
机载气吸式抓取一体装置设计与试验
2022-12-08 17:03:26吴子彬吴志坤许绍聪余乃浩林嘉乐殷惠莉
现代计算机 2022年19期
吴子彬,吴志坤,许绍聪,余乃浩,林嘉乐,殷惠莉
(1.华南农业大学电子工程学院(人工智能学院),广州 510642;2.华南农业大学工程学院,广州 510642)
0 引言
无人直升机,因其结构紧凑、转场灵活、机动性和安全性高,且可以实现空中悬停、垂直起降等特点,在搜救、自然灾害监测等领域都有着广阔的应用前景[1-2]。然而当下国内对于无人机搜救抓取方面的研究尚不成熟,薛彩梁等[3]提出一种铁丝网抓取方案,虽然抓取面积大,但容易掉落。章东莞等[4]提出一种搜救抓取一体化无人机的方案设计,但传统机械手抓取不同形状物体难度大,作业效率低,且抓取精度不高。因此本文设计了一种机载半自动气吸抓取装置,该装置采用吸附吸盘接触抓取物体,可以克服物体形状问题,有效提高了精准度和作业效率。同时附有保护装置,确保物品不会因飞行姿态改变而掉落。
1 设计思路
无人直升机机载半自动气吸抓取装置主要由两部分构成,无人直升机与气吸机械抓手。无人直升机采用直升机为亚拓700级航模遥控直升机,该直升机在正常飞行中可以提供100 N~600 N 的力,因此可搭载10 kg~20 kg 的负载工作。气吸式机械抓手部分又分为主控系统、机械系统、视觉系统三个方面。在抓手部分搭建电控图传系统,上位机搭建视觉系统,使用图传设备实现超视距识别并实时回传视频,可直接在视觉系统界面采取手动点击画面,系统会把点击处的坐标信息以算法解读反馈给电控系统,电控系统读取坐标信息,得到物体在现实世界中位置距离信息,并控制机械部分完成搜索、拾取以及投放等相应任务。使其在灾害领域可以发挥安全、高效等作用。
2 主控系统
在控制系统中,双目摄像头通过图传模块将图像信息传输至计算机上位机端,上位机经过一系列信息处理,获得目标的坐标信息,并通过数传模块将信息发送至装置主控系统,主控系统分别对舵机、继电器、泄气阀进行操作以此控制机械手完成相应任务,控制示意图如图1所示。
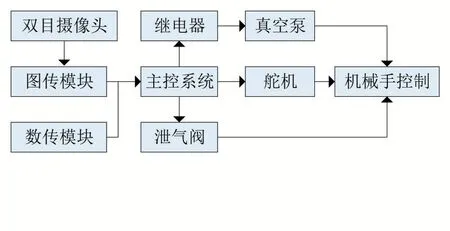
图1 控制示意图
3 机械部分
机械手的设计包括主体架、传动部分、机械爪三部分,完整建模图如图2所示。

图2 机械手的机械建模图
3.1 机械手主体架
