线路坡度取值为以下7 档:0,-5‰,-10‰,-20‰,-25‰,-30‰和-35‰(取上坡为正、下坡为负,后同),对应生成的CTCS3-300H型列控车载设备使用的CR400BF列车制动数据如表2所示。

表2 CTCS3-300H型列控车载设备使用的CR400BF列车制动数据Tab.2 Braking data of CR400BF trains used by CTCS3-300H onboard train control equipment
列控车载设备紧急制动曲线计算公式为

式中:dEBD为紧急制动曲线中从初速度vj+1到末速度vj的制动距离,m;Aj为速度档位为j时车辆制动初速度和制动末速度所对应的紧急制动减速度,m/s2;ASj为在速度档位为j时的紧急制动减速度(该值由列车厂家提供)基础上乘以安全系数后的紧急制动减速度,m/s2;p为线路坡度值,‰;b为常量系数,通常取0.9。
2 ATP制动曲线优化方案
(1)取消车尾保持。依据《列控系统相关规范补充规定》(铁总运[2016]222号),通过取消UUS码区段发车ATP车载设备由部分模式转入完全模式时车尾保持功能的方式[11],可提高侧线停开列车的出站速度,进而提高列车出站通过能力。优化前,ATP以部分模式发车,允许速度为45 km/h;当列车越过出站信号机并收到出站应答器有源报文时,ATP转入完全模式控车,列车执行完成45 km/h的尾部保持,允许速度提高至80 km/h。优化后,列车越过出站信号机时ATP由部分模式转入完全模式,将直接取消45 km/h的尾部保持,允许速度从45 km/h提高至80 km/h,从而减少出站运行时间。按16辆编组列车计算,优化后,列车的走行时间可压缩15 s,实现了线路通过能力的提高。
(2)优化站内停车制动曲线。以列车在终到站实现站内停车的场景为例,优化前的CTCS2-200C型列控车载设备站内停车曲线示意图如图2所示。优化前,移动授权终点距离出站信号机35 m,当列车进站运行至信号机外方70 m位置时,计算得到的允许速度不满足列车继续运行的要求,且部分车站停车标位置在信号机外方70 m左右,ATP允许速度较低,影响司机对标停车。

图2 CTCS2-200C型列控车载设备站内停车曲线示意图Fig.2 Parking braking curve of CTCS2-200C onboard train control equipment in station
为尽可能地减少ATP变更对现场的影响,在不改变曲线算法前提下,将移动授权终点至出站信号机的距离从35 m调整为25 m,研究CTCS2-200C制动曲线优化前后不同型号列车的允许速度提升空间。
取线路坡度为0‰,采用ATP制动曲线仿真软件计算CTCS2-200C制动曲线优化前后不同型号列车的允许速度对比如表3所示。由表3可知,当站内对标停车距离缩短后,相同位置下的ATP允许速度得到提升,有利于提高司机对标停车效率,如CRH5型动车组距离信号机70 m处的ATP允许速度由2.1 km/h提升至5.2 km/h。

表3 CTCS2-200C制动曲线优化前后不同型号列车的允许速度对比Tab.3 Comparison of allowable speed of different trains before and after optimization of CTCS2-200C braking curves
以列车CRH5-036为例,CTCS2-200C制动曲线优化前后在实际环境下的列车允许速度提升如表4所示。由表4可知,优化后,列车站内对标停车的允许速度提升效果明显,如哈大线哈尔滨西站(东场)的列车侧线停车时,停车点至出站信号机距离为74 m,允许速度由9.5 km/h提升至13.3 km/h。

