面向动态MRO活动的SBOM演化研究
2022-12-13 07:16:28李婷玉
哈尔滨工业大学学报 2022年1期
李婷玉,刘 刚,高 琦
(1.山东大学 机械工程学院,济南,250061;2.山东大学 高效洁净机械制造教育部重点实验室,济南,250061;3.山东大学 机械工程国家级实验教学示范中心,济南,250061)
在企业向服务型制造模式转型的趋势下,服务化不断向制造业进行渗透[1],服务逐渐成为产品生命周期的重要环节之一[2]。MRO是服务阶段中进行的各种维修、维护和大修等活动的总称,是产品价值增长的重要来源[3]。
物料清单文件(Bill of Material ,BOM),是组织产品数据的一种有效方式,反映了产品的层次结构,也是产品服务数据管理的核心[4]。不少学者对MRO服务过程中的服务物料清单的构建进行了相关研究。任艮全[5]通过分析各类维修信息资源,提出了由中性物料清单、物理物料清单和实例物料清单组成的复合式维修BOM。Zhou C[6]提出了一种复合静态SBOM,实现了位置信息管理和可替代部件管理等MRO服务。针对复杂装备的检修服务,刘晓冰[7]提出了具有不同需求的3种检修物料清单结构。李浩[8]基于SBOM结构,构建了复杂产品MRO业务信息集成模型。Liu[9]基于维修部件的追踪性,定义了维修物料清单中三种特殊零件形式及转换规则。李玲[10]基于设备的工程物料清单(Engineering BOM ,EBOM)和服务需求,构建了复合式维修物料清单。
目前MRO服务中的SBOM研究主要集中于SBOM结构和EBOM向SBOM的转换过程,对于服务生命周期中SBOM的演化过程关注较少。对于飞机、机车等复杂装备而言,MRO活动的实施不仅需要产品设计、制造和维修相关知识和资料[11],同时活动实施过程中又会依据不同的服务需求产生动态多变的MRO服务记录[12],大大增加了MRO服务数据的管理难度。为了识别及追踪航空发动机大修过程中的服务活动,Hu[13]提出了三维配置管理模型。Shi L[14]以在役大型民用飞机为研究对象,分析各种飞机维修保障作业引起的构型特征变化,构建了在役飞机构型数据模型。李青[15]提出单机构型的追溯方法,实现了使用服务阶段中任一追溯时间点的飞机构型结构的获取。当前所研究的动态服务数据模型,一般只以单个产品为管理粒度,忽略了服务生命周期中不同粒度的管理需求。因此,建立面向不同管理需求和服务需求的产品服务数据模型是亟需解决的问题。
