便携式高精度六自由度运动光学测量系统的研究
2022-12-14 08:27杨闻宇马科元陈炜鹏刘春嵘
兵器装备工程学报 2022年11期
杨闻宇,马科元,陈炜鹏,刘春嵘
(厦门理工学院 土木工程与建筑学院, 福建 厦门 361024)
1 引言
在船舶、浮式海洋平台及浮式海上旅游平台等的研发过程中,往往需要进行物理模型实验,测量模型的运动响应,即空间 3个方向的直线运动和绕 3个轴的转动[1-4];在土木工程测量中,给出地形的垂直标高及水平坐标是工程设计、施工和监测的重要依据[5];在动力定位、飞行器、潜艇等的研发和试制过程中,需要对待测对象的运动轨迹及运动姿态进行监测[6-7]。这些工程实例中的测量问题可归纳为2类:① 对待测对象上特征点的空间坐标进行识别;② 物体六自由度运动的测量。
传统的检测方法是利用直尺测量位移值,使用陀螺仪测量摇角,通过光线示波仪记录信号人工读取分析,精度低,浪费人力物力,无法满足使用要求。随着数字图像处理技术和机器视觉技术的发展,采用CCD摄像机抓取图像,利用计算机进行处理的非接触测量己经得到了广泛的应用[8-12]。非接触式六自由度监测系统在国内尚无产品,比利时Krypton 公司研制的RDOYM 6D实时测量系统具有测量精度高、测量速度快等特性,但该产品价格昂贵,设备维护费用高,且不适合远距离作业,因此在国内应用很少,比利时Krypton 公司的K600系统见图1所示。

图1 比利时Krypton公司的K600系统实物图
国内在此方面的研究仍处在室内模型实验阶段。其主要方法分为2种:一种是应用位置测量仪(PSD)及红外线发光源(LED)进行测量,得到固定在模型上3 个点的9 个空间坐标,然后计算出模型的6个自由度运动参数(3 个模型重心线位置,3 个模型角位移)[13-14]。这种方法所需设备较多,且待测物的运动有一定的限制;第二种方法是利用触发器相连的2台CCD进行测量,主要是利用计算机视觉的相关原理[15]。