主体架采用碳管以及三通铝管搭建,具有质量轻、强度高、耐腐蚀等特点[5],由于700级直升机施加给传动轴的扭矩不超过1000 N·m,所以在进行仿真分析时外部载荷施加的扭矩为1000 N·m。运用SolidWorks Simulation 进行静应力分析,得出传动轴受到的最小应力为4.154 N/m²,最大应力为6.677e+07 N/m²,仍小于碳纤板的拉伸强度3500 Mpa 和弯曲强度1700 MPa。故可以使脚架在无人机下保持稳定。
3.2 机械手传动部分
传动部分分为旋转部分和水平位移部分。抓取装置旋转结构设计机械手的旋转360°舵机直接驱动。在本设计中,舵机机身作为动力输出部分,机身与机械手整体固定一起转动。与舵机齿轮配合的舵盘直接固定在脚架支撑板上,这样更加充分利用有效空间,使系统更加紧凑,旋转结构的转动范围为-90°~+90°,即可覆盖全部抓取区域。
装置水平位移设计选用软传动设计方案。水平位移结构由四根8×12×850 mm 碳纤维圆管做导轨与结构框架,整个水平位移结构上层两个碳管和旋转结构固定,下层的两根碳管用来实行位移的导轨,导轨上装有一对直线轴承,可以在导轨上顺滑运动。机械手水平位移原理,皮带轮与皮带啮合,而皮带从结构框架一端起,经过压带轮,再环绕皮带轮3/4 圈,行成包角,再通过另一个压带轮回到框架另一端,相当于皮带与框架都相对静止,从正上方看,形成字母Ω。720°舵机带动皮带轮,皮带轮在皮带上的位移就是水平位移的距离。
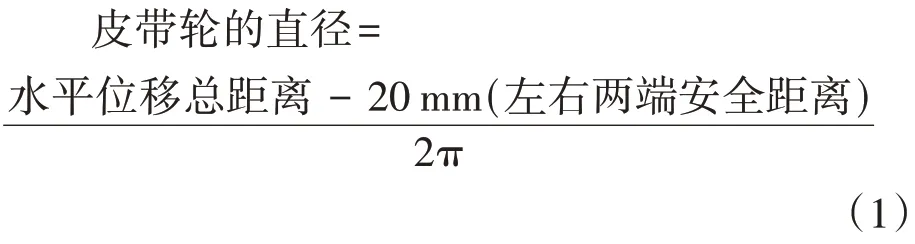
这样得出的皮带轮直径,从复位原点到最大移动距离舵机行程刚好为一圈。
3.3 机械爪抓取
该机械爪的抓取系统主要是由负压发生器、泄气阀、吸附吸盘、真空吸盘缓冲支架、气管、气动三通管组成。真空吸盘是气吸式抓取的执行结构。工作时首先将真空吸盘通过接管与真空泵接通,然后与待抓取物体等接触,此时泄气阀开始工作,真空泵开始抽吸,使吸盘产生负压,被吸材料将被牢固地抬起,可以开始移动被抓取物。当被抓取物体抓取成功时,升降系统到达上止点,泄气阀停止工作,使真空吸盘内由负气压变成零气压或稍为正的气压。由于重力被抓取物体就会脱离吸盘,从而完成了抓取和释放动作。
本设计中,五个真空泵分别对应五只吸盘,相互独立,因此在吸附抓取时即使个别吸盘未能与待抓取物体接触,也能完成抓取任务。并附加一个联动抓手结构,通过一个120°舵机、在下降过程中抓手张开,上升过程中抓手合拢,避免因飞行姿态的改变而导致抓取失败。抓取建模图如图3所示。