动态MRO活动实施过程中,一方面SBOM在不同管理需求下结构具有差异性,另一方面在不同服务需求下的SBOM变更类型也不同。本文基于动态MRO业务中产品的数据特点,定义了 SBOM的节点及节点间约束类型,用形式化的表达描述了不同类型SBOM间的演化关系模型、不同服务需求下SBOM的动态演化模型,并在此基础上提出了基于SBOM的两种MRO服务追溯机制,为动态MRO活动中的SBOM服务数据组织和追溯提供了理论模型。
1 动态MRO业务中的SBOM结构
1.1 节点和节点间约束的定义及分类
对于零件数量众多、结构复杂的产品而言,SBOM节点并非包括全部零件,例如螺栓、螺母这样的标准件不需要在SBOM中进行管理[6]。将产品在MRO服务过程中需要记录与管理的零件表示为SBOM的节点,需要关注的零件间的结构关系表示为SBOM的节点间约束。在服务过程中,一方面,零件装配位置或者供应商的差异性会造成MRO服务的不同,需要关注的零件结构关系也可能不同;另一方面,零件在不同MRO任务下可能会展现出不同的结构关系。因此从零件的装配位置、供应商以及MRO任务这三个方面出发,将SBOM的节点和节点间约束进行如下分类并给出定义:
定义1通用节点。通用节点表示MRO服务要求与装配位置无关的零组件。
定义2位置节点。位置节点表示MRO服务要求与装配位置相关的零组件,位置节点需要体现位置信息。
定义3可选节点。产品某位置处的可选节点表示该位置处允许装配的具有不同供应商来源的同类型零组件。
定义4通用约束。通用约束表示同类型零件在不同的装配位置和MRO任务中都需要关注的零件装配关系。
定义5可变约束。可变约束表示只在特定装配位置处的MRO任务中需要关注的零件装配关系。
1.2 面向不同管理需求的SBOM分类
SBOM是一种面向产品MRO服务的复合物料清单,管理产品初始静态属性数据和动态服务数据。即便同一批产品具有相同的初始状态,但是后续服务过程中产品的动态演化过程也可能不同,因此SBOM必须管理到单件产品。而单件产品在服务全生命周期中,需要进行多次MRO服务,不同MRO服务之间存在大量重复的基础数据,增大了服务数据的管理难度。为了提高MRO服务信息的重用性,减少MRO服务数据冗余,本文提出了管理批次产品的通用SBOM、管理单件产品的实例SBOM和管理单次MRO服务的任务SBOM,不同类型的SBOM间关联关系如图1所示。

图1 不同类型的SBOM间关联关系Fig.1 Relationship between different types of SBOM
1.2.1 管理批次产品的通用SBOM
