基于RFID技术的电子围栏内施工人员行为预判与告警算法*
2022-12-07 09:17李小伟
广西科学 2022年5期
陈 楚,李小伟
(广西电网有限责任公司电网规划研究中心,广西南宁 530000)
在电子围栏施工中,施工环境比较差,现场施工人员的安全得不到保障,面对紧急事件发生的时候,不能及时通知现场施工人员,从而导致很多本可以避免的事故发生[1-3]。面对这种情况,对施工人员行为预判和及时告警是非常重要的。
在目前的研究中,工作人员可通过监控系统实时观察施工信息数据,了解施工状况。这种工作形式的出现需要人员定位技术的支持,跟踪施工人员,将数据传递到计算机,从而确定施工人员的位置。当获得报警数据时,及时采取相应的告警措施,以此在掌握施工进度的同时,保证施工人员的安全[4]。但是现阶段,一些常见告警算法已经不能满足电子围栏施工的实际需求,或多或少存在一些不足之处。如鲁显光等[5]提出的基于频繁模式树(Frequent Pattern Tree,FP tree)的告警算法,通过分析告警历史数据,挖掘告警数据之间的关联,在告警数据间建立起关联,从而保证告警数据的准确,确保告警算法的可靠,但是在实际应用过程中,面对不确定的行为信息数据,在时隙分配过程中出现数据冲突问题,影响告警算法的应用效果,告警算法的自适应性需要进一步提高。刘洋等[6]提出的基于遗传算法BP (Genetic Algorithm Back Propagation,GA-BP)神经网络的告警算法避免了复杂参数对告警效果的影响,采用GA-BP神经网络对施工人员进行安全预警,但是该算法存在与上述类似的问题,算法的自适应性比较差。因此,本研究提出基于射频识别(Radio Frequency Identification,RFID)[7]技术的电子围栏内施工人员行为预判与告警算法,解决上述常见的告警算法中存在的问题。
1 基于RFID技术的电子围栏内施工人员行为预判方法设计
1.1 人员位置定位
采用RFID技术,在每个施工人员身上配备一个腕带型电子标签,通过远程通信技术,实时读取施工人员的信息。在施工人员施工过程中,其自身产生的位置信息、行为信息自动保存到电子标签中,根据实际需求,既可以将信息实时传递到RFID读写器上,又可以暂时保存在电子标签内,在需要时直接调取[8]。考虑到施工环境的复杂性,在定位施工人员位置上,使用的是超高频的RFID设备,通过电磁场的电磁信号实现信息传递和简单通信[9]。