表4 CTCS2-200C制动曲线优化前后在实际环境下的列车允许速度提升Tab.4 Comparison of allowable speed increase in actual environment before and after optimization of CTCS2-200C braking curves
(3)对比不同型号列控车载设备制动效率提升空间。取线路坡度为0‰,分别对比3种型号列控车载设备在车辆制动距离和设备自身制动距离上的差异,CTCS3-300T型列控车载设备制动距离与车辆制动距离对比如表5所示,CTCS3-300S型列控车载设备制动距离与车辆制动距离对比如表6所示,CTCS3-300H型列控车载设备制动距离与车辆制动距离对比如表7所示。制动效率取值为车辆常用制动距离与列控车载设备常用制动距离的比值。

表5 CTCS3-300T型列控车载设备制动距离与车辆制动距离对比Tab.5 Comparison of braking distance between CTCS3-300T onboard train control equipment and vehicle braking distance
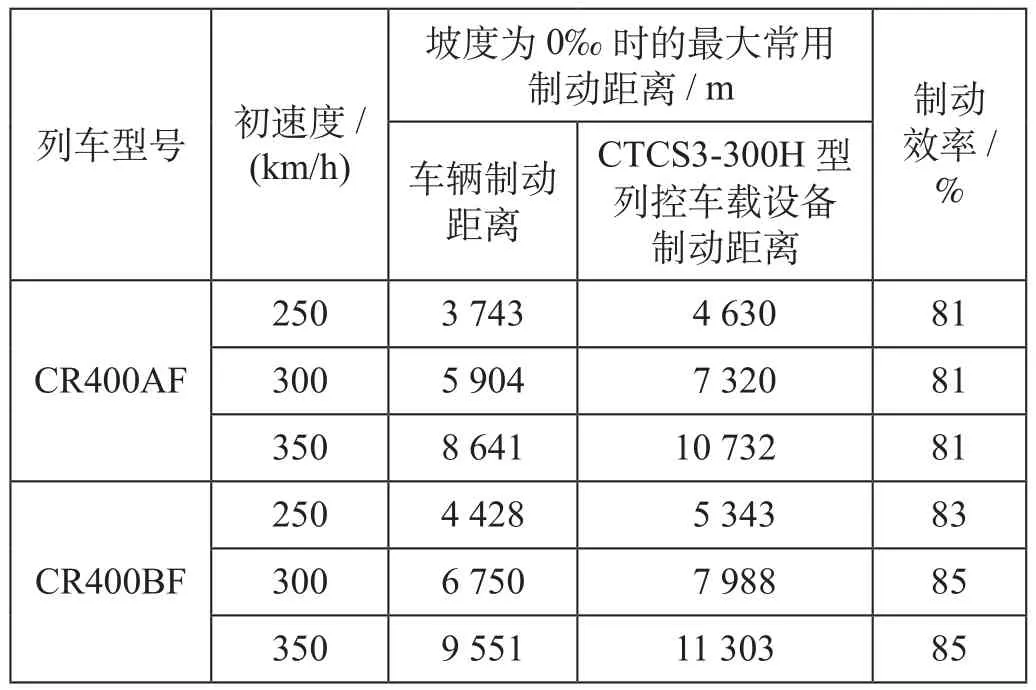
表7 CTCS3-300H型列控车载设备制动距离与车辆制动距离对比Tab.7 Comparison of braking distance between CTCS3-300H onboard train control equipment and vehicle braking distance
由表5可知,对于CTCS3-300T型列控车载设备,列车厂家要求ATP制动减速度不突破车辆减速度的90%,时速350 km不同列车型号下的CTCS3-300T型列控车载设备制动效率分别为80%(CRH380BK)和81% (CR400BF),这表明目前该型列控车载设备已在保证安全的前提下充分地利用了车辆的制动性能,如果车辆制动参数不发生变化,列控车载设备制动曲线进一步优化的空间不大。
由表6可知,CTCS3-300S列控车载设备在C3和C2工作等级下的制动效率均为80%左右,在保证安全的前提下,如果车辆制动参数不变,ATP难以进一步进行制动距离优化。
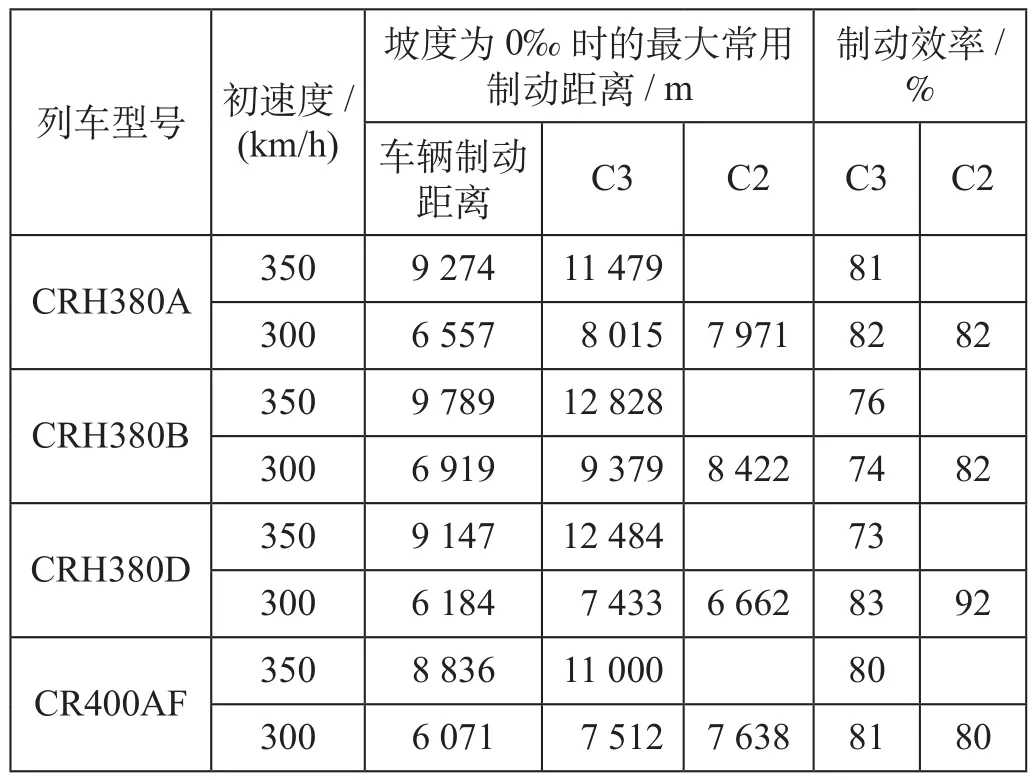
表6 CTCS3-300S型列控车载设备制动距离与车辆制动距离对比Tab.6 Comparison of braking distance between CTCS3-300S onboard train control equipment and vehicle braking distance