通用SBOM节点关联的是批次产品与服务相关的共性信息,包括零件的三维模型、各类的维修规程和专用设备等。由于不同位置运行环境的差异性,具有相同设计要求的零件可能具有不同的服务标准,一般使用位置节点进行管理。根据共性服务信息与位置的相关性,将通用SBOM划分为中性BOM和位置BOM。中性BOM用于组织与位置无关的共性服务信息,位置BOM 用于组织与位置相关的共性服务信息。位置BOM是中性BOM的附加物料清单,在中性BOM的基础上,将位置节点进行拆分,如果零组件的MRO服务要求与装配位置均无关,则位置BOM不存在。同时考虑到服务过程中允装备件具有多种供应商来源,可能会产生不同成本,因而在通用SBOM中采用具有不同物料号的可选节点进行管理。
1.2.2 管理单件产品的实例SBOM
实例SBOM节点关联的是单件产品的个性服务信息,管理服务生命周期中的实物产品信息,记录和跟踪实物部件的MRO业务信息,为日常的检查、维护和跟踪提供依据。通用SBOM向实例SBOM转化的过程中,如果位置BOM存在,则以位置BOM为核心;如果位置BOM不存在,则以中性BOM为核心,依据制造履历选定允装备件的供应商,删去同位置处其他可选节点,同时获取零件的序列号、供应商和出厂时间,添加到通用SBOM节点中,将其转换为实例SBOM节点。一个通用SBOM可以序列化成多个实例SBOM。
1.2.3 管理单次MRO服务的任务SBOM
进行MRO服务时,由于产品运行状态的不同,会产生不同的服务需求,服务内容也不同。以某时刻实例SBOM的节点参数为输入数据,服务人员依据维修规程和实际业务需求实施MRO服务。任务SBOM用于管理单次MRO服务下需要关注的产品结构,涵盖了一次MRO服务的全部内容,包括服务内容、服务方法、服务所需的资源等,用于对MRO服务过程的指导。单次任务SBOM基于MRO服务需求,选定服务节点和节点间的可变约束,对实例SBOM进行部分映射而成。一个实例SBOM可以映射成多个任务SBOM。
2 不同类型的SBOM演化关系模型
2.1 通用SBOM的内部演化关系
通用SBOM包含产品全部的MRO服务范围,是产品服务生命周期的数据源头,采用三元组KG=〈PG,RG,CG〉进行表示,其中PG、RG、CG指通用SBOM中的节点、节点间约束和属性集合。通用SBOM节点p一般以物料号BMNp为标识符号,同一批次或型号的零件具有相同的物料号,节点p的数量为np,在产品通用SBOM中表示为(np)p,则节点集合PG可表示为∑{(np)p}。依据SBOM的节点分类,还可将PG表示为三种类型节点集合的并集,即PG=Psg+Psp+Psr,其中Psg表示通用节点集合,Psp表示位置节点集合,Psr表示可选节点集合。RG指零件间的装配关系即节点间约束集合,依据SBOM的节点间约束分类,可将其表示为通用约束集合Rsu和可变约束集合Rsc的并集,即RG=Rsu+Rsc。节点p的装配约束关系为
Rp={rp|rp=
(1)
式中z1为节点p和节点pj的装配约束数量关系。当z1>0时,p是pj的父项;当z1<0时,p是pj的子项;当z1=0时,p和pj无父子关系。