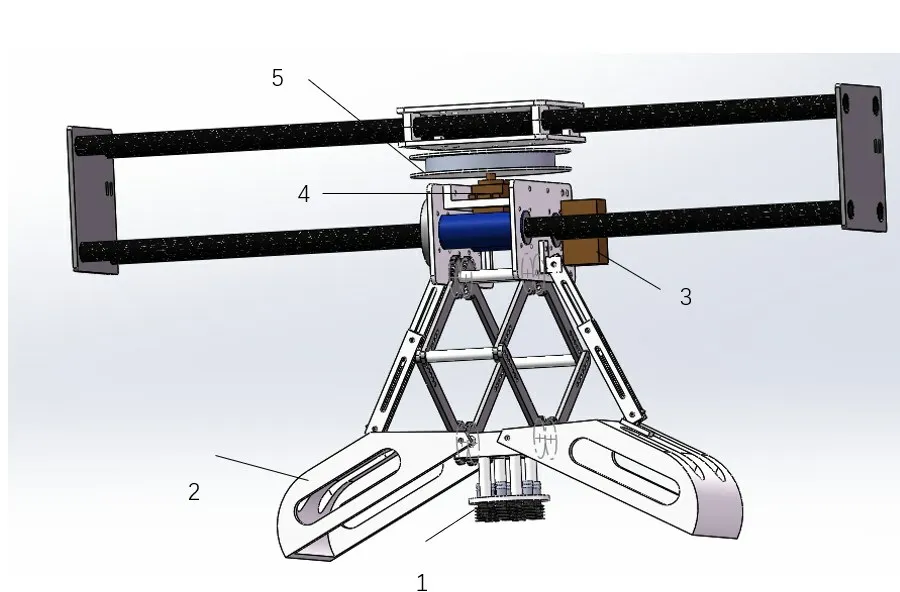
图3 机械手的抓取建模图
4 视觉系统
4.1 视觉处理流程
本文中,视觉系统需要实时显示图传的图像,并通过神经网络进行数字图像几何畸变矫正[6],计算机端根据图像建立直角坐标系,操作者点击位置后通过程序将其转化为极坐标,再发送指令控制机械手精准地抓取目标,流程图如图4所示。
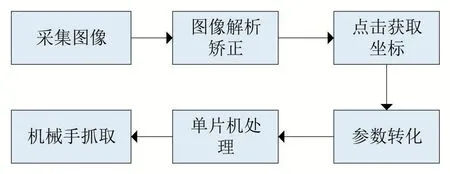
图4 抓取流程图
4.2 下位机端视觉系统搭建
下位机端在无人直升机脚架上构建电控图传系统,本文采用Ratel2 摄像头搭配PandaRC VT5802 图传,该搭配具有传输图像清晰、稳定、抗干扰能力强等一系列优点。具体硬件连接图如图5所示。

图5 硬件连接图
4.3 上位机端视觉系统搭建
上位机端的视觉系统搭建,要求能够与无人直升机上的电控图传系统通信,接收其发送的数据和图片,传输过程具有快速、实时、准确等特点。并且视觉系统需要友好的GUI 界面,方便操作者观察数据和发送指令,本文用Python 搭建上位机,利用Python 的serial 模块、QT和OpenCV库完成搭建。上位机界面如图6所示。
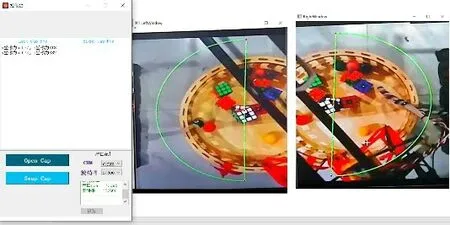
图6 上位机软件图
4.4 窗口点击参数转化
双目视觉可以从两个视点观察同一物体,然后通过三角测量原理计算图像像素间的位置偏差(视差)来获取景物的三维信息[7]。如图7所示,此时Xleft=Xright=Y,f是摄像机的焦距。由几何关系可得:

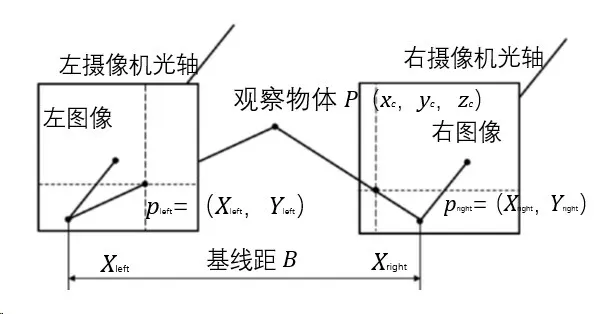
图7 双目视觉成像原理
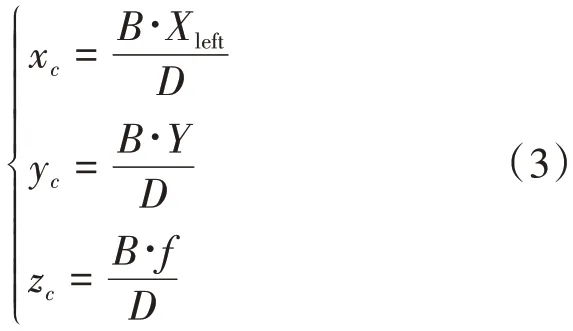
视差D=Xleft=Xright,由此可计算出特征点P在摄像机坐标下的三维坐标为
在视觉系统中,世界坐标与像素坐标是不同的,为了准确抓取该目标需要确定两者的关系[8]。需要对双目摄像机标定,本文采用张正友标定法,得到相机内部参数矩阵M1,外部参数矩阵M2,由如图8 所示的小孔成像模型,在摄像机的光轴中心建立坐标系。
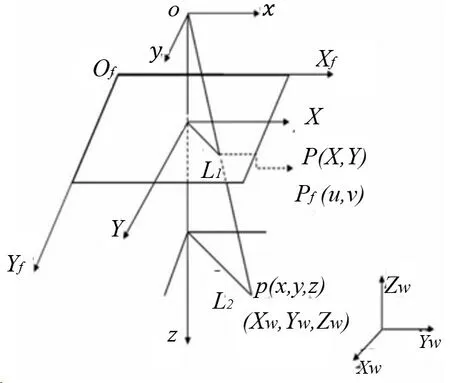
图8 小孔模型