在RFID技术的支持下计算电磁信号的时间,即可确定施工人员的位置[10]。将RFID读写器分别放在4个固定位置,将其设置为静态节点;在附近确定一点P,作为RFID电子标签的持有人,该点作为动态节点存在。上述静态节点与动态节点的关系如图1所示。

图1 RFID读写器及RFID电子标签点位Fig.1 RFID reader and RFID electronic tag point
图1中显示的a、b、c、d 4个点是读写器的位置。在计算施工人员定位点时,按照图1中的结构,在a、b、c、d 4个点附近绘制双曲线,计算P点到a、b两点和c、d两点的距离差[11]。计算公式如下:
lab=t1×v=|Pa-Pb|,
(1)
lcd=t2×v=|Pd-Pc|,
(2)
式中,v表示射频信号传播速度,在计算中是一个固定值,lab和lcd分别表示动点P到a、b两点和c、d两点的距离差,t1和t2分别表示无限射频信号到达4个点的时间差,Pa、Pb、Pc、Pd分别代表P点到a、b、c、d点的距离。P点的轨迹是以a、b、c、d 4个点为焦点作的双曲线[12]。由两点间距离公式可得:

(3)

(4)
式中,x和y表示P点的位置信息,(xa,ya)、(xb,yb)、(xc,yc)、(xd,yd)分别代表a、b、c、d的位置信息,求解式(3)和式(4),可得到P点的坐标,从而确定持有RFID电子标签的施工人员的位置。人员位置确定后,即可获得施工人员的行为信息,预判施工人员的行为。
1.2 施工人员行为判断
通过RFID技术获得施工人员行为信息,在对施工人员行为进行判断时,需要依靠一系列子事件的时序关系和逻辑关系。在确定电子围栏内施工人员的施工过程后,通过与、或、非、集合等逻辑运算符来判断施工人员的行为。
通过“与”定义行为U和行为V的先后顺序,在与时间约束运算符结合时,确定行为发生的先后顺序和间隔时间长短;使用“或”运算符定义多个行为同时发生时的性质,与不同行为的发生顺序无关,仅仅为了判断当行为U或行为V发生时,就会出现行为E;运算符“非”定义某个行为U没有发生时,会触发行为E的发生;“集合”的设置主要定义行为U多次重复发生时,会导致行为E的出现[13]。除了以上判断人员行为的运算符外,还包括RFID标签对象具有的属性值,此类属性可标记相关行为发生的时间戳信息,也可以标记瞬时行为的发生时刻,通过属性可确定施工人员行为发生的时间区间[14]。