因此通用SBOM中的节点间约束集合可以表示为
(2)
节点p的静态属性集合Cp中包含多种不同类型的属性cp,即Cp=∑{cp},则通用SBOM中所有节点的静态属性集合CG可表示为
(3)
将中性BOM表示为KGM=〈PGM,RGM,CGM〉,其中PGM、RGM、CGM指中性BOM中的节点、节点间约束和属性集合,可表示为
PGM=∑{(npm)p}
(4)
(5)
(6)
式中:npm指节点p在中性BOM中的数量,RMp、CMp指节点p在中性BOM中的节点间约束和通用属性集合。
位置BOM不仅继承了中性BOM结构,同时又将中性BOM中的位置节点进行拆分,并添加位置相关属性。位置BOM可以表示为KGP=〈PGP,RGP,CGP〉,其中PGP、RGP、CGP指位置BOM中的节点、节点间约束和属性集合,可表示为
PGP=∑{(npp)p}
(7)
(8)
(9)
式中:npp指节点p在位置BOM中的数量,RPp、CPp指节点p在位置BOM中的节点间约束集合和位置属性集合。
通用SBOM为中性BOM和位置BOM复合而成的物料清单,因此节点p在这三类BOM中的数量和属性的关联关系为
np=npm+npp
(10)
Cp=CMp+CPp
(11)
对于中性BOM中的任一位置节点p((np)p∈PGMand(np)p∈Psp,np∈N+),按照其位置管理要求,在位置BOM中需要将装配数量关系为|z2|(|z2|>1,z2∈Z)的p节点约束拆分成|z2|个装配数量关系为1的p节点约束,则位置节点在中性BOM和位置BOM中的节点数量及节点间约束的关联关系为
npp=npm+|z2|-1
(12)
RMp={rmp|rmp=〈p,pj,z〉,p≠pj,(npj)pj∈PG,npj∈N+,|z2|>1,z2∈Z}
(13)
RPp={(|z2|)rpp|rpp=〈p,pj,1〉,p≠pj,(npj)pj∈PG,npj∈N+,|z2|>1,z2∈Z}
(14)
位置节点在通用SBOM、中性BOM和位置BOM中的节点间约束的关联关系为
Rp=RMp+RPp
(15)
而对于中性BOM中的非位置节点p((np)p∈PGMand (np)p∉Psp,np∈N+),其在中性BOM和位置BOM中具有相同的节点数量和节点间约束:
npm=npp
(16)
RMp=RPp
(17)
非位置节点在三类BOM中的节点间约束关联关系为
Rp=2RMp=2RPp
(18)
2.2 通用与实例SBOM间的演化关系