其中xoy为相机坐标,XfOfYf为图像坐标,XOY为像素坐标,XWYWZW为世界坐标,各坐标系之间的转换关系如下。
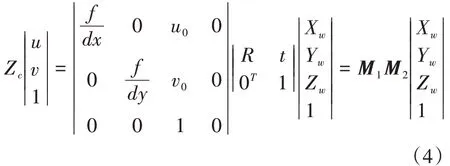
视觉系统坐标为(x,y)坐标系,机械手运动轨迹为极坐标,由以下公式进行转化。
5 机载机抓取试验
5.1 试验目的
实物制作完毕之后,对机械手进行试验测试,进行模拟搜救任务,验证直升机机载抓取的效果是否符合设计要求,并对试验过程中装置出现的问题进行进一步优化,为设计提供参考。
5.2 试验内容
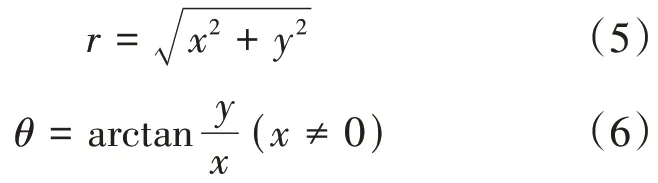
无人直升机从起降区起飞,飞行至救援物资存放区,领航员通过机载图像设备寻找、选定并自动拾取某一特定的救援物资(魔方与斯诺克彩球)。飞越障碍后将该救援物资投放给待救区内特定的待救对象,完成一趟搜救任务,试验现场图如图9所示。在规定时间内,循环试验抓取性能,试验设备稳定性与准确性。
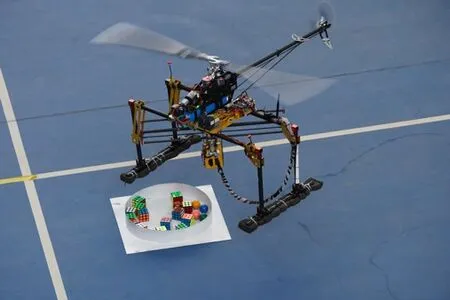
图9 试验现场图
5.3 试验数据
在5 min 内进行抓取试验,试验所得到的数据见表格1。
表1 模拟搜救试验数据
6 结语
本文设计了一种无人直升机机载气吸式抓取机械手,机械手满足抓取(吸取)类方体和球体以及不规则表面的物体,能够在各种恶劣环境下进行搜救任务。本设计对搜救机器人的研究和推广有一定的参考价值。试验结果显示,对机械手的结构和控制系统进行优化后,可以满足三维空间作业需求,机械手动作响应较快,误差较小,满足高精度快速运作的需求。
猜你喜欢
机械制造(2022年6期)2022-09-01 07:35:00
科技视界(2019年19期)2019-08-29 02:58:06
自动化学报(2019年6期)2019-07-23 01:18:36
新商务周刊(2018年12期)2018-12-08 23:34:06
航空模型(2017年12期)2018-05-08 11:00:48
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
航空模型(2016年5期)2016-07-25 08:59:26
舰船科学技术(2015年8期)2015-02-27 15:38:46
--关于材料发展史的对话
材料与冶金学报(2015年1期)2015-02-23 11:25:57