针对瞬时行为和非瞬时行为,定义不同的时序约束关系,当行为数据产生时,保存到RFID电子标签内,每个行为数据都有时间戳信息,根据时间戳信息和运算符预判施工人员的行为,当判断出施工人员的危险行为后,即可产生对应的报警信息,通过RFID电子标签对施工人员发出告警。
2 电子围栏内施工人员行为告警算法设计
2.1 防冲突设计
当电子围栏内存在多个施工人员时,读写器在给电子标签提供较小的帧长时,可能会发生较多的碰撞冲突,影响对电子标签的识别,因此,设计防冲突算法,可保证电子标签的识别效果。
已知当时隙数与标签数相等时,告警效果最佳,因此,在每个电子标签识别周期开始时,估计标签数,根据估计的标签数,实时调整周期帧长,确定第一个时隙状态函数e1f[15]。该函数表示如下:
e1f(N,s0,s1,sk≥2)=s1+2sk≥2,
(5)
式中,N表示帧长,k表示发生碰撞的标签数,s0、s1和sk≥2分别表示上一识别周期内空闲、成功和碰撞时的时隙数[16]。根据每个时隙内标签数的二项式分布概率原理,得到第二个函数e2f:
(6)

2.2 告警数据的处理与传输
在预判施工人员行为后,将产生与施工人员行为相对应的告警数据,在告警数据产生初期,建立告警日志记录,整个创建步骤包括创建logger和handler,定义formatter,将handler添加到formatter,再将handler添加到logger。logger作为告警日志记录的规则,限制了记录的格式和告警的等级。
在实际应用中,告警信息以序列的形式发送到施工人员的电子标签内,定义告警起始时间为tz,终止时间为te,则告警序列表示为Z=(z,tz,te),z表示序列。对于告警序列Z上的一个告警子项,表示形式为M=(m,tz,te),告警发生的时间就在告警起始时间和终止时间之间,对于告警子项,m=te-tz就是时间窗口,通过时间窗口确定告警序列Z的告警时间。
在获得告警信息后,确定该信息输入的起始时间和结束时间,根据规则和告警等级将信息拆分,分别存储在不同的模块内,经过处理后将数据传递到施工人员的RFID电子标签内,对施工人员发出警告。至此,基于RFID技术的电子围栏内施工人员行为预判与告警算法设计完成。
3 实验研究
3.1 实验方案设计