实例SBOM在通用SBOM的基础上,根据零组件的供应商确定可选节点的物料号,删去同一位置处的其他可选节点,并增加实例零件的序列号、零件剩余寿命等动态属性。实例SBOM节点可以看成是通用SBOM节点与实例零件的组合,以零件安装时间为关联关系,采用六元组KI=〈PI,RI,CI,PC,AC,T〉进行表示,其中PI、RI、CI表示单件与批次产品相同的节点、节点间约束和属性集合,PC表示实例SBOM中装配的实例零件集合,AC表示实例零件的动态属性集合,T表示实例SBOM的时间戳。p′表示节点p处安装的实例零件,以序列号USN为标识符号。通用SBOM中可选节点集合Psr包含了所有位置处的可选节点,可选节点位置数量为nsr,任一i(i∈Zand 1≤i≤nsr)项位置的可选节点集合Psr(i)为
(19)
式中:n(i)为第i项位置处可选的供应商数量,nsr(i)为第i项位置处的零件数量关系,节点psr(i,j)指第i项位置处由第j个供应商制造的零件。
可选节点集合Psr可看成是各个位置处的可选节点集合之和,表示为
(20)
初始实例化SBOM时,需要选定可选节点位置处的供应商,同时删去该位置处的其他可选节点。设定第i项节点位置处选用的零件由第j(i)(j(i)∈Zand 1≤j(i)≤n(i))个供应商提供,则通用SBOM与实例SBOM之间的关联关系可表示为
(21)
(22)
(23)
2.3 实例与任务SBOM间的演化关系管理
任务SBOM是根据MRO服务需求对实例SBOM进行部分映射而成,涵盖了单个产品的单次MRO服务的全部内容。每次任务执行后,实例SBOM会根据服务需求发生变更,因而任务SBOM也是会随着时间而改变的。进行MRO服务时,首先需要根据维修规程和产品状态确定此次MRO服务的范围以及内容。产品具有不同级别的MRO服务范围和深度,例如在机车小修时只需要检查转向架,而中修时则需要对转向架进行拆检,因而在不同的任务SBOM中具有不同的节点和节点间约束;而产品在不同时间段也会进行相同的MRO服务,不同的任务SBOM中也有相同的节点和节点间约束。为了提高MRO服务信息的重用性,构建了通用模板-实例模板-服务实例即CIS三层结构(Common Templet-Instance Templet-Service Instance)管理任务SBOM,如图2所示。
在以CIS结构为核心的数据管理模式中,通用模板是面向型号产品的,实例模板和服务实例是面向单件产品的。由于同一批次或型号的产品共用一套维修规程,因而具有相同的MRO服务,使用通用模板对这类MRO服务进行管理,对应着同型号的N个实例产品,并存储在通用模板库中。而单件产品具有使用环境多变、故障复杂的特点,可能会产生超出维修规程范围的MRO服务,例如附加检修等,因而同一批次或者型号的产品的MRO服务模式具有差异性,使用实例模板对实例产品的MRO服务进行管理。