由表7可知,CTCS3-300H列控车载设备的制动效率大于80%,ATP计算出的制动距离相比前2种列控车载设备型号更接近列车厂家提供的制动距离,在保证安全的前提下,如果车辆制动参数不变,ATP难以进一步进行制动距离优化。
因此,列车制动参数不变的情况下这3种设备的ATP制动曲线优化空间不大;如果在不改变制动模型的前提下进一步优化这3种设备的ATP制动曲线,那么需要结合列车厂家的制动参数优化,在ATP中进行制动参数调整。
3 咽喉区通过能力提升效果研究
以CTCS3-300H型列控车载设备为例,采用ATP制动曲线仿真软件验证ATP制动曲线优化对高速铁路通过能力的提升效果。
(1)咽喉区通过能力仿真所采用的ATP制动曲线对比分析。取线路坡度为0‰,限制速度为350 km/h,制动参数分别按制动距离较长的CR400BF型列车和制动距离较短的CR400AF型列车进行取值,CTCS3-300H型列控车载设备对CR400BF型和CR400AF型列车的制动曲线如图3所示。由图3可知,从速度350 km/h制动到列车完全停车,配置CR400BF型列车制动参数时,CTCS3-300H型列控车载设备的常用制动距离为11 303 m;配置CR400AF型列车制动参数时,常用制动距离为10 732 m。因此,将CTCS3-300H型列控车载设备的制动参数由CR400BF型列车制动参数优化为CR400AF型列车制动参数,可缩短从速度350 km/h制动到列车停车的制动距离为571 m,有利于提高线路通过能力,为进一步仿真计算将制动参数由CR400BF型列车制动参数优化为CR400AF型列车制动参数的咽喉区通过能力提升指标奠定了基础。
(2)京沪高速铁路上海虹桥站咽喉区通过能力变化研究。ATP制动曲线优化对车站接车和通过进路占用时间有直接影响。为了考察制动曲线优化对高速铁路通过能力瓶颈枢纽站咽喉区[12-13]的通过能力提升效果,选择京沪高速铁路上海虹桥站的咽喉区作为研究对象,在京沪高速铁路最高时速为350 km的条件下,将制动距离较长的CR400BF制动参数优化为制动距离较短的CR400AF制动参数,研究ATP制动曲线优化后的咽喉区通过能力提升情况。
仿真得到的ATP制动曲线优化前后的上海虹桥站接车进路道岔组最小占用时间如表8所示。在表8中,道岔组1—6为根据文献[12]对上海虹桥站下行咽喉区道岔的分组;方案1为优化前仿真结果,采用CR400BF制动参数;方案2为优化后仿真结果,采用CR400AF制动参数。
采用利用率法计算咽喉区通过能力,按道岔分组计算每个道岔组的通过能力利用率,利用率最大的道岔组即为咽喉道岔组,反映咽喉区通过能力利用情况。咽喉道岔组的通过能力利用率K的计算公式为