电子围栏内施工人员行为预判与告警算法设计完成后,通过实验研究验证方法的性能,该方法中涉及对施工人员的实时定位和行为信息的传递,在信息传递的过程中可能存在读卡器冲突的问题,如读取的信息是错误信息,或者信息漏读等,这种情况下会导致行为信息不准确,进而导致不能正确判断施工人员行为,出现错误的告警信息,甚至导致告警不及时,出现安全事故。因此,根据上述信息,在实验中引入FP tree和GA-BP两种常见的告警算法,设计两组对比实验,验证算法的可行性。
第一组对比实验以10个读卡器(L1-L10)为例,设计读卡器冲突和平面结构,具体如图2所示。
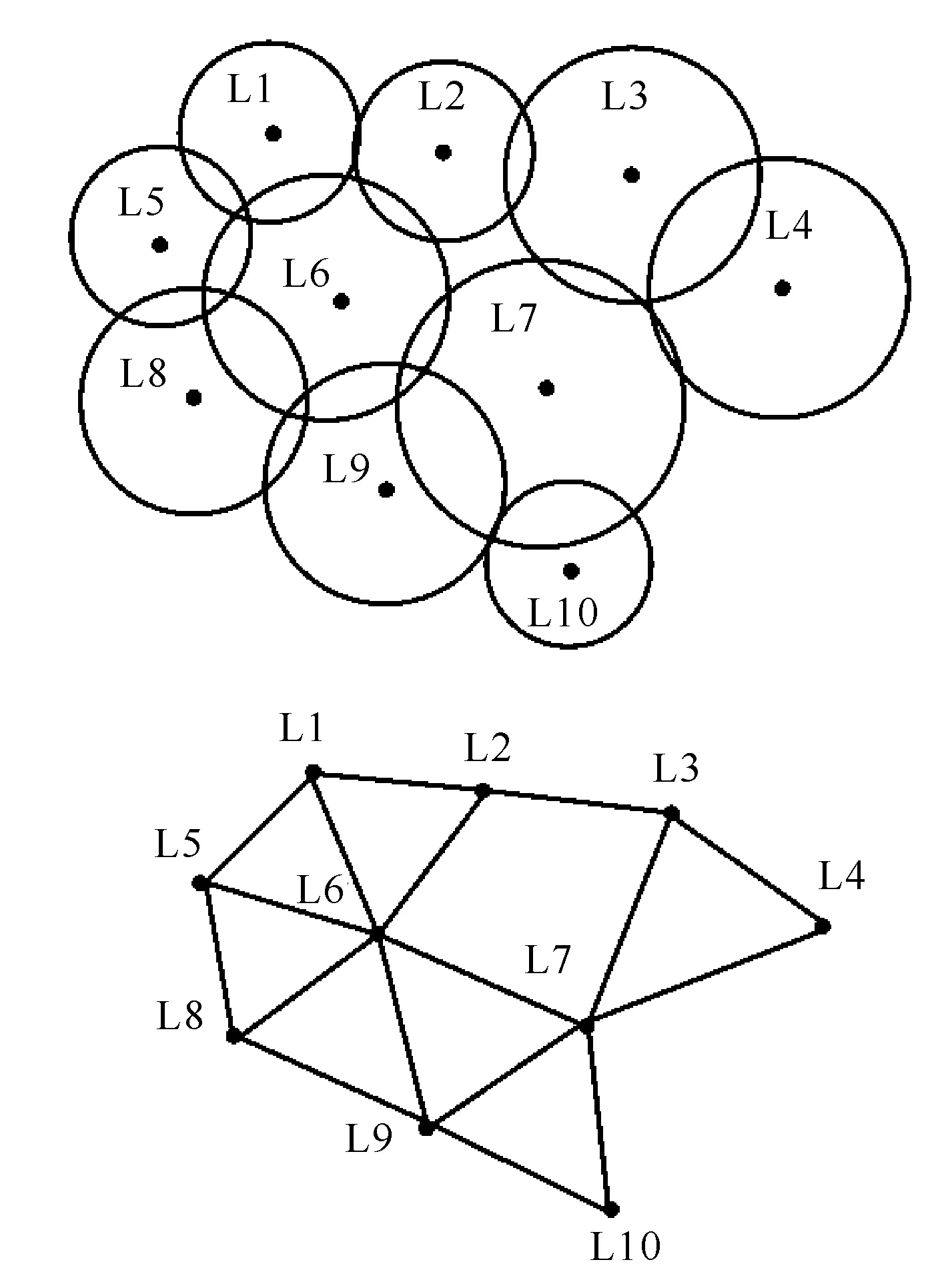
图2 读卡器冲突设计Fig.2 Reader conflict design
图2上半部分显示的是读卡器的结构图,下半部分显示的是读卡器的平面示意图。依据图2示意的读卡器结构,构建阶对称矩阵,当矩阵等于1时,读卡器之间存在冲突。构建的矩阵与每一个读卡器相对应,设置的值分别是0100110000,1010010000,0101001000,0010001000,1000010100,1100101110,0011010011,0000110010,0000011101,0000001010。根据上述内容,为不同算法的时隙分配一个相同的赋值,在赋值相同的情况下,分析各个告警算法对冲突的处理能力。赋值如下:1000,0100,0001,0100,0001,1000,0010,0100,0010。
在实验中,设置读卡器数目为10,15,20,设置在不同的时隙中、不同的条件下分别进行20次实验,计算不同告警算法的时隙分配结果,判断是否存在冲突,以此衡量告警算法的自适应性。
第二组实验以施工人员行为信息的识别为主,在对施工人员进行行为预判时,识别施工人员的行为信息十分重要,只有识别的行为信息足够正确,才能确保对技术人员行为预判的准确。实验中选择部分施工人员行为作为实验样本,如图3所示。

图3 施工人员行为识别实验样本Fig.3 Experimental sample of construction personnel behavior identification
使用人体结构化特征(BSE)构建网络和关节点估计两种不同的方法对样本中的行为进行信息采集,输出信息识别结果,对比分析不同方法的行为识别信息的完整性和准确性。在两组实验结束后,将两组实验结果结合在一起分析提出的行为预判方法和告警算法的性能。