实例模板在通用模板的基础上,根据实际的MRO服务需求进行增删改,与实例产品是一一对应的关系,并存储在实例模板库中。对某个产品实施MRO服务时,可从该产品的实例模板库中获取相应的任务模板,并根据任务执行时间确定安装的实例零件,扩展实例属性,生成任务SBOM,并作为服务实例存储在服务实例库中。任务SBOM是对实例SBOM的部分映射,表示为KIT=〈PIT,RIT,CIT,PCT,ACT,TT〉,其中PIT、RIT、CIT、PCT、ACT、TT分别表示任务SBOM中的节点、节点间约束、静态属性、实例零件及其动态属性集合和任务时间戳,任务映射主要体现在节点和节点间约束上,可以表示为PIT⊆PI,RIT⊆RI。
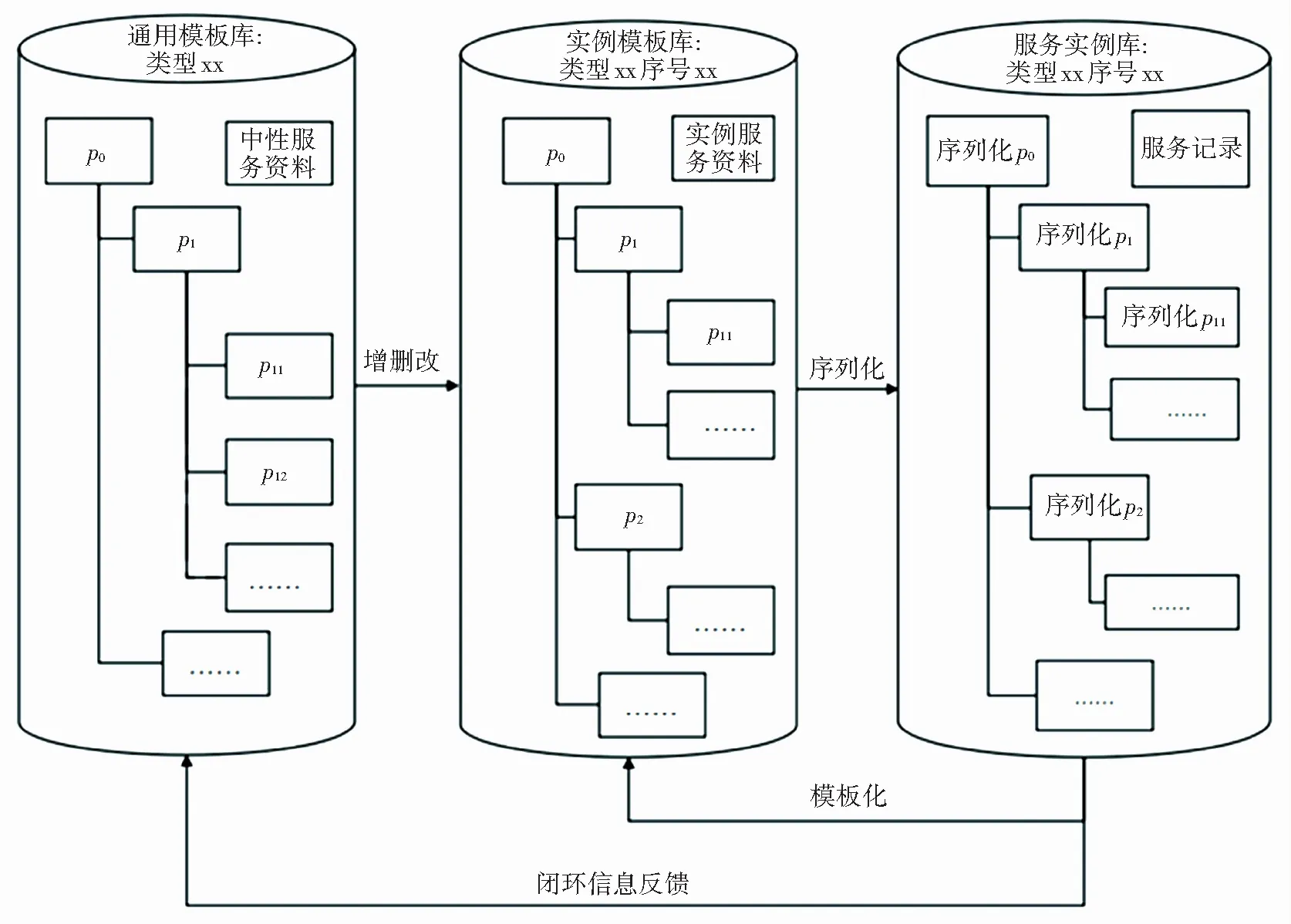
图2 基于CIS三层结构的任务SBOM的管理模式Fig.2 Task management mode of SBOM based on CIS three-tier structure
一个实例模板会产生N个服务实例,但是存在某些加改装任务由于初次实施找不到相对应的任务模板的情况,此时需要根据当前的MRO服务需求构建新的任务SBOM。而当该项任务执行次数过多时,经服务人员决策后,可以将其转化成实例模板,添加到实例模板库中。此外,生产厂家还可以根据实际的MRO服务情况,对维修规程中不合理的地方进行修改,并应用到同型号产品的MRO服务中去,从而改进该型号产品的MRO服务质量,实现MRO服务过程中的闭环信息反馈。
3 不同MRO服务需求下的SBOM动态演化模型
在服务阶段,MRO服务的实施会带来单个产品在结构、组成零件或者性能参数的改变。MRO服务需求一般分为维护、修复、更换和加改装四种,通过分析不同服务需求对产品结构关系和装配零件产生的影响,将SBOM节点的变更分成两种:第一种为节点和节点间约束的变更,该变更类型下通用SBOM和实例SBOM均发生了改变;第二种为实例零件及动态属性的变更,该变更类型下通用SBOM不变,实例SBOM发生了改变。对每一种变更类型下的节点状态进行分析,讨论不同节点状态下通用SBOM和实例SBOM的动态演化过程。
3.1 节点和节点间约束的变更
产品在投入使用后,会有较长的产品服务周期,使用环境也在不断发生变化。当运营商发现零部件或者软件版本不满足现有的使用要求时,会向生产商提出改装、加装或者软件升级的服务需求;或者是生产商通过产品的历史服务记录,发现重大的质量缺陷,对已经出厂的产品召回后进行设计结构或者生产工艺的更改服务。这类服务需求往往先由设计人员评定分析,对产品的设计制造结构或者属性进行更改后,再调整通用SBOM的产品结构、零件属性和维修规程。由于实例SBOM是对通用SBOM的序列化,因此不仅节点的需求版本或节点间约束会发生改变,安装的实例零件的版本也会发生变化。在这种变更类型下,节点具有新增、删除和升版三种状态。