式中:T占用为道岔组占用时间,min,高速铁路采用分段解锁方式,不同道岔组所在轨道电路的解锁时间存在差异;T固定为固定作业时间,min,按动车组运营时段(通常为6 : 00—24 : 00)取值360;r空费为空费系数,根据文献[12]取值0.2。
根据表8,计算ATP制动曲线优化前后的上海虹桥站接车进路道岔组通过能力利用率如表9所示。

表8 ATP制动曲线优化前后的上海虹桥站接车进路道岔组最小占用时间Tab.8 Minimum occupancy time of receiving route turnout at Shanghai Hongqiao Railway Station before and after optimization of ATP braking curves

表9 ATP制动曲线优化前后的上海虹桥站接车进路道岔组通过能力利用率Tab.9 Carrying capacity utilization of receiving route turnout at Shanghai Hongqiao Railway Station before and after optimization of ATP braking curves
ATP制动曲线优化后,上海虹桥站咽喉区各道岔组的通过能力均有提升,利用率最大的道岔组为道岔组1,通过能力利用率从66.06%提升至63.49%,在当前列车开行方案下,优化后咽喉道岔组节省的占用时间可额外增开列车5列,咽喉区通过能力提升效果为4.05%。
4 结束语
从跨专业技术融合的角度,利用列控车载设备制动曲线优化的视角研究咽喉区通过能力利用率,从取消车尾保持、优化站内停车制动曲线和对比不同型号列控车载设备制动效率提升空间3个方面提出列控车载设备制动曲线优化方案,在分析列控车载设备制动距离与车辆制动距离的差异性基础上,以京沪高速铁路上海虹桥站的咽喉区作为研究对象,分析在京沪高速铁路列车最高速度为350 km/h条件下,仿真计算ATP制动曲线优化前后的咽喉区通过能力变化情况。结果表明:采用CR400AF制动参数的CTCS3-300H型列控车载设备性能更优,相对于采用CR400BF制动参数的CTCS3-300H型列控车载设备,前者可提升上海虹桥站咽喉区通过能力4.05%。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2020年9期)2020-02-06
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2018年4期)2018-06-06