3.2 时隙分配实验结果与分析
在时隙分配实验中,设置不同的读卡器数目,并在不同读卡器之间设置冲突关系,使用不同的告警算法处理,并使用第三方插件监控整个处理过程,在处理完成后,输出时隙分配实验结果,具体结果如表1所示。
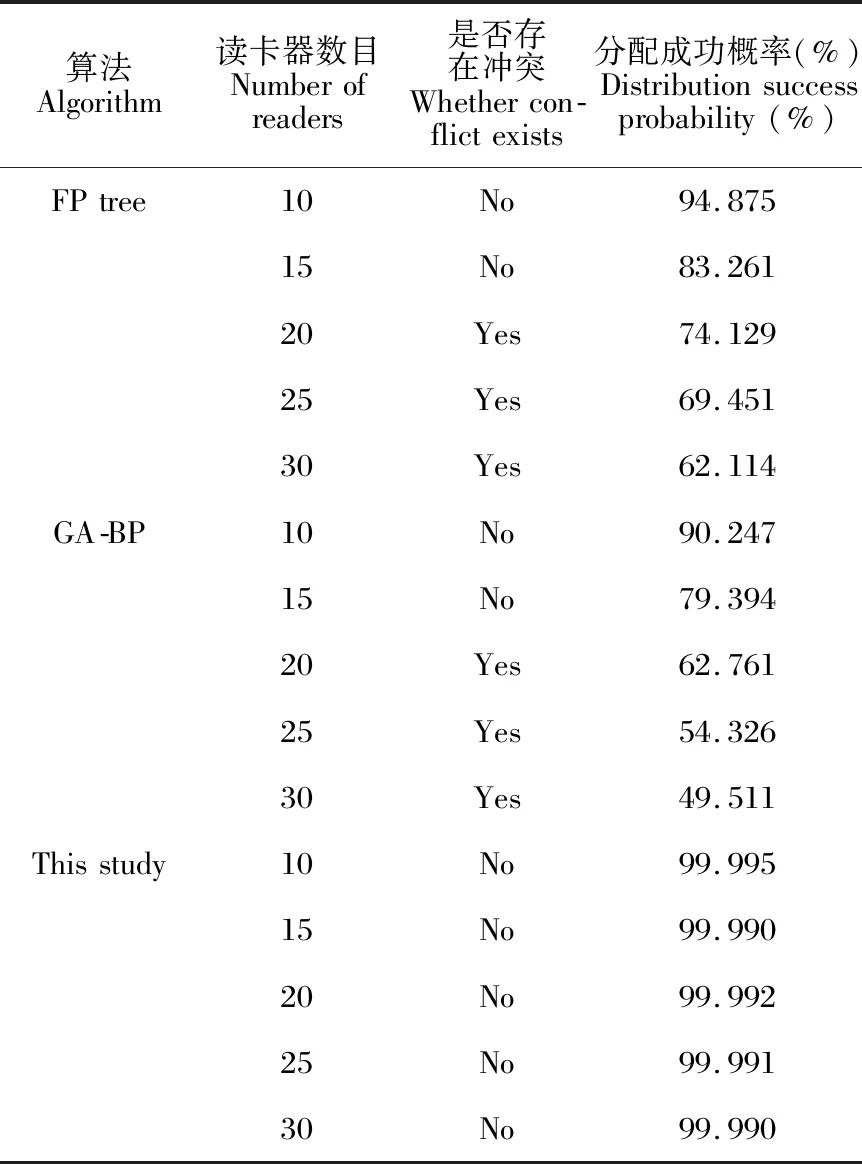
表1 不同告警算法的时隙分配实验结果Table 1 Time slot allocation experiment results of different alarm algorithms
由表1显示的实验数据可知,基于FP tree的告警算法在读卡器较多的情况下存在冲突关系,导致分配成功率不高,并且呈现出读卡器越多,其成功率越低的情况;基于GA-BP的告警算法存在相同的问题,读卡器之间的冲突严重影响告警信息的传递和告警的即时性。上述两种方法均是在读卡器数目增加到20个时出现冲突,并且随着读卡器数的增加,冲突并没有消失,也没有得到解决。相比之下,本文提出的算法在读卡器增加的情况下没有出现冲突,并且分配成功率在99%以上,说明该算法有效地解决了读卡器冲突问题,其时隙分配水平更高,能够进一步保证告警的即时性。
3.3 施工人员行为信息识别实验结果与分析
在第二组实验中,以图2中的实验样本作为目标,使用不同的行为预判方法(提取边缘特征,采用支持向量机方法对样本对象行为进行预判断;使用基于非负矩阵分解的方法来构造人体姿势作为一级特征,对样本对象行为进行预判断)采集施工人员行为信息,计算处理行为数据的时间开销和有效信息识别信息量,实验结果如图4和图5所示。
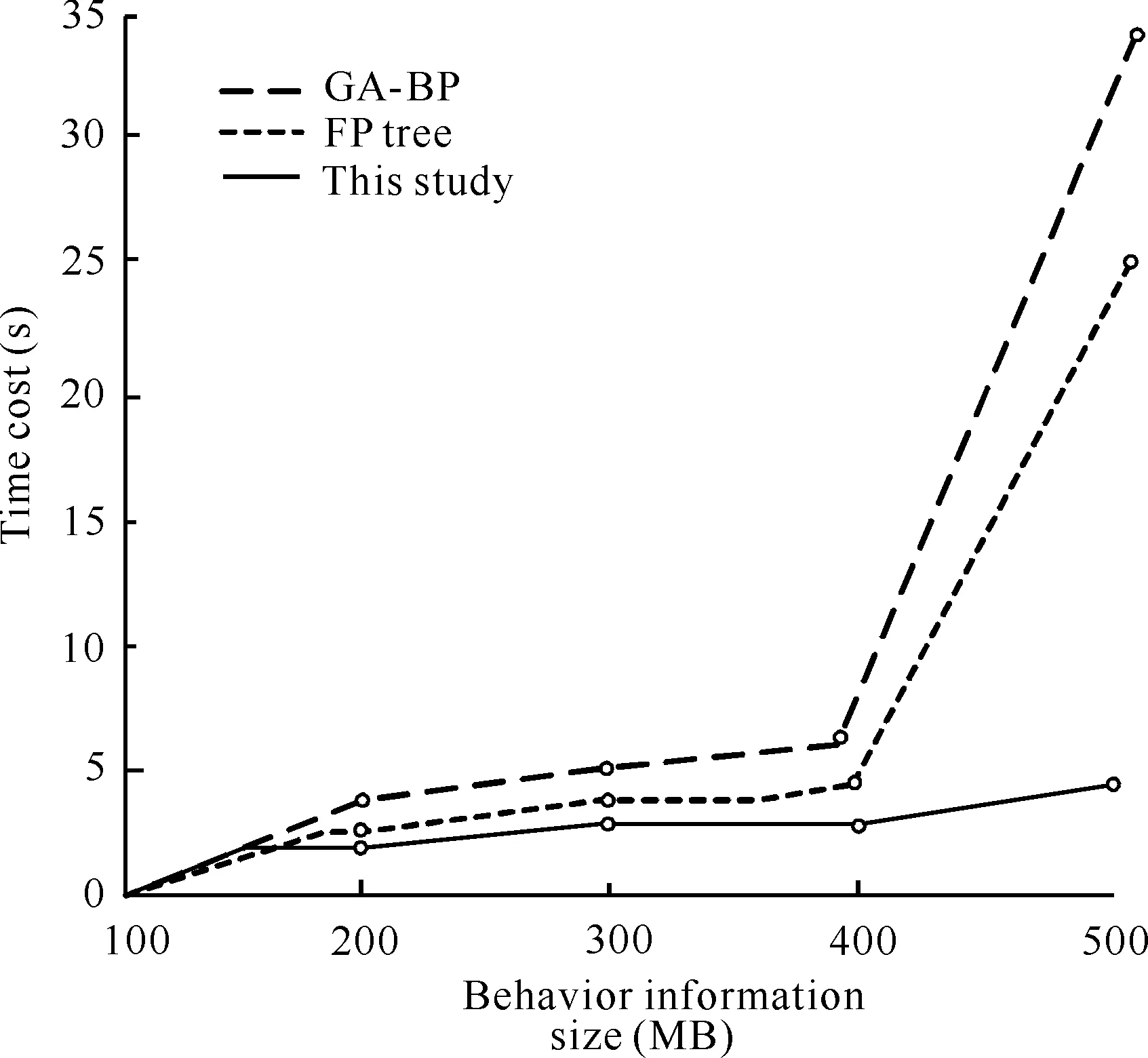
图4 施工人员行为识别时间开销实验结果Fig.4 Experimental results of time cost of construction personnel behavior recognition

图5 不同方法有效信息识别量实验结果Fig.5 Experimental results of effective information recognition with different methods