3.1.1 新增状态

3.1.2 删除状态

3.1.3 升版状态


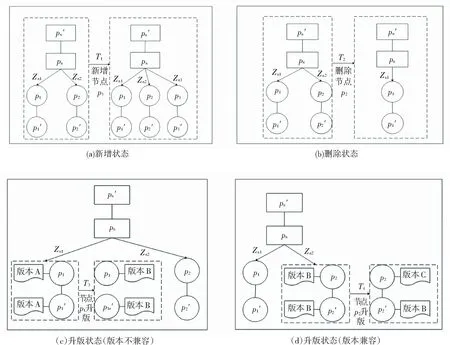
图3 节点和节点间约束变更类型下的节点状态Fig.3 Node status under node and inter-node constraint change types
3.2 实例零件及动态属性的变更
在对产品进行维护、修复和更换服务时,由于产品通用SBOM节点不会发生改变,因而其实例SBOM中的产品结构及零件静态属性也不会发生改变,该变更类型下只讨论实例SBOM中实例零件及动态属性的变化。节点具有修复和更换两种状态,而更换分为整体更换和拆卸更换,整体更换时,该组件及其所有子件都会同时发生变更,而拆卸更换只会更改部分子件。
3.2.1 修复状态

3.2.2 零件更换状态

3.2.3 组件更换状态

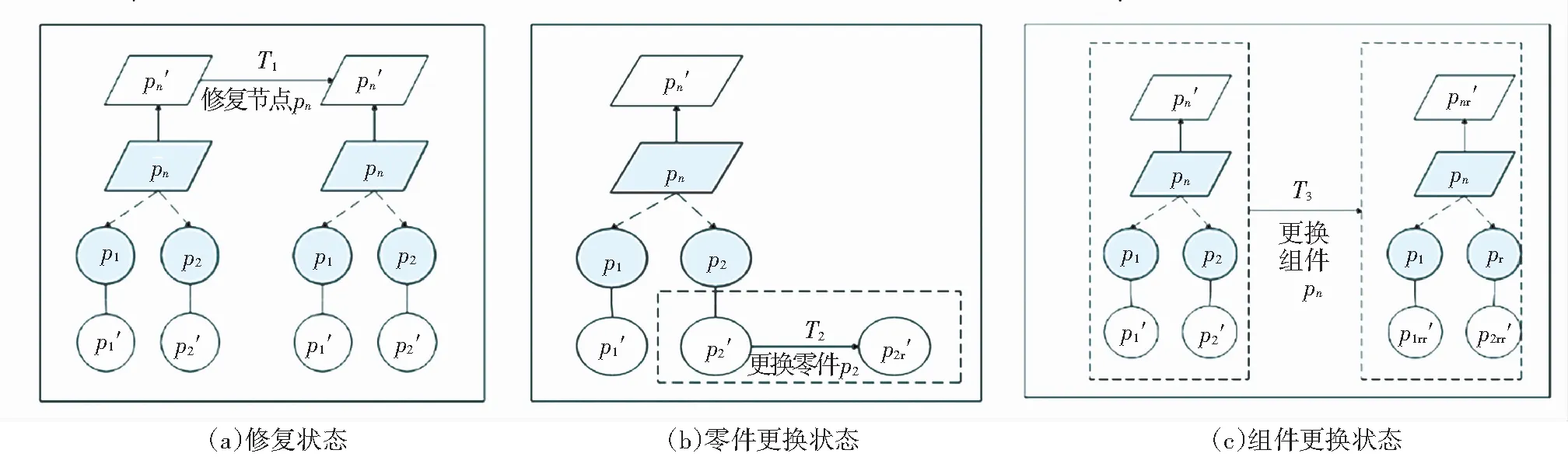
图4 实例零件及动态属性变更类型下的节点状态Fig.4 Example parts and node states under dynamic property change types
4 应用实例
基于上文对SBOM演化模型的研究,本文以某机车转向架的部分结构为例,描述产品服务生命周期中面向不同管理需求和服务需求的SBOM演化过程。其中,机车转向架的通用SBOM、实例SBOM和任务SBOM结构及其之间的转换关系如图5所示。
对于部分关键节点,需要对其整个服务生命周期进行管理,要求能快速追溯到该节点处特定时间安装的实例零件以及实施的MRO活动,实现MRO服务追溯。服务追溯一般是基于实例SBOM而言,依据节点追溯目的本文定义了两种MRO服务追溯机制:
1)节点在特定时间点t0安装的实例零件追溯。依据追溯节点的物料号BMN和t0,基于实例SBOM结构,确定该时刻安装的零件序列号USN。
2)节点在特定时间段[ts,te]的安装历史序列追溯。依据追溯节点的物料号BMN、开始时间ts和结束时间te,确定初始和末尾追溯时刻安装的实例零件序列号USNs、USNe,并沿着时间坐标生成该节点在此时间段的安装历史序列[tsUSNs…USNete]。
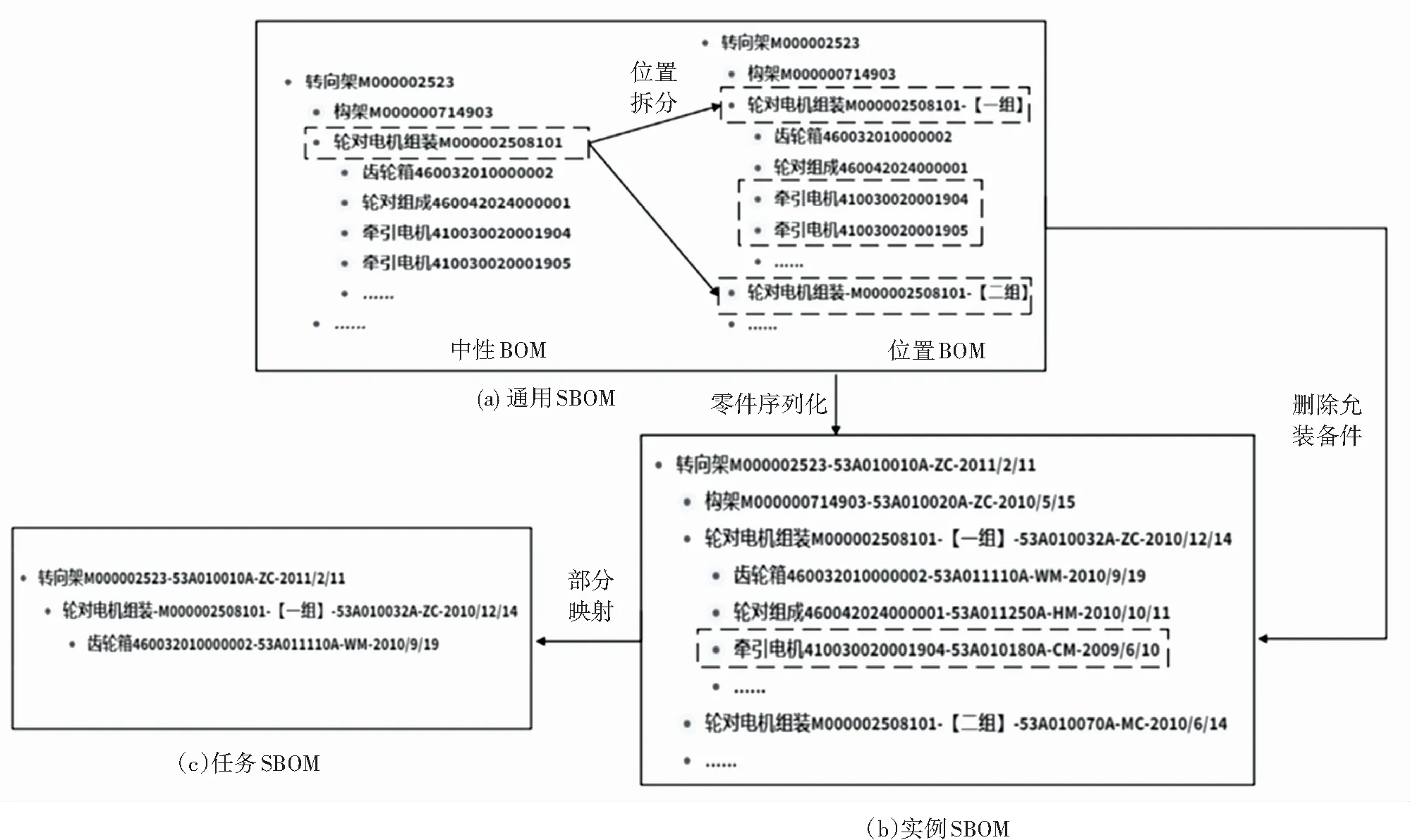
图5 面向不同管理需求的机车转向架SBOMFig.5 SBOM of locomotive bogie for different management requirements