在现有的测量方法中,由于镜头方位是随意设置的,每次使用过程中都需要对镜头位置进行标定,给使用带来了不便。为克服这种不便性,本研究中提出一种便携式六自由度运动光学测量系统,通过镜头架将2个CCD相机集成固定,在使用过程中无需标定,并考虑镜头的安装误差,引入二阶精度进行修正,提高了测量的精度。该系统采用图像处理的方法对待测对象上的特征点进行识别,给出其空间坐标,根据刚体运动学理论获得物体六自由度运动的信息。
2 六自由度光学运动测量系统的开发
六自由度光学运动测量系统的硬件(见图2)主要包括:① 双目CCD相机及相关图像采集卡;② 坐标架;③ 采集电脑。根据不同的测量要求,可选择不同型号的CCD相机。

图2 六自由度光学运动测量系统的硬件实物图
CCD相机及相关图像采集卡可购买现有产品,无需开发。坐标架用于安装和固定CCD相机。坐标架需要自行设计、加工或组装。电脑可采用笔记本或台式机,用于进行图像采集和数据处理。
六自由度光学测量系统软件包括5个模块:① 图像采集模块、② 图像识别模块、③ 特征点空间坐标计算模块(包括:单镜头模组的计算模块、双镜头模组的高精度计算模块)、④ 刚体运动分析模块、⑤ CCD镜头位置参数标定模块。
3 测量原理
3.1 空间点坐标计算
空间点坐标计算中,需要定义不同的坐标系:镜头架坐标系和CCD图像像素坐标系,如图3所示。设亮点i在2个CCD图像中的像素坐标分别为(x′1,y′1),(x′2,y′2),亮点在CCD1镜头架坐标系下的空间坐标(x1,y1,z1),在CCD2镜头架坐标系下的空间坐标(x2,y2,z2)。则(x1,y1,z1)与(x′1,y′1)及(x2,y2,z2)与(x′2,y′2)的关系为
(1)
(2)
(3)
(4)
其中:f为镜头焦距;f′为像平面到焦点的距离;W为图像的宽度;H为图像的高度;μ为CCD芯片上一个像素点的尺寸(单位:μm/像素)。
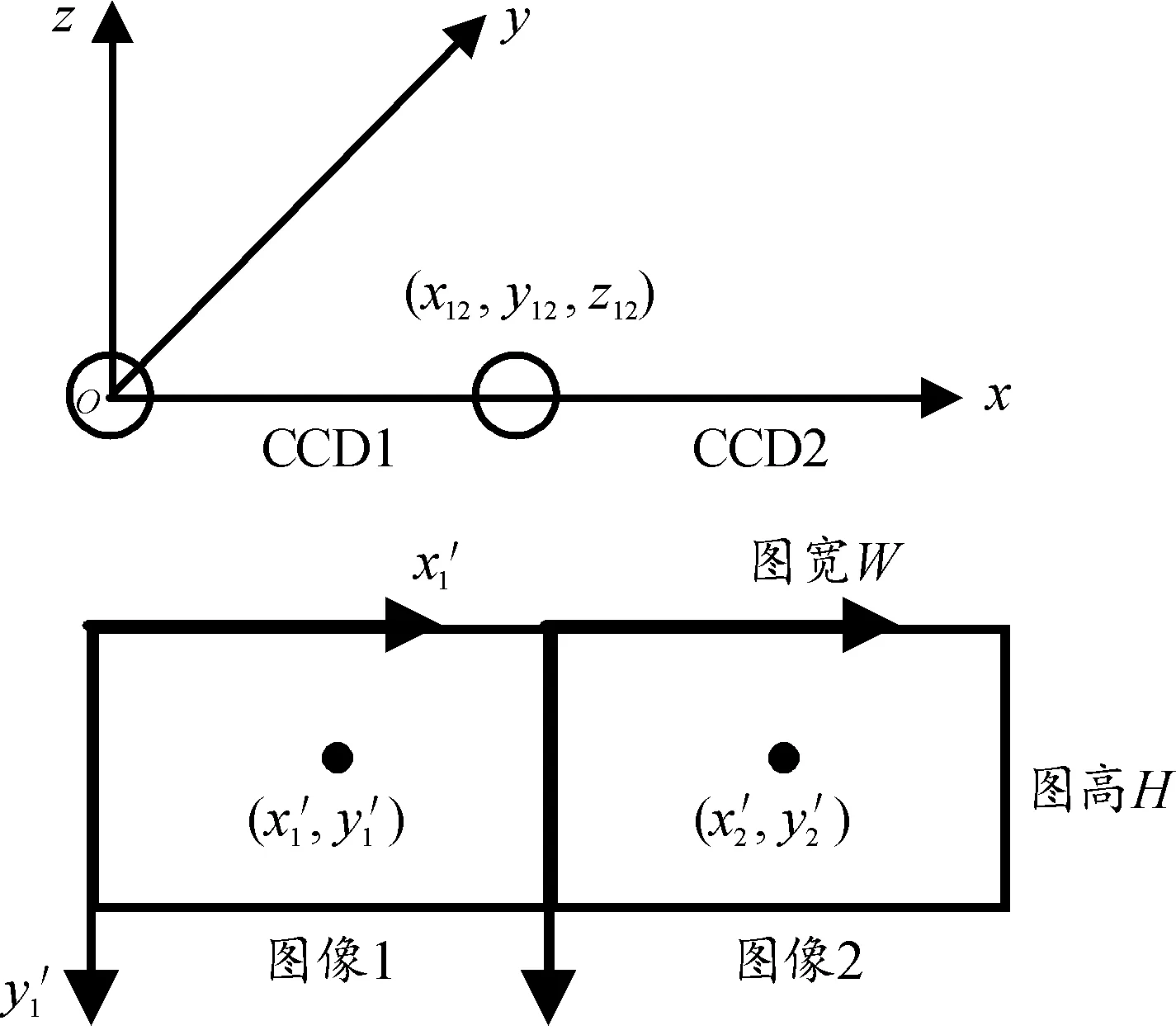
图3 空间坐标计算坐标系示意图
若认为两镜头没有安装误差,则,可得
(5)
式中:x12和y12为CCD2镜头中心坐标。其他系数如下列表达式,i、j、k为对应镜头架坐标轴的单位向量,下标1代表镜头架1,下标2代表镜头架2。
a11=i1·i2,a12=i1·j2,a13=i1·k2
a21=j1·i2,a22=j1·j2,a23=j1·k2
3.2 刚体六自由度计算