实验采用定量分析,在时间开销实验中,设置行为信息大小最大为500 MB,在不同方法的处理下,各个方法处理行为数据需要的时间开销不同[17],观察图4中的实验结果可知,在400 MB以内,3种方法处理行为信息的时间开销相差不大,对于高于400 MB的行为信息,基于GA-BP的方法和基于FP tree的方法时间开销比较大。相比之下,本文提出的方法在处理较大行为信息时,时间开销较小,且没有出现明显增加趋向。
在有效信息识别量实验中,固定识别时间,输出在相同时间内,比较不同方法识别的有效行为信息量[18]。对比观察图5中实验结果可知,在3种方法中,基于FP tree的方法和基于GA-BP的方法随着时间的增加,处理的有效信息量在不断增加,但是与本文提出的方法相比,增加得比较缓慢,本文提出的方法所包含的有效信息是另外两种方法的两倍。综上所述,本文设计的基于RFID技术的电子围栏施工人员行为预判与告警算法对人员行为信息的识别效果更优秀。
结合时隙分配实验结果分析可知,本文设计的基于RFID的电子围栏内施工人员行为预判与告警算法有效地解决了常见算法中存在的问题,从行为信息处理和时隙分配两方面完善了告警算法,证明该算法具有更好的自适应性,能够根据外界环境调整自身性能,保证实际应用水平。
4 结论
本文从电子围栏内施工人员的安全保障出发,研究施工人员的行为预判与告警算法,在查阅了相关文献和资料的情况下,设计了基于RFID技术的电子围栏内施工人员行为预判与告警算法,并在算法设计完成后,通过对比实验验证了算法的可靠性,证明该算法具有更好的自适应性。但是由于电子围栏施工的工作环境比较复杂[19],存在很多安全隐患,单一地通过施工人员的行为预判依然不能完全保证施工的安全。因此,在后续研究中,将结合施工环境的多变性,完善告警算法的性能,为电子围栏的施工提供更好的安全保障。
猜你喜欢
进出口经理人(2021年8期)2021-02-12
出版人(2020年5期)2020-11-17
电脑爱好者(2020年17期)2020-09-14
今日农业(2019年14期)2019-01-04
中国交通信息化(2017年8期)2017-06-06
电子技术与软件工程(2016年24期)2017-02-23
中国公共安全(2017年11期)2017-02-06
武夷学院学报(2015年3期)2015-07-18
中国交通信息化(2015年11期)2015-06-06
中国卫生(2014年3期)2014-11-12