本文以该机车转向架的实例SBOM在T0-T3期间的三次MRO服务下的动态演化过程为例,对MRO服务追溯机制进行验证。初始时刻T0时,机车实例SBOM结构如图6(a)所示。T1时刻,维修人员在出发前对机车转向架中的轮对电机组装一组进行齿轮油位的外观检查任务,该服务下的任务SBOM如图6(b)所示。通过检查发现齿轮油位较低,因此按照维修说明对齿轮箱进行了加油操作。该MRO服务下,齿轮箱节点为修复状态,加油后的机车实例SBOM结构如图6(c)所示。T2时刻,维修人员在日常检修时对机车转向架的轮对电机组装一组进行了拆检任务,需要将轮对电机拆下后再进行检查,该服务下的任务SBOM如图6(d)所示。检查后发现牵引电机故障,按照维修说明对该牵引电机进行了更换操作。该项MRO服务下,牵引电机节点为零件更换状态,其零件序列号及其他动态属性均发生了改变,而其他节点保持不变,更换后的机车实例SBOM结构如图6(e)所示。T3时刻,由于机车在运行过程再次出现了牵引电机异常的情况,维修人员再次对机车转向架的轮对电机组装一组进行了拆检任务,该MRO服务下的任务SBOM如图6(f)所示。为了避免再次出现异常情况,按照维修说明对轮对电机组装一组进行了整体更换。该项MRO服务下,由于更换了轮对电机组装一组,轮对电机组装一组的子件也会随之进行更换,因此轮对电机组装一组为组件更换状态,其子件为零件更换状态,两者的零件序列号及其他动态属性均发生了改变,整体更换后的实例SBOM如图6(g)所示。

5 结 论
本文通过分析动态MRO业务特点,定义了SBOM的节点和节点间约束,建立了不同类型SBOM间的演化关系模型,以及不同服务需求下的SBOM动态演化模型,并以某型号机车转向架为例进行了演化模型及MRO服务追溯机制的验证。演化模型将动态服务需求与产品结构结合起来,实现了SBOM对于动态MRO活动的支持,为复杂装备企业提供了产品服务生命周期中动态数据的管理方法。
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
加油站服务指南(2021年4期)2021-07-21 02:29:22
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
环球慈善(2019年6期)2019-09-25 09:06:24
人生十六七(2015年6期)2015-02-28 13:08:38
高中生学习·高三版(2014年3期)2014-04-29 06:11:18
高中生学习·高三版(2014年3期)2014-04-29 06:10:49
上海理工大学学报(2012年3期)2012-03-20 13:54:43