在刚体上标记4个空间点:P1,P2,P3,P4。在测量时,要保证四点不共面,且4个点组成的四面体不是正四面体。P1,P2,P3,P4在镜头架坐标系(x-y-z-O)下的坐标值可由2幅CCD图像测量得到,即P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3),P4(x4,y4,z4)。则4个空间点的坐标可表示为刚体质心坐标(xc,yc,zc)和转角(θx,θy,θz)的函数。θx为横摇角,θy为纵摇角,θz为艏摇角。在初始状态下假设给定下一个时刻刚体运动的平动和转角,则根据刚体运动学理论可计算刚体运动后4个空间点的坐标,写成如下的函数,
xi=fxi(xc,yc,zc,θx,θy,θz)
(6)
yi=fyi(xc,yc,zc,θx,θy,θz)
(7)
zi=fzi(xc,yc,zc,θx,θy,θz)
(8)
式中,i=1,2,3,4。

(9)
则ε可表示为刚体质心坐标(xc,yc,zc)和转角(θx,θy,θz)的函数。
ε=f(xc,yc,zc,θx,θy,θz)
(10)
求ε的极小值所对应的xc,yc,zc,θx,θy,θz值,即为刚体六自由度运动的线位移和转角。
4 系统测试与分析
4.1 系统精度对比验证
为验证六自由度光学运动测量系统的测量精度,对一刚性浮式平台模型(见图4)的运动响应(转角)进行了测量,并与HEC699动态角位移传感器(无锡慧联信息科技有限公司)的测量结果进行了对比。该传感器通过优化的扩展卡尔曼滤波算法,实时输出高精度姿态信息。其产品参数如下:俯仰精度和横滚精度均为动态0.5°、静态0.2°RMS;倾斜分辨率为0.01°;倾斜范围为俯仰±90°、横滚±180°。

图4 测试用矩形浮式平台模型实物图
实验所用测试平台的外形尺寸为:0.63 m(长)×0.20 m(宽)×0.12 m(高),测试时放入静水水槽中,以长度方向为纵向,宽度方向为横向。由于所选传感器仅能给出俯仰(纵摇)角及横滚(横摇)角,因此主要验证了浮式平台模型相应倾角的测试精度,具体工况见表1所示。
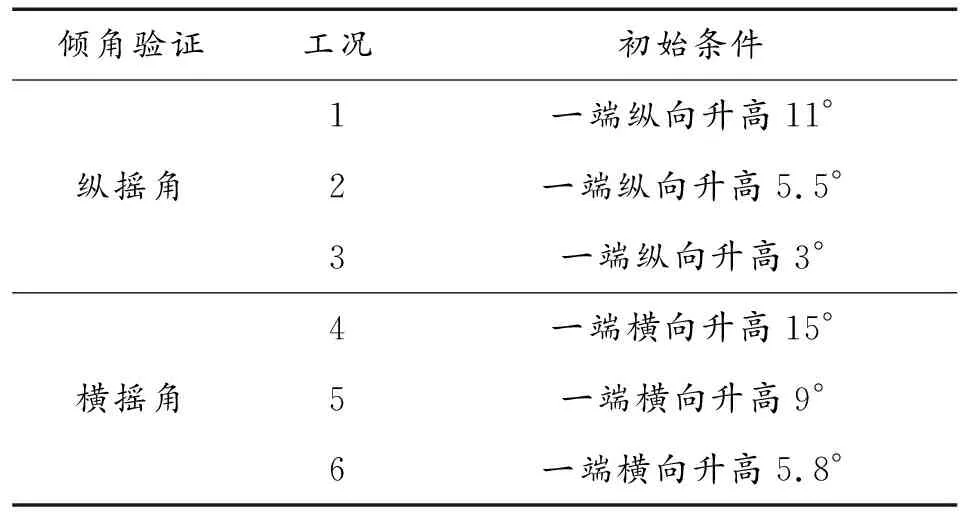
表1 实验工况
图5和图6分别为角位移传感器和六自由度光学测量系统纵摇角和横摇角测量结果比较。可以看出,六自由度光学测量系统和角位移传感器的测量结果较为吻合,说明该六自由度光学测量系统的测量精度可以保证。
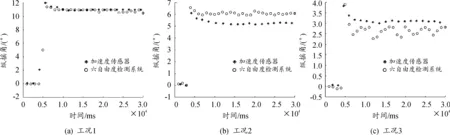
图5 角位移传感器和六自由度光学测量系统纵摇角测量结果曲线
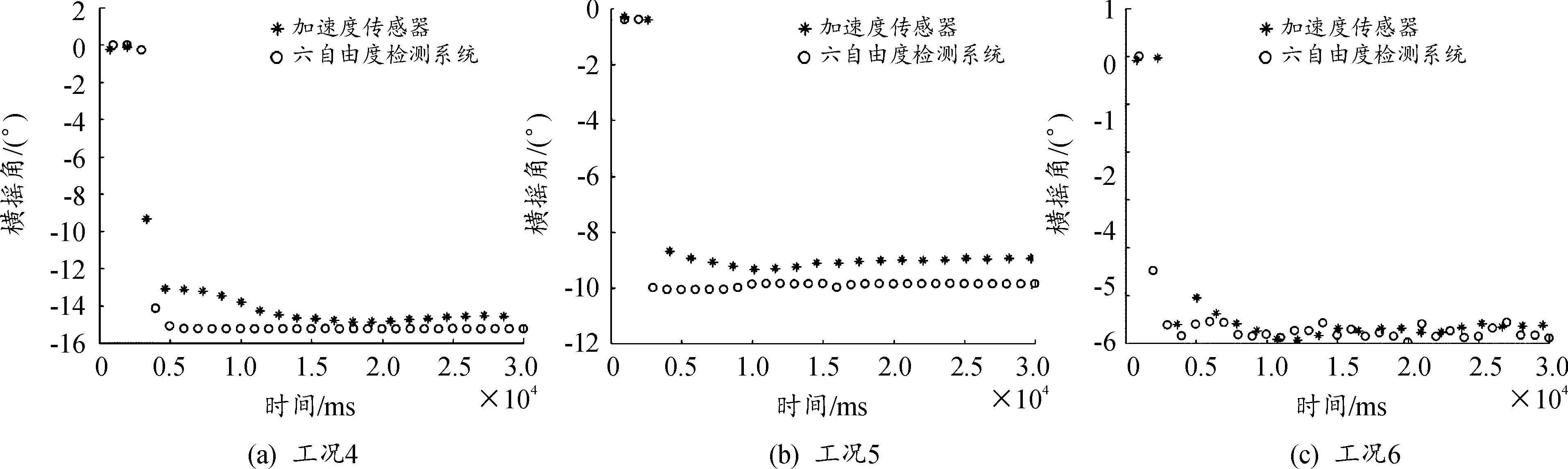
图6 角位移传感器和六自由度光学测量系统横摇角测量结果曲线
通过6种工况的测试,发现工况2和3中六自由度光学测量系统测量结果存在0.5°左右的波动,而在其他工况中并没有出现,这是由于光线的波动对图像采集造成的影响,且这种波动为绝对值,在大角度的测试中影响较小。
观察以上6种工况发现,角位移传感器测量结果较六自由度光学测量系统存在一定的响应滞后,且有一定的漂移值,这是由于角位移传感器采用陀螺仪进行测量。在上述6个工况中角位移传感器和六自由度光学测量系统测量结果存在最大0.5°左右的差值,这其中角位移传感器自身存在0.5°左右的误差,六自由度光学测量系统存在0.5°的波动值。因此认为此差值由角位移传感器自身的误差和六自由度光学测量系统自身误差组成。由于六自由度光学测量系统采用光学非接触测量,会因光线的变化对测量结果造成影响。由于2种因素混合,认为六自由度光学测量系统的测量精度在0.5°~1°之间,且运动响应识别较为快速。
4.2 浮式平台的运动响应测量
本实验是在厦门理工学院的波浪水槽中进行,该试验水槽总长35 m、宽0.7 m、高0.8 m。实验中静水深度为0.5 m,图7给出了水槽中设备和浮体模型布置。
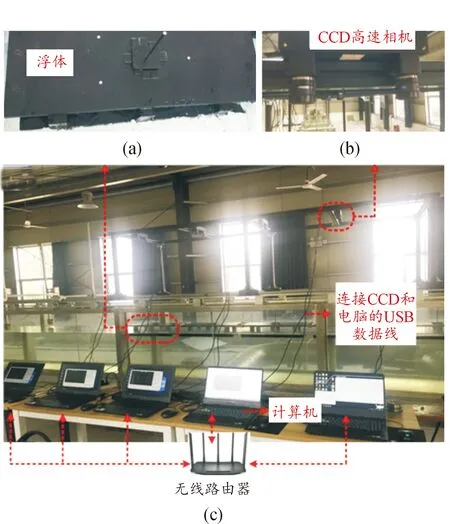
图7 浮式平台运动响应测量实验布置示意图
首先将浮体表面喷涂为黑色以方便识别图像中的白色光标点,然后在浮体模块上甲板面标记3个光标点,最后在浮体上表面的中心位置安装杆,第4个光标布放在杆的顶端,如图7(a)所示。每个浮体上表面安装有2个CCD摄像机(如图7(b)所示)同时采集各光标点的图像信息。图像中的白色点表示各光标点的位置,可以很容易从黑色背景中识别出来。从2个CCD摄像机所采集的图像中获得光标点中心位置的像素坐标,基于光标点像素坐标值可以得到所有标记点的三维空间坐标(x,y,z),通过坐标转换得到浮体模块质心处的六自由度运动响应(纵荡、横荡、垂荡、横摇、纵摇和艏摇)。
为实现多刚体运动的同步测量,采用局域网将多台采集电脑进行连接。其中的1台电脑为主控机,由主控机发出采集命令,其他电脑开始采集。开发了同步测量软件,实现了同步打开摄像头和同步开始采集功能。
图8给出了波高0.03 m周期0.7 s的规则波作用下,其中一浮式平台的六自由度运动的测量数据。通过实验数据可知,浮式平台在该波浪条件下,纵摇角运动幅值约为0.067 rad,横摇角幅值约为0.012 rad,艏摇角幅值约为0.005 rad,横荡幅值约为2 mm,纵荡幅值约为9.5 mm,垂荡幅值约为5.2 mm。当测量不同波高或周期条件下的浮式平台运动数据,可对单个浮式平台的运动响应进行对比研究。通过同步测量系统的开发,亦可进行多个浮式平台的运动响应对比研究。

图8 浮式平台的6自由度运动实测曲线(波高0.03 m,周期0.7 s)
5 结论
1) 通过与角位移传感器的实验测量对比,验证了本文中提出的六自由度运动光学测量系统能够达到较高的测量精度,测量误差在0.5°~1°;
2) 通过对浮式平台运动响应的实测证明,该系统结构简单,操作便利,使用过程无需标定,采集分析速度快,可满足实际测量的要求。
除物体六自由度运动测量外,该系统可进一步开发,用于地形坐标、桥梁位移、地基沉降、三维波面等领域的测量。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
机电信息(2021年17期)2021-07-01
内燃机与配件(2020年22期)2020-09-10
重型机械(2020年2期)2020-07-24
建材发展导向(2019年10期)2019-08-24
课程教育研究·学法教法研究(2018年14期)2018-08-11
光学仪器(2016年5期)2017-01-12
航天返回与遥感(2014年1期)2014-07-31
自动化博览(2014年12期)2014-02-28